现代海洋测绘及通信技术在港口航道疏浚工程测量中的应用
2018-10-15 07:57黎铈图
中国水运 2018年10期
黎铈图
(广西新港湾工程有限公司,广西 防城港市 538001)
1 航道疏浚工程概况
某北方城市港口航道疏浚工程长度达千米(从7+0~44+0),航道底部宽度:210m,选择自航耙吸式挖泥船来疏浚,然而,此疏浚工程面积大、范围广、有大量船舶通行,且通行频繁,这就为测量带来困难。传统的测量技术和设备无法达到理想的精细度,还会拖延时间。为了提高测量效率,就要采用新型现代海洋测绘与通讯技术。
2 海洋测绘及通讯技术设备类型及特点
2.1 LRK测量技术
本航道疏浚工程测量选择了Sagitta射手接收机,此机器是为海上测绘与通讯量身设计打造的,主要依靠UHF电台数据链,实际使用中体现出高度集成化、灵活性、良好选择性、功能安全、稳定等优点,而且此数据链所覆盖的作业范围最大、距离最远,最大的作业范围达到40km, 而且能够全面提升平面定位的准确度和精度,达到1ppm。
2.2 潮位遥报系统
对于此航道疏浚工程测量来说,主要选择潮位遥报验潮仪,灯塔自动遥报验潮仪,具体型号分别为:SAC5-1,KCYL-A,而且平面定位设备则要负责测出潮水位置。
2.3 多波束系统
测量水深的仪器主要采用来自于美国的多波束系统,此系统得益于高端现代化技术、智能技术,具体的性能参数如表1所示:
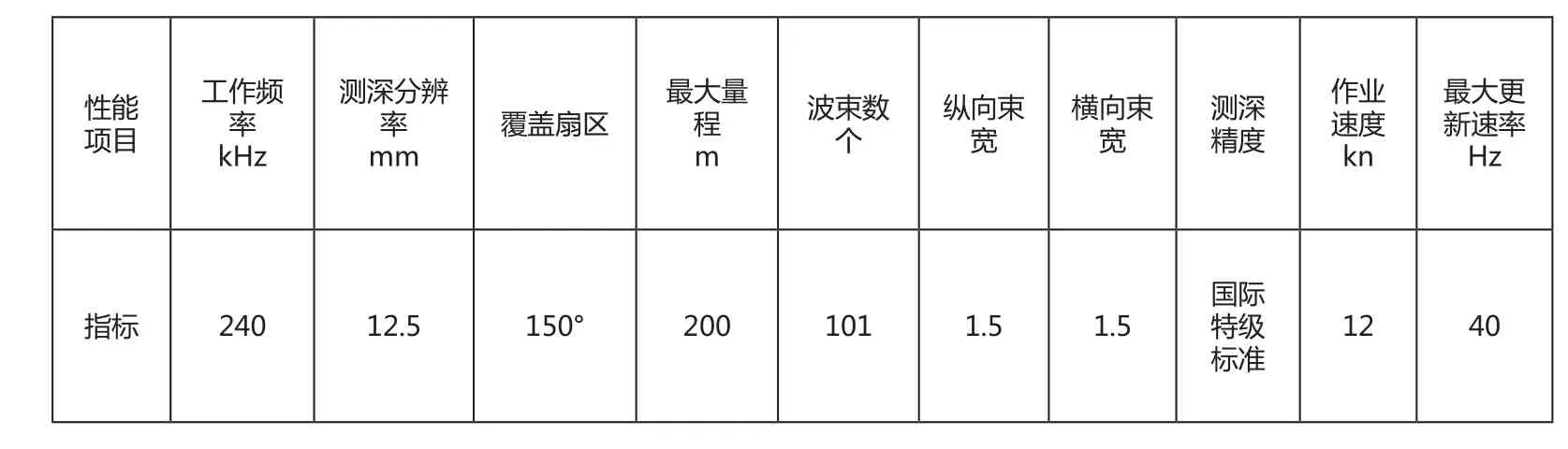
表1 水深测量仪参数
3 港口航道疏浚工程测量中现代测绘与通讯技术的运用
为了缓解此港口航道疏浚施工压力,提高测绘、测量的效率和精度,就要采用现代测绘与通讯技术,对此决定选择多波束技术、LRK技术、潮位遥测技术等,实际的使用情况如下:
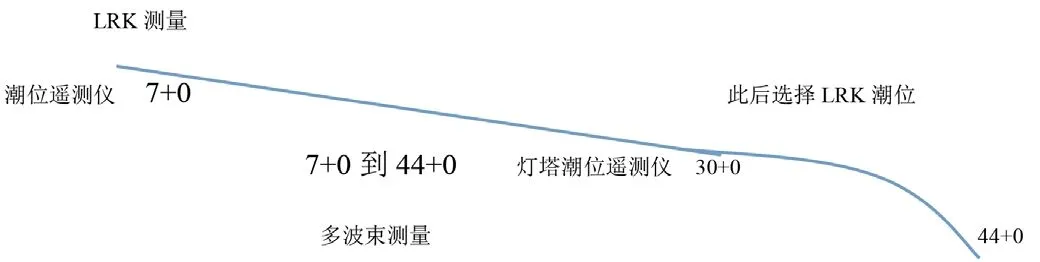
图1 航道疏浚范围与应用技术
3.1 LRK测量技术
此技术别名:远距离双频实时动态载波相位差分技术,将GPS信息接收器分别配设于运动载体,同时,配设于地面的若干基准点,它们相互配合、协调作业能够发挥动态定位功能,可以准确地测出运动载体的空间定位,也能准确地提供载体的运动轨道、工作轨迹。这一定位系统的定位有着动态定位的性质,参照各个时段定位的需要,灵活地进行定位服务。此动态定位系统又具体划分为:实时差分动态定位、后处理差分动态定位。其中前者则须创建无线电DGPS数据传输系统,一边观测,一边算出运行工具的定位。DGPS可以高效、远距离地传输数据,实际的距离则受到多种因素影响,例如:设备数据链、基准台数据链、运动载体电台天线的装配高度等。其中数据链电台则选择了超短波频率,这一通讯设备一般局限于视距范围,而且发射台高度、接受台的位置等也会影响视距,三者关系如下公式:

