
非均匀采样网络控制系统的镇定控制器设计
2018-10-11 01:34王玉龙王天宝冯毅夫
江苏科技大学学报(自然科学版) 2018年4期
王玉龙,王天宝,冯毅夫
(1.江苏科技大学 电子信息学院,镇江 212003)(2.江苏大学 电气信息工程学院,镇江 212013)(3.吉林师范大学 数学学院,四平 136000)
网络控制系统是一种空间分布式的系统,该类系统的通信是借助于共享的通信网络来实现的.将网络引入传统的控制系统会带来诸多好处,如低成本、高可靠性等;但是,也会导致网络诱导时延、丢包、数据漂移、时序错乱等现象.现有文献对网络诱导时延及丢包问题开展了较多研究,并得到了一些新颖的成果.文献[1]研究具有两通道随机丢包和时延的线性系统的网络化控制问题.文献[2]研究具有关联丢包的网络控制系统固定速率向量量化问题.对于无人水面舰艇,文献[3]研究基于网络的故障检测滤波器与控制器协同设计问题.在传感器到估计器通信限制的情况下,文献[4]研究线性系统的参数估计问题.对于具有异步隶属度的网络化模糊控制系统,文献[5]给出具有更小保守性的稳定性及镇定条件.文献[6]讨论基于数据重构的连续时间网络控制系统故障检测滤波器设计问题.针对具有随机时延和丢包的基于序列的控制系统,文献[7]研究其稳定性问题.对于离散时间非线性网络控制系统,文献[8]考虑其模糊动态输出反馈控制器设计问题.针对采用非线性半马尔科夫跳变系统描述的认知无线网络,文献[9]研究其量化控制设计问题.文献[10]研究具有通信时延和数据丢包的网络化非线性系统的控制问题.针对一类连续时间网络控制系统,文献[11]研究基于事件驱动的故障检测滤波器设计问题.关于网络控制领域的其它最新研究成果,见文献[12-15].其中文献[1, 3, 5-8, 11,12]中系统的采样周期为常数.对于控制系统而言,通常期望传感器采用一个固定的周期进行采样.然而,计算机负载的变化、网络及非周期性的故障会导致采样周期发生变化.近年来,文献[16-20]考虑时变采样周期问题,对于网络控制系统而言,保证系统对于采样周期变化的鲁棒性是十分重要的.文献[21-22]研究网络诱导时延的非均匀分布特性,而文献[23]研究非均匀量化问题.事实上,对于具有时变采样周期的网络控制系统,其采样周期可能大部分时间内在一个区间内变化,而在较少的时间内在另外的区间内变化,即网络控制系统的时变采样周期也满足一定的非均匀分布特性.然而,文献[16-20]并未考虑非均匀分布的时变采样周期,且文献[19]没有考虑丢包问题,这也促使文中对相关问题开展研究.
文献[21-23]分析网络诱导时延或量化的非均匀分布特性.对于网络控制系统,丢包也可能是非均匀分布的.正如文中所证明,如果丢包的非均匀分布特性被用来处理向量交叉积放大不等式,可以得到更优的结果.然而,文献[21-23]并未考虑这一特性,文献[24]中的传感器网及文献[25]中的模糊神经网络与所研究的网络有本质的区别.
因此,文中研究具有非均匀分布时变采样周期网络控制系统的镇定控制器设计问题.在同时考虑非均匀分布的时变采样周期,网络诱导时延和丢包的基础上,建立新的状态反馈网络控制系统模型.构造基于丢包分解的Lyapunov泛函,得到新的镇定准则,同时提出了新的向量交叉积放大不等式,并通过推导证明所得不等式具有更小的保守性.
符号意义:MT为矩阵M的转置,I和0分别为具有适当维数的单位矩阵和零矩阵,E为数学期望,*为矩阵的对称部分.如果未特别说明,所有的矩阵都具有合适的维数.
1 非均匀采样网络控制系统建模
线性时不变系统为:
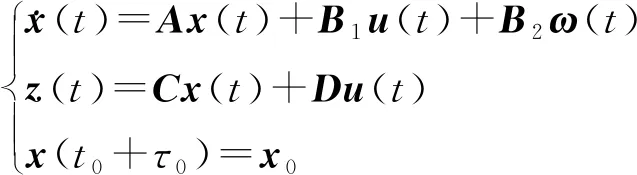
(1)
式中:x(t)∈Rn,u(t)∈Rm,z(t)∈Rr和ω(t)∈Rq分别为状态向量,控制输入向量,受控输出及扰动输入;x0∈Rn为初始条件;A,B1,B2,C和D为具有合适维数的已知常数矩阵.
文中假设传感器是时钟驱动,控制器和执行器是事件驱动;借助于网络实现对系统(1)的控制;传感器—控制器及控制器—执行器通道均存在时延和丢包;采样周期是时变且非均匀分布.
图1给出了同时考虑网络诱导时延和丢包的网络控制系统的时变采样模式,其中虚线表示相应的控制输入包被丢掉了,tk(k=0,1,2…)表示采样时刻.在时间区间[tk,tk+1)内,假设采样周期为常数.然而,在时间段[tk+1,tk+2)内的采样周期可能不同于时间段[tk,tk+1)内的采样周期.定义h(t)为采样周期的长度.不失一般性,考虑有两个采样周期h1和h2的情况,其中h1>h2>0.定义δ为连续丢包数的上界.

