
纯反馈非线性系统的鲁棒自适应跟踪控制
2018-10-13 08:18:14左仁伟董新民刘棕成
电光与控制 2018年10期
左仁伟, 董新民, 刘棕成
(空军工程大学,西安 710038)
0 引言
近年来,非线性系统的控制设计问题引起了各国学者的广泛关注,在严格反馈系统控制领域取得了很多成果[1-6]。但实际中存在很多非仿射纯反馈结构的非线性系统,如生化处理系统、飞行控制系统、Duffing振荡器以及机械系统等,因此研究非仿射纯反馈系统的控制理论具有一定的实际意义。
由于非仿射纯反馈系统的控制问题更复杂且更具挑战性,取得的成果还比较少见[7-19]。已有研究成果中对非仿射纯反馈非线性系统控制设计方法主要依靠均值定理与隐函数定理[10-15]。文献[10-14]针对具有下三角结构的纯反馈非线性系统讨论了自适应神经网络backstepping控制方案;文献[15]针对具有非仿射函数和未知死区的纯反馈系统,结合均值定理和backstepping技术,提出了一种直接自适应控制方法。上述文献都假定非仿射函数对于输入变量是可导的,甚至导数必须是严格为正或负。针对非仿射函数不可导的纯反馈非线性系统的控制问题,文献[16]提出了能保证非仿射纯反馈非线性系统可控性的连续性函数条件,取消了非仿射非线性函数必须可导的假设;文献[17]在文献[16]的基础上进一步放宽了非仿射函数连续性条件。然而,上述方案未考虑非仿射函数不连续时的控制问题。
基于以上分析,本文就一类非仿射函数不连续的纯反馈非线性系统的控制问题,提出了一种鲁棒自适应神经网络控制方法。本文所提方案具有以下优点:1)取消了非仿射函数必须满足连续性条件;2)考虑了控制输入存在死区非线性的情况;3)引入了自适应补偿项消除建模误差、神经网络逼近误差和外界干扰造成的影响;4)从理论上证明了闭环系统的所有信号半全局一致终结有界。
1 问题描述和准备
考虑如下一类纯反馈非线性系统
(1)



(2)

(3)
(4)

。
(5)


(6)

引理1[18]双曲正切函数是连续可导的,并且对于任意q∈R和∀υ>0有以下不等式成立
(7)
输入u,输出v(u)的死区模型描述为
(8)
假设死区模型具有如下基本性质:1)死区输出v(u)是不可测量的;2)死区的倾斜度kr=kl=k;3)死区参数br,bl和k是未知的有界常数,但它们的符号已知,br>0,bl<0,k>0。
根据上述死区的基本性质,重新定义死区模型为
v(u)=ku+εu
(9)
式中,
(10)
εu≤ε*,ε*是未知正常数。

引理2[20] 已知V(·)和(·)是[0,tf)上的光滑函数且V(t)≥0,tf∈[0,∞],N() 是Nussbaum函数,
如果下列不等式成立

V(t)≤c1+e-c2t∫t0[gN((τ))+1]ec2τdτ(11)
式中:c1为适当的常数;c2为正数;g为非零常数,那么

V(·),(·)和∫t0N((τ))dτ在区间[0,tf)上有界。
本文将采用RBF神经网络进行逼近。RBF神经网络是一个线性参数化的神经网络,其能以任意精度逼近任何连续非线性函数φ(Z),即
φ(Z)=Θ*Tξ(Z)+μ
(12)
式中:输入向量Z∈ΩZ⊂Rn,n是神经网络的输入维数;μ为神经网络的逼近误差且满足|μ(Z)|≤μ*,μ*是未知正数;ξ(Z)∈Rl为径向基函数向量,l>1为神经网络的节点数;Θ*∈Rl为最优权值向量,即
(13)
式中,Θ为任意的权重向量。
左仁伟等: 纯反馈非线性系统的鲁棒自适应跟踪控制
2 控制器设计及稳定性分析
定义式(1)闭环系统的状态跟踪误差为e1=x1-yd,ei=xi-αi f(i=2,3,…,n)。设计过程共包含n步。在前n-1步中设计期望虚拟控制信号αi-1,再以αi-1为输入通过一阶滤波器得到αi f,在第n步设计自适应控制器u。
第1步 沿e1=x1-yd对e1求导可得

