
一种复合式6-SPS舰载抗冲稳定平台的机械结构设计及性能分析
2018-10-11 01:13孙石磊刘芳华王天泽
江苏科技大学学报(自然科学版) 2018年4期
孙石磊, 刘芳华*, 梁 伟, 王天泽
(1.江苏科技大学 机械工程学院, 镇江 212003)(2.沪东重机有限公司,上海 200129)
舰船在海上航行,当受到天气、海浪、非接触性爆炸等诸多不利因素影响产生多个自由度的摇荡干扰运动时,会给舰船上直升机的起降、武器发射精度、舰船通信、摄像、海上作业以及船员的工作、生活等方面造成了极为不利的影响[1-2].而并联稳定平台可使舰载设备相对惯性空间保持稳定.针对并联稳定平台诸多优点,国内外相关学者对此展开了大量的研究,其中国内研究如:南极考察船“雪龙”号上的“船载气象卫星云图接收系统”,采用了并联式稳定平台,提高了信号接收的准确度[3];由浙江大学研制一种并联四自由度4TPS/1PS稳定跟踪平台实验样机可实现5级海况下的稳定跟踪;中国电子科技集团26所研制一种具有船载、车载、机载3个系列的CWWP、CJWP三轴监视稳定平台系统[4];国外研究如:挪威AAS MEK公司以并联机构为主体机构研制了一种海上钻井设备,极大地提高了工作效率[5];德国以并联机构为底座研制一种100 m射电望远镜,实现了射电望远镜角度的精调[6].但目前研制的并联稳定平台大都是单一式的,虽然可使舰船多自由度的摇荡运动得到有效地补偿,但面对高频率、大幅度的摇荡运动时补偿效果不佳.所以研制一种可应对高频率、大幅度摇荡运动,能同时实现抗冲、稳定的并联式稳定平台极为重要.
针对单一式并联舰载稳定平台存在的不足,文中设计了一种新型的复合式6-SPS舰载抗冲稳定平台(下文简称“抗冲稳定平台”),基于主要构件的设计,分析该抗冲稳定平台的抗冲效果和稳定效果,得出该机构可有效地应对高频率、大幅度的摇荡运动,能同时实现抗冲、稳定的目的,为抗冲稳定平台后续的动力学分析及高精度控制系统的设计提供了重要的依据.
1 抗冲稳定平台的机械结构设计
抗冲稳定平台机械结构的设计主要包括主动式稳定平台的设计和被动式减振平台的设计.被动式减振平台主要实现抗冲的目的,包括主体机构、弹性元件、可控阻尼几个部分.主动式的稳定平台主要实现稳定的目的,由主体机构、液压装置、传感器、控制系统和信息处理部分组成.减振平台和稳定平台上下串联,下平台与舰船固联,上平台作为舰载设备的承载平台.
1.1 主体机构的选择
主体机构的选择在机构的设计中具有极为重要的地位,它是整体机构的骨架,是主要运动的传递者和载荷的承担者,直接决定了整体机构的工作效果.
以并联机构作为抗冲稳定平台的主体机构,主要目的是能应对高频率、大幅度的摇荡运动,可实现多维减振.当下平台受到干扰刺激信号经过各支链反向传递到中平台和上平台的过程中,各支链中的弹簧阻尼系统和液压驱动系统会吸收能量并进行动力自适应平衡.因此要求主体机构传力性能好,正反向传动效率高且不能同时发生自锁,且结构简单便于解耦、易于控制和分析、制造等[6-8].最后根据需要确定机构的自由度数.
根据抗冲稳定平台的设计要求,择优选择了几种合适的机型后,针对其耦合度和抗冲效果进行了分析,并最终确定主体机构的机型如图1.