图1 时变采样模式Fig.1 Time-varying sampling mode
设τk为从传感器的采样时刻tk到执行器收到控制输入的时间长度,且0<τm≤τk≤τM.则
u(t)=Kx(tk)
(2)
式中:t∈[tk+τk,tk+1+τk+1),k=0,1,2…;K为将要设计的状态反馈控制器增益.
对于t∈[tk+τk,tk+1+τk+1),定义τ(t)=t-tk.则u(t)=Kx(t-τ(t)),且系统(1)可以转化成具有区间时变时延τ(t)的等价系统,其中τ(t)是人工构造的时延.在时间区间[tk,tk+1)内,如果采样周期是h1,定义τ(t)为τ1(t),如果采样周期是h2,定义τ(t)为τ2(t).考虑到τ(t)∈[τk,tk+1-tk+τk+1),得到τ1(t)∈[τm,(δ+1)h1+τM)且τ2(t)∈[τm,(δ+1)h2+τM).定义η1=(δ+1)h1+τM,η2=(δ+1)h2+τM.

(3)
定义随机变量λ(t)为:
(4)
利用Bernoulli分布的白序列来描述随机变量λ(t),得到:

(5)
如果考虑非均匀分布的时变采样周期,可得:
u(t)=Kx(t-τ(t))=
λ(t)Kx(t-τ1(t))+(1-λ(t))Kx(t-τ2(t))
(6)

(7)
则,系统(1)转化为:

(8)
式中:t∈[tk+τk,tk+1+τk+1)

B1Kx(t-τ2(t))
φ2(t)=B1K[x(t-τ1(t))-x(t-τ2(t))]