(14)
将式(5)和式(12)代入式(14)可得


(15)
构造虚拟控制律α1以及自适应律为

(16)
(17)

将信号α1通过一个一阶滤波器,滤波器的输出为α2f,时间常数为τ2,即

(18)
定义滤波器的输出误差为y2=α2f-α1,于是有


(19)
根据x1=e1+yd,存在未知连续函数
(20)


(21)
由式(4)可知
(22)
进一步可得

(23)
(24)
第i步(2≤i≤n-1) 沿ei=xi-αif对ei求导可得

(25)
将式(5)和式(12)代入式(25)可得


(26)
构造虚拟控制律αi以及自适应律为

(27)
(28)

将信号αi通过一个一阶滤波器,滤波器的输出为αi+1f,时间常数为τi+1,即

(29)
定义滤波器的输出误差为yi+1=αi+1f-αi,因此


(30)

由xi+1=ei+1+αi+1f和yi+1=αi+1f-αi,可得xi+1=ei+1+αi+yi+1。存在未知连续函数如下
(31)
定义如下紧集

(32)
(33)
注意由式(4)可得

(34)
(35)

第n步 沿en=xn-αn对en求导可得

(36)
将式(5)、式(12)代入式(36)可得

(37)
构造实际控制器u以及自适应律为

u=N()[Gn,mknen+α·nftanh(enα·nf/υn)+
ntanh(en/υn)] (38)

(39)
(40)

(41)
注意由式(4)可得

(42)
(43)
定理1考虑式(1)一类纯反馈非线性系统,设计虚拟控制律αi为式(16)、式(27);实际控制器u为式(38),以及自适应律为式(17)、式(28)和式(40),使得闭环系统所有信号半全局一致终结有界,并且通过选择适当的设计参数,系统输出趋于给定参考轨迹的一个小邻域。
证明定义Lyapunov函数为
(44)
对V求导可得
(45)


(46)

代入控制律和自适应律,在式(46)的右边同时加

减并根据引理2可得V·≤-ni=1kiGi,me2i+Gn,MkN()++ni=1Gi,mσi(θ~iθ^i+Φ~nΦ^n)+
(47)

V·≤-ni=1kiGi,me2i+ni=2-y2iτi+yiMi +Gn,MkN() + +

(48)
由Young不等式可得
(49)
将式(49)代入式(48)可得



n-1i=2-kiGi,m-Gi,M-12c2 e2i +C1+Gn,MkN() + (50)

n-1i=1ω1y2i+1+Gn,MkN() + + C1(51)
利用式(44),可将式(51)改写为

V·≤-C2V+C1+Gn,MkN()+ (52)
对式(52)两边积分,然后化简得
V(t)≤(V(0)-C1/C2)e-C2t+C1/C2+
在区间[0,tf)上有界,由此,令

∫t0Gn,MkN()+1 e-C2(t-τ)dτ≤M(54)
则由式(53)和式(54)可得
V(t)≤V(0)+C3+M
(55)


θ^,e和均为半全局一致终结有界。
由式(44)和式(55)可得

(56)
因此,可以通过调节设计参数使得系统输出趋近于期望轨迹的一个小邻域内。
3 仿真分析
考虑如下纯反馈非线性系统
(57)


(58)
由式(58)可以看出,f2(x,v(u))关于u是不连续的。非线性死区模型为
(59)