其中,D——视距,(km)h1——基准台数据链电台天线的配装高度,h2——运动载体数据链电台天线的配装高度。
根据上面的公式,为了确保型号可以大范围、远距离传递,也就是在40km以外的距离传递,则要从基准台、船台两大天线的高度加以把握,二者之和应该在94m以上,参照港口附近建筑物的实际情况,可以将VTS塔定位基准站,实际天线应该在88m以上。同时,以精准测量基准台位置为目标,可以选择RTKgps系统,凭借此系统来收集来自于控制点中GPS差分数据,对应准确地测量出基准台的实际位置,并借助7参数进行转换,则能获得此点的坐标。
以上测量定位主要采用了LRK技术,一方面能够全面提升测量精准度,另一方面也达到了动态的适时测量。基于以上特殊的功能,则适合用在距离验潮站较远的区域的测量。
3.2 基准台站的自动化遥控装置
此航道疏浚工程,主要通过GPS差分基准台来对船舶加以遥测,通常测量操作应该在白天,这就需要晚上将电源关闭,这样不仅节省能源,也能减少设备的损耗。因为LRKGPS基准台站配设于VTS塔,这样就难以人为地控制电源,对此引进自动化开关遥控设备,这一自动开关设备主要以GSM信号形式来传递信息,并借助移动通讯设备接受信息的方式来达到对电源的控制。
3.3 深度基准面的传输
传统的测水深设备具有局限性,只能测出水体瞬间深度,然而,海洋表层不会永远平静,必然受到风浪、潮汐等的影响,要想获得平稳状态下的海底地形水深值,则可以将各个瞬间测深值进行集中统计,而且要化归至平稳的深度基准面,具体依照下列公式: L(x,y)=MSL(x,y)-l(x,y)
L(x,y)——x,y位置的深度基准面高程,MSL(x,y)——平均海面,l(x,y)——平均海面和深度基准面二者之差。
从上面的关系式能够算出平均海面,具体方法包括:回归分析法、同步改正法等,对于此航道疏浚施工来说,可以选择同步改正法来传输深度基准面,具体原理为:将测量船当做验潮站,并对应标识相关的关键点坐标与数值。
3.4 潮位遥报系统
这一航道疏浚工程的最远处和陆地之间相距37km,港口内外的水位差别,主要影响因素就是潮汐差、潮汐时间等,也就是航道不同位置所测得的潮位值也不同,需要区别对待。根据试验实践得出:相同区域,各个潮汐时段的测量结果之间的差距达到半米。为了确保测量准确度,就要选择科学的潮汐误差控制法。对此,已经潮位遥报系统,同步配合于LRK-DGPS系统来测出潮位。
(1)浮子式自动验潮仪的使用。此验潮仪器在水位测试、测量中有着较高的精准度,达到1厘米。而且能够将一切测得数据凭借VHF来输送至数据处理中心,数据传输之间相隔5分钟,数据中心安装了数据接收设备,能够获取潮位信息,并途径相关串口来同计算机系统相连,对应输出数据。
(2)压力感应式自动验潮仪的使用。其潮位测量精准度也很高,达到1cm。