图1 Stewart并联机构Fig.1 Stewart parallel mechanism
图1中的Stewart机构由6条-S—P—S-单开链组成,在平衡位置时每条支链都和上、下平台铰点的连线组成近似的等边三角形.且根据耦合度的计算方法求得该机型的耦合度为1,较其他Stewart机型耦合度都小.其中,耦合度k计算方法[9]如下:
(1)
式中:v为SOC单开链的个数;Δj为第j个SOC单开链对机构的约束度.
(2)
式中:mj为第j个SOC单开链的运动副数;fj为第j个运动副的自由度数;Ij为第j个SOC单开链的主动副数;ξj为第j个SOC单开链构成的所有可能回路中的秩的最小值.
1.2 主要构件的设计
根据机械结构设计准则,机构的设计在满足要求的同时要便于加工,并符合相应的装配关系.
1.2.1 球铰链的设计
球铰链的运动性能对整个机构具有决定性的作用,结构如图2,主要包括球颈、球铰盖和球铰座3个部分.球颈可通过预设的孔伸入球铰盖中,球铰盖、球铰座与平台通过螺栓联接,球颈与相应的连杆通过螺纹联接.该球铰链的设计在满足了使用要求的同时便于加工和装配.

图2 球铰链的结构Fig.2 Structure of spherical hinge
1.2.2 隔冲器和液压驱动杆的设计
隔冲器是被动式减振平台发挥作用的主要部分,也是整体机构能否应对高频率、大幅度摇荡运动的决定性结构.文中设计的隔冲器基本满足机构的工作要求,符合相应的设计准则,其剖视图的结构如图3.隔冲器上、下杆可构成在一定范围内自由伸缩的伸缩杆.下杆中设有弹簧阻尼系统,阻尼缸内根据实际需求设置相应的阻尼介质.可供上杆穿过的端盖,与下杆通过螺纹联接.上杆接近中间位置有一段圆形凸台,主要作用是压缩弹簧.根据要求合理地选择弹簧的刚度系数和阻尼介质,可使机构更好的发挥作用.

图3 隔冲器剖视图的结构Fig.3 Structure of every punch sections
选择合适型号的液压驱动元件,搭建相应的液压驱动杆,结构如图4.液压驱动杆的上、下杆可构成在一定范围内自由伸缩的伸缩杆,通过球铰链分别与上、中平台相联.位移传感器和压力传感器主要作用是反馈液压缸的位置信号和缸内液压油的压力信号.

图4 液压驱动杆的结构Fig.4 Structure of hydraulic drive
1.3 机构的总成
图5是抗冲稳定平台的总成图.为了安全起见,在被动式减振平台中间加设过冲击保护装置,该过冲击保护装置内部同样设有弹簧阻尼系统,上杆通过万向节与中平台相联,下杆与下平台固联.当发生高频率、大幅度的摇荡运动时,对机构整体具有一定的保护作用.

图5 抗冲稳定平台的总成图Fig.5 Diagram of resistance and stabilized platform
抗冲稳定平台整个工作过程可分为被动减振和主动稳定两大工步,其中主动稳定采用交叉耦合控制的思想[10],当船舰受到外界干扰时,机构与船舰固联的下平台会随船舰产生相应的摇荡运动.下平台传来的位姿信号经过被动式减振平台传到中平台时频率和幅度已大大降低,此时与中平台和上平台固联的惯性测量组件会实时将中平台和上平台的位姿信号传到上位机,上位机发出信号控制6个液压缸联动,间接的控制上平台稳定,机构的控制原理如图6.

图6 抗冲稳定平台的控制原理Fig.6 Control principle diagram of resistance andstabilized platform
2 抗冲、稳定性能分析
文中针对设计的抗冲稳定平台进行多方向抗冲性能及稳定性能的分析.首先在Creo2.0中建立精确的模型,并将三维模型导入Adams建立抗冲稳定平台的虚拟样机,对其添加相应的约束,忽略摩擦力的影响,在被动式减振平台相应的运动副上添加合适的弹簧刚度系数(柔性链接)和阻尼系数.在主动式稳定平台相应的运动副上添加合适的驱动函数从而比较精确地仿真出机构多方向的抗冲、稳定性能[11-14].与仿真和建模相关的部分参数如表1.