选取Nussbaum函数为N( )=e cos(π/2)。 仿真结
果如图1~图5所示。闭环系统所有信号半全局一致终结有界,并且跟踪误差可收敛到原点附近的一个小邻域内。
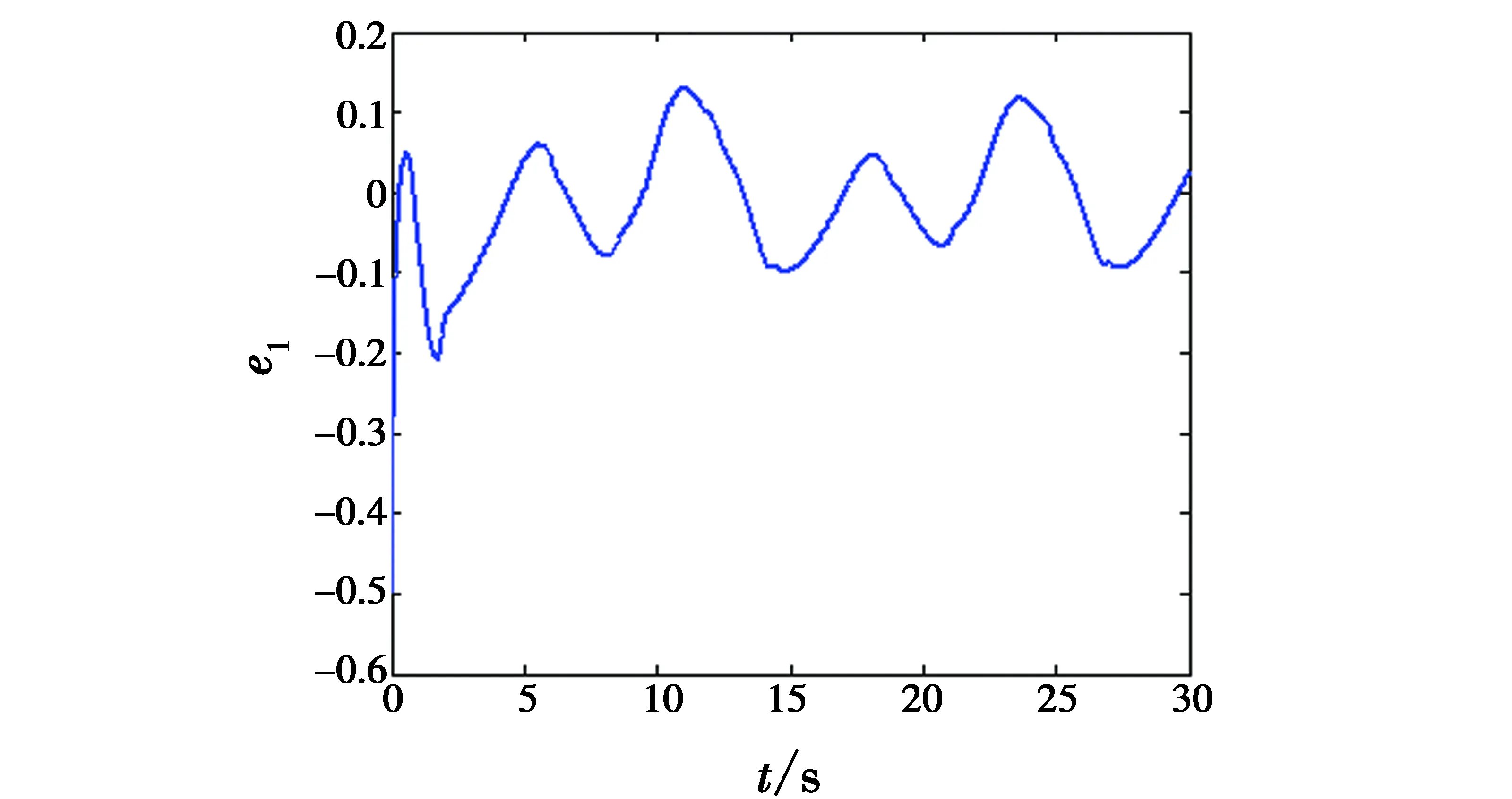