DKx(t-τ2(t))
φ4(t)=DK[x(t-τ1(t))-x(t-τ2(t))]
注释1:文献[16-20]研究网络化控制系统的时变采样周期问题,但未考虑时变采样周期的非均匀分布特性,且文献[19]没有考虑丢包问题.与文
献[16-20]相比,文中考虑时变采样周期的非均匀分布特性,因而所得结果更具有一般性.
注释2:由式(8)可见,文中考虑了非均匀分布的时变采样周期.事实上,如果选择λ(t)≡1或λ(t)≡0,式(8)将退化为具有常数采样周期h1或h2的情况.文中利用了采样周期的更多信息,因此考虑非均匀分布的时变采样周期可以得到更具有一般性的结果.
通过提出新的向量交叉积放大不等式,研究具有非均匀分布时变采样周期的网络控制系统的镇定控制器设计问题.新提出的放大不等式比现有的一些结果具有更小的保守性.
引理1[26]: 对于任意的对称正定矩阵M∈Rn*n, 标量r1 (9) (10) 则系统(8)在均方意义下渐近稳定,且相应的H∞范数界为γ,控制器增益K=VTW-1. 证明:考虑如下的Lyapunov泛函 V(t)=V1(t)+V2(t)+V3(t) (11) 式中:V1(t)=xT(t)Px(t) 且P,Q1,Q2,Q3,R1,R2,R3是对称正定矩阵. 2xT(t)Pφ1(t)+2xT(t)PB2ω(t) (12) Q3-Q1)x(t-τm)-xT(t-η2)Q2x(t-η2)-xT(t-η1)Q3x(t-η1) (13) (14) 式中:Θ1=τmR1+(η2-τm)R2+(η1-τm)R3,且 (15) 从引理1可以得到 (16) (17) 式中:φ1=x(t-τm)-x(t-τ2(t)),φ2=x(t-τ2(t))-x(t-η2). 类似的可以得到: (18) 式中:φ3=x(t-τm)-x(t-τ1(t)),φ4=x(t-τ1(t))-x(t-η1).经过合适的矩阵变换并利用Schur补引理,可以得到本定理的结果.证毕. 定理1考虑了时变采样周期的非均匀分布特性.事实上,如果考虑丢包的非均匀分布特性,可以得到具有更少保守性的结果. 假设丢包是非均匀分布的,其中丢包隐含在了τ1(t)和τ2(t)中,且τ1(t)和τ2(t)的统计特性为: (19) (20) 定义随机变量ρ1(t)和ρ2(t): (21) (22) 利用Bernoulli分布的白序列描述随机变量ρ1(t)和ρ2(t),可得: (23) (24) 如果考虑丢包的非均匀分布特性,式(17)转化为: (25) 式中:φ1=[x(t-τm)-x(t-τ2(t))], φ2=[x(t-τ2(t))-x(t-η2)]. 类似的可以得到: (26) 式中:φ3=x(t-τm)-x(t-τ1(t)),φ4=x(t-τ1(t))-x(t-η1). 结合定理1的证明以及式(25)和(26),可以得到以下改进的镇定准则. (27) 式中: 下面证明定理2比定理1具有更小的保守性. 推论1:如果定理1的镇定准则成立,则定理2的准则也是可行的. (28) 式中:Γ1为不等式(25)的不等号右侧值,且 (29) 式中:Γ2为不等式(26)的不等号右侧值, 且 注释4:从定理2可见,文中充分利用了丢包的非均匀分布特性来处理向量交叉积放大不等式,且定理2改进了定理1的结果.文献[21-22]考虑了网络诱导时延的非均匀分布特性,但是未考虑丢包的非均匀分布特性,也未利用该特性处理向量交叉积放大不等式.如果利用丢包的非均匀分布特性来处理向量交叉积放大不等式,则文献[21-22]中的结果可以进一步改进,相应的证明类似于定理2和推论1,此处略. 通过提出一个新的基于丢包分解的Lyapunov泛函,定理1和定理2的结果可以进一步改进.下面,对于系统(8),给出一个新的镇定准则. (30) 式中: (31) 则系统(8)均方渐近稳定,且相应的H∞范数界为γ,控制器增益K=VTW-1. 证明:限于篇幅,证明略. 注释5:从定理1、2、3可见,对于一些给定的标量,如果存在矩阵及标量,使得式(10),(27)及(30)不等式成立,可得到控制器增益K=VTW-1.利用Matlab线性矩阵不等式工具箱求解不等式(10)、(27)及(30),很容易地得到矩阵V及W的值,进而求出控制器增益K的数值解.对于已知的控制器增益K及非均匀分布的时变采样周期,可以计算得到式(6)中的控制输入u(t). 例1:考虑如下开环不稳定的网络控制系统 (32) 表1 对应不同的H∞范数界γTable 1 H∞ norm bound γ for different 表2 对应不同δ的H∞范数界γTable 2 H∞ norm bound γ for different δ 图2 扰动输入ω(t)的曲线Fig.2 Curve of the disturbance input ω(t) 图3 采样周期的切换顺序Fig.3 Switching sequence of sampling periods 图4 对象状态及受控输出曲线Fig.4 Curves of plant state and controlled output 文中研究了具有非均匀分布的时变采样周期,网络诱导时延和丢包的连续时间网络控制系统的镇定控制器设计问题.研究表明: (1) 所构造的基于丢包分解的Lyapunov泛函更具有一般性,且可以得到更容易实现的镇定准则. (2) 理论推导及仿真结果表明,在处理向量交叉积放大不等式时,利用丢包的非均匀分布特性可以得到具有更小保守性的结果. (3) 数值仿真验证了所提出的镇定控制器设计方法的有效性.2 状态反馈网络控制系统的镇定控制器设计






















3 仿真分析






4 结论
猜你喜欢
通信电源技术(2020年8期)2020-07-21
自动化学报(2019年12期)2020-01-19
电子制作(2019年23期)2019-02-23
中学生数理化·高二版(2017年3期)2017-07-07
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
电脑知识与技术(2016年31期)2017-02-27
现代防御技术(2016年1期)2016-06-01
建材发展导向(2016年3期)2016-05-23
中国铁道科学(2015年4期)2015-06-21