表1 多方向减振、稳定效果仿真及部分建模参数Table 1 More direction effect of shock absorption、stability simulation and some modeling parameters
2.1 抗冲性能分析
借助Adams虚拟样机强大的仿真和测量功能,采用动力学逆解法,保证上平台不动,对下平台施加相应的冲击载荷,得到的6个液压缸的位移函数以样条函数“splinei”的形式导入Adams中,并将驱动函数定义为:
Motioni:CUBSPL(time,0,splinei,0)
设仿真时间t=1 s,仿真步数Steps=1 000步.文中坐标系为Adams环境下的坐标系,Y轴位于竖直方向,抗冲稳定平台虚拟样机模型如图7.

图7 抗冲稳定平台虚拟样机模型Fig.7 Virtual prototype model of resistance and stabilized platform
选取平行于下平台(横向冲击载荷)、垂直于下平台(纵向冲击载荷)和绕X轴(X轴平行于下平台)3个方向进行抗冲、稳定性能的验证.在3个方向上施加的冲击载荷形式如图8.施加的冲击载荷给抗冲稳定平台模拟了一种高频率、大幅度的摇荡运动.
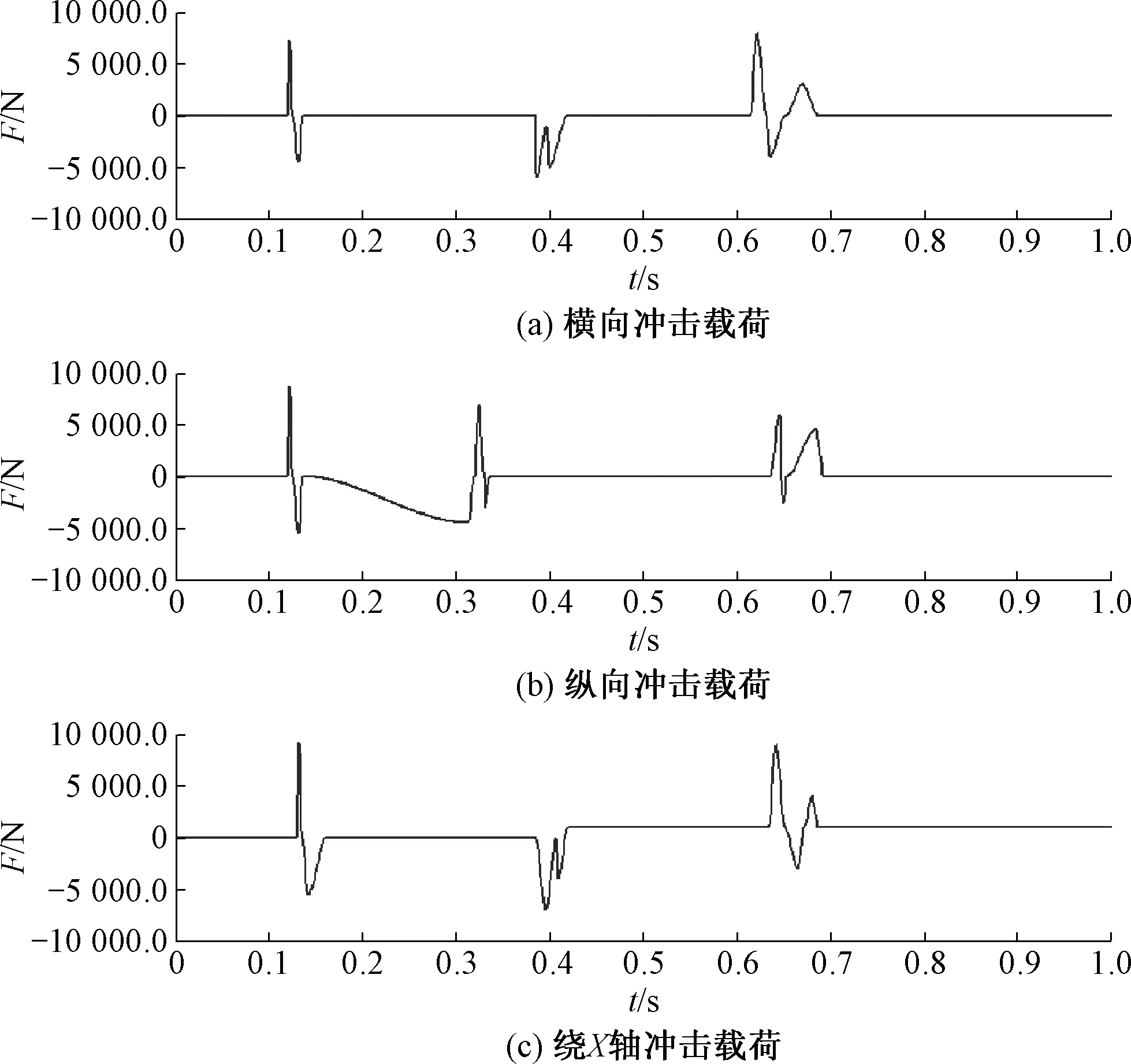
图8 横向、纵向和绕X轴冲击载荷形式Fig.8 Lateral、longitudinal and around the X axis forms of impact load
从单独施加3个方向的冲击载荷和同时施加3个方向的冲击载荷对舰载抗冲稳定平台的性能进行分析.
(1) 单独施加纵向冲击载荷时抗冲性能分析.
如图9(a)中,单独施加纵向冲击载荷时抗冲稳定平台沿Y轴方向,下平台加速度波动幅度很大,而中平台相对下平台加速度的波动幅度较小.下平台最大加速度为185 m/s2,中平台对应的加速度约为18.5 