图1 跟踪误差e1Fig.1 Tracking error e1
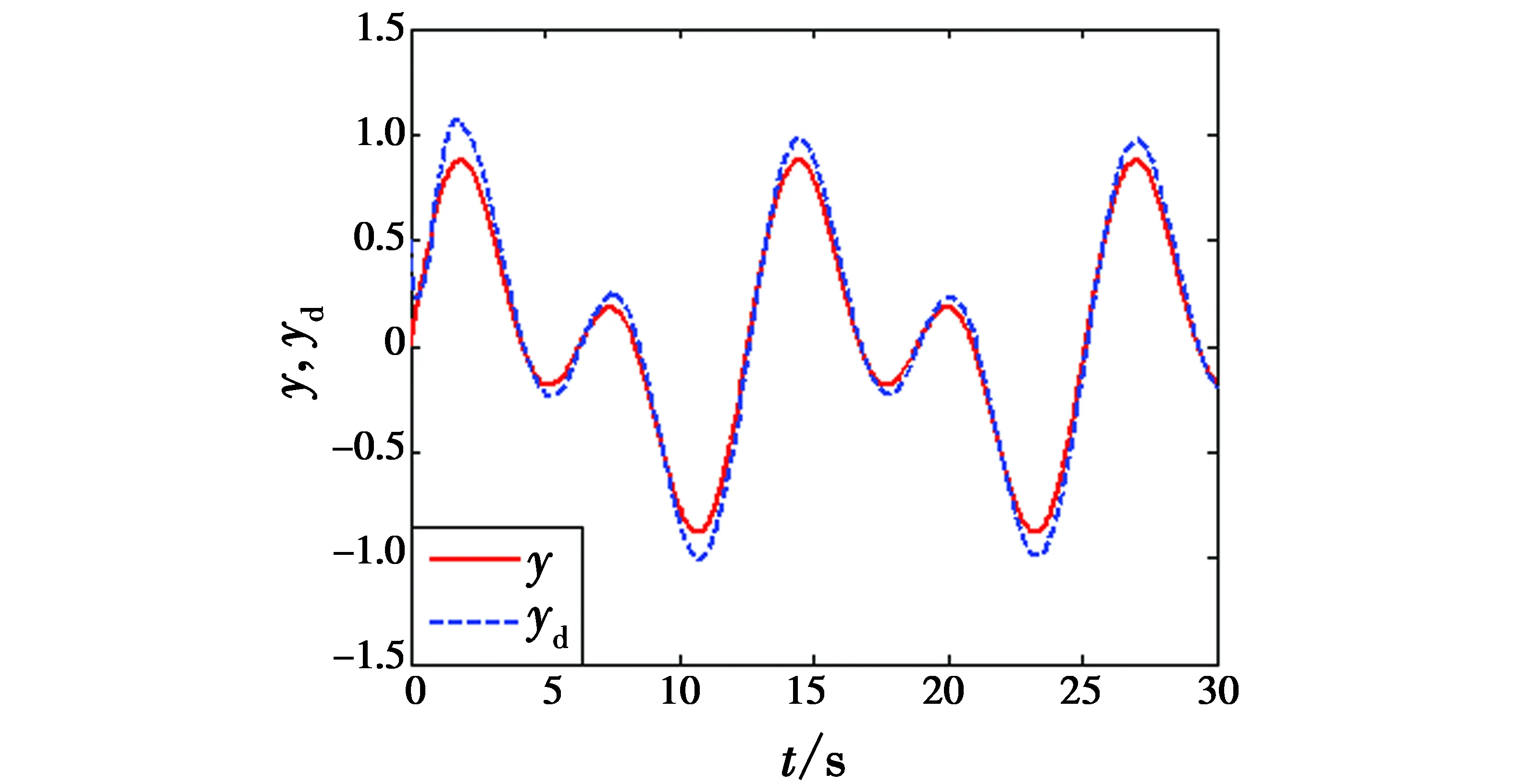
图2 期望轨迹yd和系统输出yFig.2 Reference