(3)LRK-DGPS测量系统的使用。主要应用范围:30+0海里处的潮位,其测量精准度较高达到1ppm.但是其验潮位的精准度却相对欠缺,难以达到潮汐的准确测量。
3.5 多波束测量
(1)科学装配换能器。实际安装中要重点把握以下关键因素:安装是否稳定,必须确保换能器达到理想的校准状态,确保运行安全。在确保测量船航行、停岸时处于高度安全状态,不会对其他设备、装置带来影响,为了达到这一目标可以将各项测量成功进行后,提高换能器,达到水面上方,船舶范围内,是否方便拖放。要将换能器定位在易于拖放的位置。
(2)多波束的审核校对。必须切实根据相关规范来进行多波束的审核、校对,可以参照系统所供应的校准参数,把此参数利用数据处理软件来加以传输处理。
(3)数据的采集与处理。准确测出声速,而且将数据传输到测量软件,在此基础上来采集相关信息、数据,可以根据预先已经设计成功的测量线来加以测量,为了对航道进行全方位的测量,可以设置若干测量线,达到全范围测量的目标。
因为多波束测量需要大量的数据、信息,这其中容易受到一些内外因素干扰。对此可以尝试将数据处理计算机配设于测量船,而且要利用以太网来联系数据采集与处理系统,这样就能达到数据、信息的交流、分享,从而提高数据采集与处理效率,提高测量数据的准确度。
测量数据的处理主要通过1x1m的方式展开,再将测量数据通过2x2m的水深网格来供应,这样就能彻底达到航船的需要。实践证实,此数据处理方法能够有效确保施工作业效率,而且测量成功后能及时地供应测量数据。
4 测量效果分析
经过多种现代化测绘技术的运用,特别是多波束测量技术,其所获得的数据覆盖面广、范围更大,而且测量精度更高,10km的航道,其测量数据经压缩,形成一个压缩包方便传输,提高了测绘工作效率。
港口航道疏浚工程测量中,多种现代测绘技术的协调利用能够确保测量的精度和准确度,而且提高了测量工作效率,特别是数据信息的自动化传输,确保了测量准确度,然而,个别现代测绘技术实际使用中依然有待于发展与完善,需要不断地深入研究,提高其使用效率。
猜你喜欢
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07
港工技术(2022年2期)2022-05-12
河北地质(2021年1期)2021-07-21
军民两用技术与产品(2021年10期)2021-03-16
中国交通信息化(2020年7期)2021-01-14
中国港湾建设(2020年9期)2020-09-10
当代陕西(2020年24期)2020-02-01
北京航空航天大学学报(2019年9期)2019-10-26
安阳工学院学报(2018年6期)2018-11-28
北京航空航天大学学报(2017年3期)2017-11-23