mm/s2,减振倍率接近10倍,效果明显;图9(b)中,下平台绕X轴、Y轴和Z轴的角加速度波动较大,而中平台的角加速度沿X轴、Z轴在0附近波动,且趋于平缓,沿Y轴有较大幅度波动,但相比下平台绕Y轴的角加速度也有减小.
(2) 单独施加横向冲击载荷时抗冲性能分析.
如图10(a)中,单独施加横向冲击载荷时抗冲稳定平台沿X轴方向,下/中平台加速度波动幅度都较大,但中平台的波动幅度相对下平台已减缓;图10(b)中,下平台绕X轴、Y轴和Z轴的角加速度波动较大,而中平台的角加速度绕X轴、Z轴在0附近波动,且趋于平缓,绕Y轴有较大幅度波动,但相比下平台绕Y轴的角加速度也有减小.
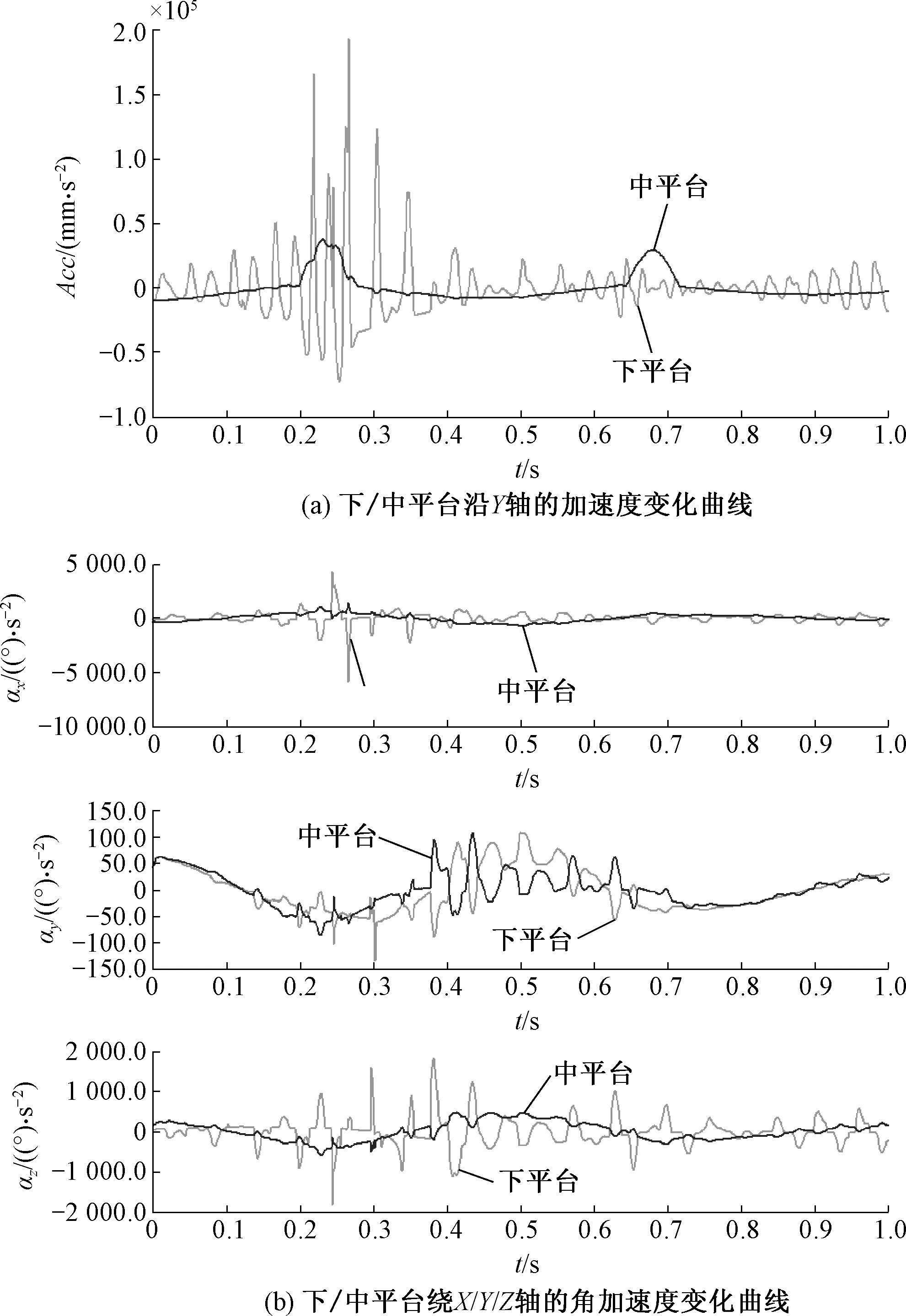
图9 单独施加纵向冲击载荷下/中平台相关参数变化曲线Fig.9 Related parameters change curve of separately applied to longitudinal impact load for the down/ middle platform