trajectory yd and system output y
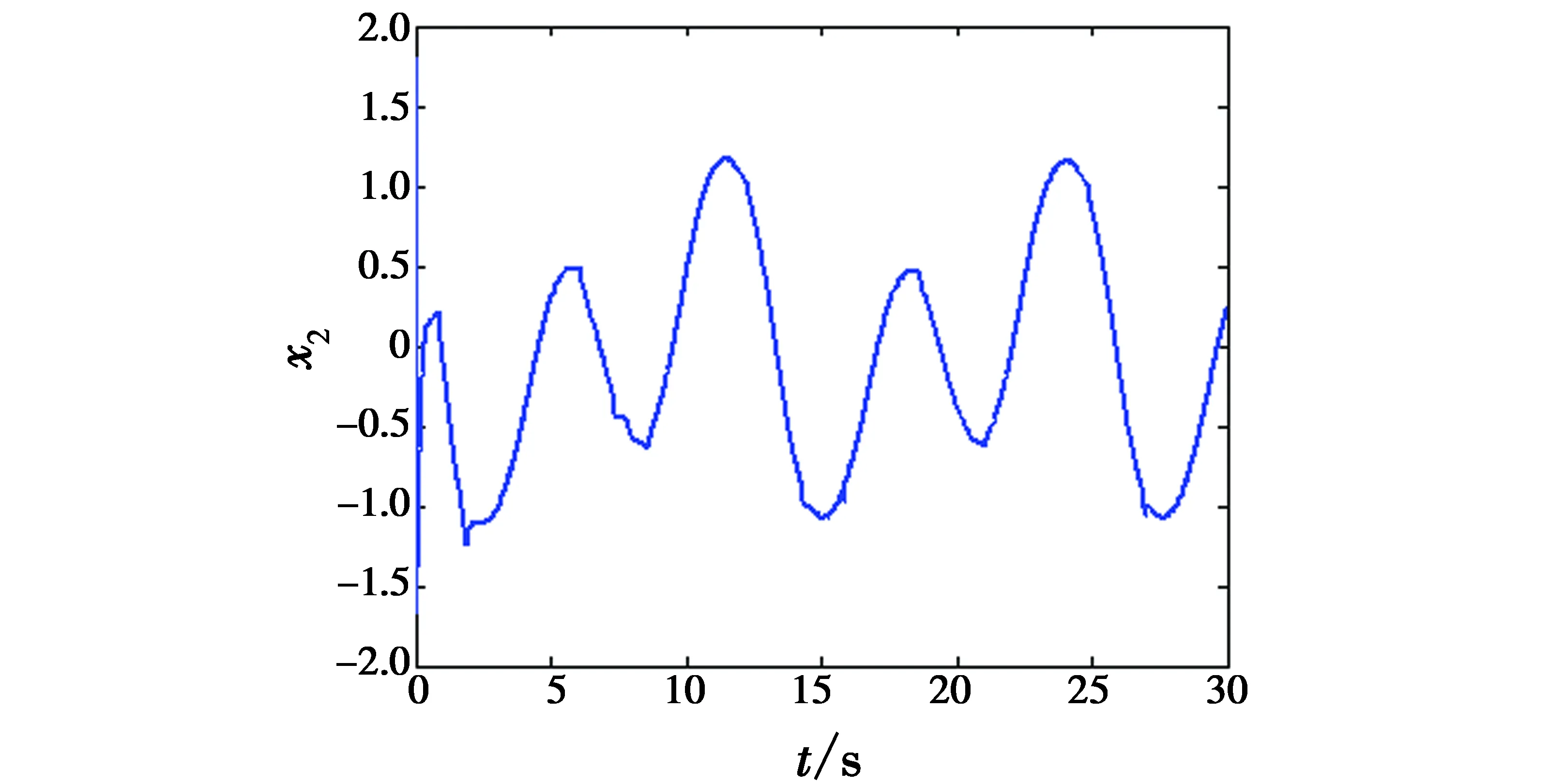
图3 系统状态变量x2Fig.3 System state variable x2