图10 单独施加横向冲击载荷下/中平台相关参数变化曲线Fig.10 Related parameters change curve of separately applied to transverse impact load for the down/ middle platform
(3) 单独施加绕X轴方向冲击载荷时抗冲性能分析.
如图11,单独施加绕X轴冲击载荷时,下平台绕X轴角加速度波动幅度较大,中平台的角加速度在零附近波动且趋于平缓,下平台的最大正角加速度为3 000°/s2,中平台对应的角加速度为150°/s2,减振倍率接近20倍,效果明显.

图11 单独施加绕X轴冲击载荷时下/中平台角加速度变化曲线Fig.11 Related parameters change curve of separately applied to around X axis impact load for the down/middle platform
(4) 同时施加横向、纵向和绕X轴3个方向冲击载荷时抗冲性能分析(图12).

图12 同时施加横、纵向和绕X轴冲击载荷时下/中/上平台相关参数变化曲线Fig.12 Related parameters change curve of together applied to longitudinal/ transverse and around X axis impact load for thedown/middle platform
如图12(a)中,同时施加横/纵向和绕X轴方向冲击载荷时,抗冲稳定平台沿X轴方向,下/中平台加速度都有较大幅度波动,但由于减振平台的作用,中平台的加速度波动幅度相对下平台有所减缓.沿Y轴方向下平台加速度幅度波动较大,中平台的加速度波动趋于平缓,下平台最大加速度为100 m/s2,中平台对应的加速度为10 m/s2,减振倍率接近10倍,效果明显;图12(b)中,下平台绕X轴、Y轴和Z轴的角加速度波动较大,而中平台的角加速度绕X轴、Z轴在零附近波动,且趋于平缓,绕Y轴有较大幅度波动,但相比下平台绕Y轴的角加速度也有减小.
综上所述,该抗冲稳定平台在Y轴方向抗冲效果明显,减振倍率接近10倍,在X轴方向相对Y轴方向抗冲效果较弱;整个机构在转角方面有良好的抗冲效果,减振倍率可达20倍.
2.2 稳定效果分析
对于抗冲稳定平台稳定性能的分析,从同时施加横向、纵向和绕X轴3个方向冲击载荷,不采用任何控制算法时,对上平台的姿态角变化规律进行研究.根据上平台姿态角的变化规律得出该抗冲稳定平台的稳定效果.图13为液压缸的驱动函数曲线图,图14为不采用任何控制算法时上平台绕X/Y/Z轴的姿态角的变化曲线.

图13 液压缸驱动函数曲线图Fig.13 Drive function curve of hydraulic cylinder

图14 上平台沿X/Y/Z轴姿态角变化曲线Fig.14 Angle change curve along the X/Y/Z axis attitude for the up platform
如图14,同时施加3种冲击载荷且不采用任何控制算法时,上平台绕X轴的最大正转角为7.51°,最大负转角为1.19°;绕Y轴的最大正转角接近0°,最大负转角为3.25°;绕Z轴的最大正转角为0.52°,最大负转角为5.13°.绕3个坐标轴的转动幅度保持在10°之内,与舰船的转动幅度相比已减少很多,稳定效果明显.
为了增加可信度,对舰船在正常行驶(受舰船环境及正常波浪冲击影响)时抗冲稳定平台的工作状况进行分析.给下平台施加一组波浪模拟信号,在未采用控制算法时上平台的姿态变化情况如图15.
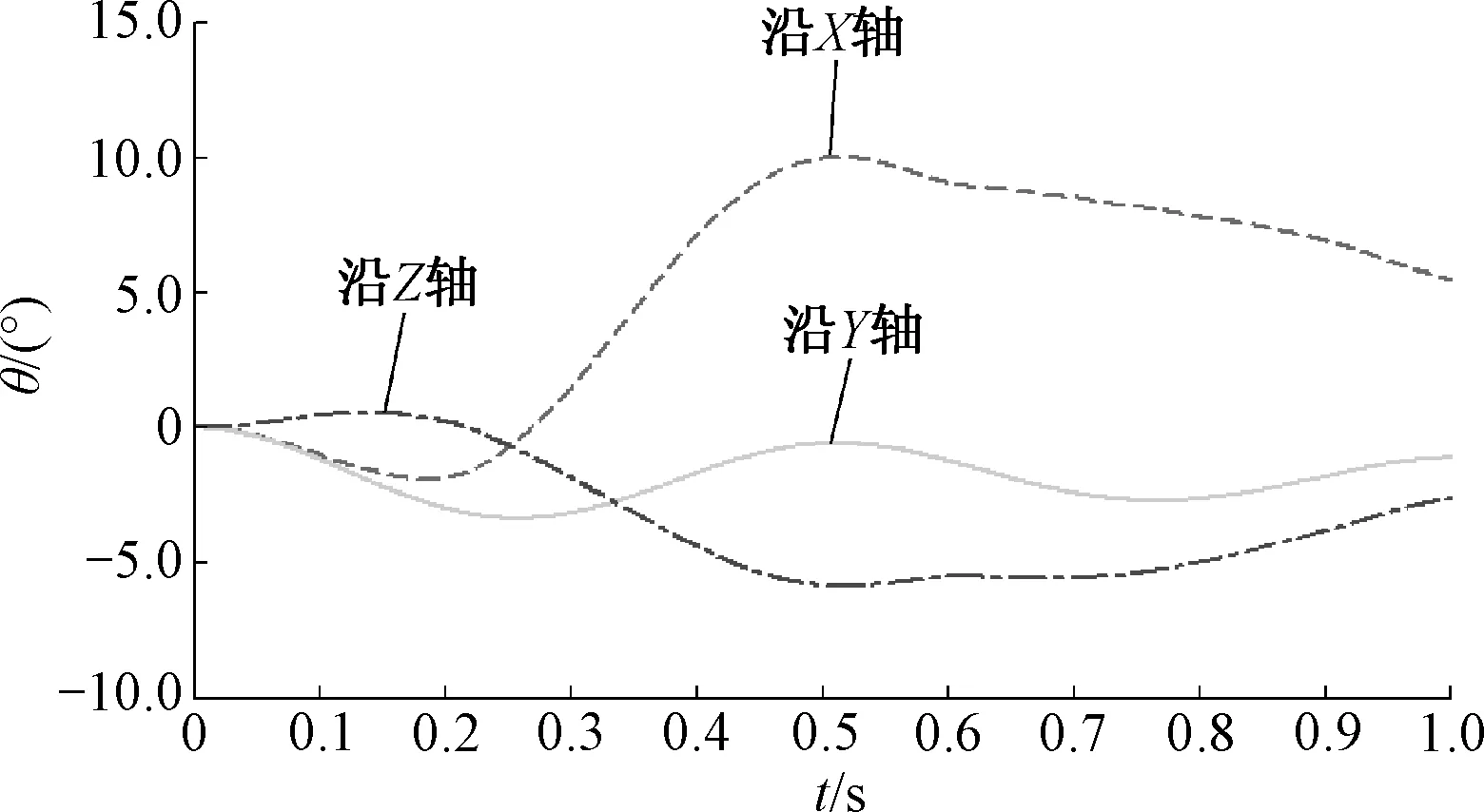
图15 未加大冲击时上平台沿X/Y/Z轴姿态角变化曲线Fig.15 Angle change curve without largeimpact along the X/Y/Z axis attitude for the up platform
由图15可以看出,在只受舰船环境及正常波浪影响时,抗冲稳定平台的转角范围基本保持在10°左右,与受到大冲击载荷时的运动状况接近,进一步说明了该抗冲稳定平台抗冲、稳定效果良好.
3 结论
(1) 针对单一式并联舰载稳定平台存在的缺陷,设计了一种新型的复合式舰载抗冲稳定平台,并详细地介绍了该抗冲稳定平台主要构件的设计.
(2) 基于Adams建立抗冲稳定平台的虚拟样机,分析其下/中平台的运动情况,研究机构的抗冲性能和稳定性能,得出结论:沿Y轴方向(竖直方向)的减振倍率可达10倍,沿X轴方向(水平方向)抗冲效果相对Y轴方向较差,在转角方面的减振倍率可达20倍;不采用任何控制算法时,上平台绕X轴、Y轴、Z轴的转动幅度保持在10°之内,稳定效果明显.文中分析结果为后续动力学分析和高精度控制系统的设计提供了重要的依据.
猜你喜欢
今日农业(2019年12期)2019-08-13
电子技术与软件工程(2019年5期)2019-06-20
中国外汇(2019年23期)2019-05-25
文学少年(原创儿童文学)(2019年1期)2019-05-23
中国化肥信息(2019年3期)2019-04-25
新课程·下旬(2018年10期)2018-01-28
科学与财富(2018年34期)2018-01-15
中国塑料(2016年1期)2016-05-17
中国塑料(2015年11期)2015-10-14
中国塑料(2015年8期)2015-10-14