图4 控制输入uFig.4 Control input u
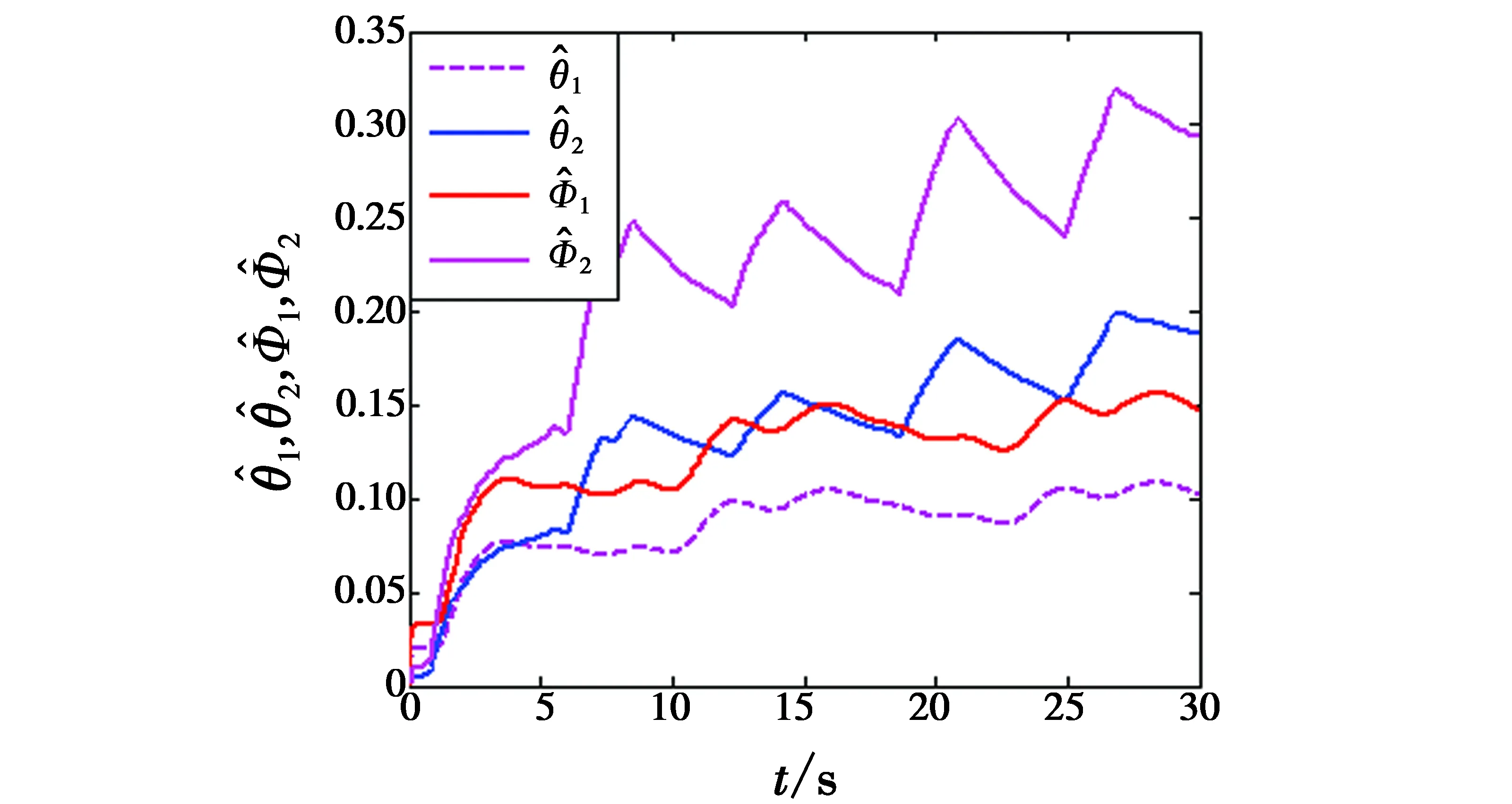
图5 自适应参数1和2Fig.5 Adaptive parameters 1and2
4 结束语
本文研究了一类非仿射函数不连续的纯反馈非线性系统的跟踪控制问题。与以往文献相比,取消了非仿射函数的连续条件,可以被应用于更广泛的一类纯反馈系统。本文进一步研究的方向是在状态不可测条件下设计非线性系统的观测器。
猜你喜欢
计算技术与自动化(2024年3期)2024-10-10 00:00:00
哈尔滨商业大学学报(自然科学版)(2022年4期)2022-08-18 13:07:30
吉林大学学报(理学版)(2020年3期)2020-05-29 06:31:40
三峡大学学报(自然科学版)(2019年5期)2019-10-17 02:24:22
电子制作(2019年11期)2019-07-04 00:34:38
电子制作(2018年16期)2018-09-26 03:26:50
成都信息工程大学学报(2018年6期)2018-03-21 05:46:12
火控雷达技术(2016年2期)2016-02-06 02:29:00
电源技术(2015年5期)2015-08-22 11:18:38
三峡大学学报(自然科学版)(2015年2期)2015-07-25 06:42:56
