智能装备产品的系统的开发
2018-09-22 04:15:52梁勇东叶文斌钟键东莞理工学院机械工程学院曾志彬吴国洪东莞市横沥模具科技产业发展有限公司陈学忠广东石东实业集团公司
数码世界 2018年8期
梁勇东 叶文斌 钟键 东莞理工学院机械工程学院 曾志彬 吴国洪 东莞市横沥模具科技产业发展有限公司 陈学忠 广东石东实业(集团)公司
1 前言
在工业自动化生产中,无论是单机还是组合机床,以及自动生产流水线,都要用到机械手来完成物体的取放。机械手在自动化生产中的优势是十分明显的,可以部分代替人工操作,从而减少人工成本,提高生产效率;其次可以按照设定好的程序,实现对于部件的传输和装卸,持续工作,而且精度高,一般不容易出现误差,相比于人工操作更加精确;还有,其安全性好,对于一些危险性较大的工序,进行施工时,由于不需要进行人工操作,因此可以有效保证,人员安全,减少意外事故的发生。
其中就有利用机械手搬运大件货物,目前,搬运大件货物(如大型纸箱)的机械手大多数采用吸盘把货物提起从而进行搬运的方式,然而,容易发生吸不住,提不起来的现象,并且在吸放的重复性动作中,真空吸盘容易老化,需要时常更换真空吸盘,对于大规模使用吸盘机械手搬运货物的环境,时常更换真空吸盘极大影响了工作效率。然而,企业往往需要运行更可靠,效率更好的货物夹持器。
在自动生产线中,各种型式的机械手应用越来越广泛。现代的机械手采用各种电气、机械、液压、气动传动机构,并用电子系统进行控制,以实现模仿人的手臂和手指动作,而其手爪的结构也是各式各样。根据上述情况,手爪方式更适合大件货物的夹持,手爪的设计是各型式的机械手重点,通常的夹持手爪是通过直接使用气动推动,但该方法在大件货物中较为不稳定,偶尔出现卡物的情况,违背了公司对夹持器运行可靠,效率好的要求。因此有必要设计一款适合大件货物搬运的机械手。
针对以上问题,本文提出了一种基于PLC在智能装备领域的应用示范的设计方案,大致为将气缸的末端与手爪的一侧连接,利用一个气缸驱动,并通过光轴与滑块、一个齿轮两平行齿条的传动方式,实现手爪的两侧同步动作,夹持货物。下文将具体从机构设计方面与控制方面进行阐述。
2 设计
根据目标功能,本文所设计的应用于夹持大件货物的手爪,在机构上分别从驱动部分、传动部分和执行部分三方面进行设计。驱动部分包括有气缸,该气缸是一种直线推杆气缸,气缸水平设置在手爪基体的上侧方,通过气缸固定件连接手爪基体,手爪基体是机械手的最基本结构,气缸固定件由一块角铝连接水平设置的铝板组成,角铝固定连接直线推杆气缸,铝板与手爪基体连接,进一步与角铝连接,从而固定直线推杆气缸。
传动部分包括有缸爪连接件(连接直线气缸与手爪的零件)、手爪固定板、光轴滑块、齿条、齿轮。其中缸爪连接件设置于气缸输出轴的末端,同时在手爪基体的左侧,进一步连接手爪固定板,气缸动作时缸爪连接件随着气缸产生相对于手爪基体的移动,手爪固定板设置于两个光轴滑块的下表面,从而手爪固定板可随气缸移动。光轴与光轴滑块配套使用,总设计样式为四根光轴、四个光轴滑块,并且为两行两列分布式,其中一根光轴通过两个光轴支座固定在手爪固定板的下表面,光轴与滑块辅助于手爪产生相对运动。手爪固定板设置在手爪基体的下表面,进一步的齿条设置在手爪固定板的下表面,左右两根齿条围绕齿轮平行设置,实现两齿条相对运动。齿轮是一种带轴承的齿轮,与齿条一同设置在定位板的上表面,定位板起着支撑两条齿条的作用。定位板设置与齿轮轴连接,并设置于齿轮的下表面,齿轮与齿轮轴套合使用,齿轮轴设置在固定板的下方,两者通过齿轮固定件固定连接;齿轮轴固定不旋转,齿轮自带轴承可旋转。手爪基体的上表面设置了通孔,用于与机械手主体连接。执行部分包括手爪,手爪设置在手爪固定板的下方,手爪呈L型,用于夹持货物。
本文所设计的手爪可跟生产线的其他自动化设备一起使用,通过手爪基体的通孔连接至机械手末端,该手爪的气缸通过进出气口与气动电磁阀连接,进一步的,气动电磁阀的com端与PLC的输出端电连接,气动电磁阀的常开端与+24V电连接。PLC控制器按顺序指令执行,当PLC向气动电磁阀的com端的输出状态改变时,气体进入气缸的方式改变,气缸动作,通过缸爪连接件带动左边的手爪固定板运动,进而带动与左边的手爪固定板连接的齿条运动,配合齿轮的传动,实现左右两平行设置的齿条相对运动,结合光轴的导向作用,实现手爪的相对运动,从而可夹持货物。具体运动方式为,气缸缩短时,通过缸爪连接件带动左侧手爪向右移,进一步带动左齿条向右移动,在啮合的作用下,齿轮产生顺时针转动,并且带动右齿条往左移动,右侧手爪也同步地向左移动,机械手处于夹取状态。由于左齿条与右齿条的齿距相同,因此左齿条与右齿条是同步动作的,并且保持着两个齿条的中心与被夹取的物体的中心重合,有利于物体的定位。气缸伸长时,通过缸爪连接件带动左侧手爪向左移,进一步带动左齿条向左移动,在啮合的作用下,齿轮产生逆时针转动,并且带动右齿条往右移动,右侧手爪也同步地向右移动,机械手处于张开状态。
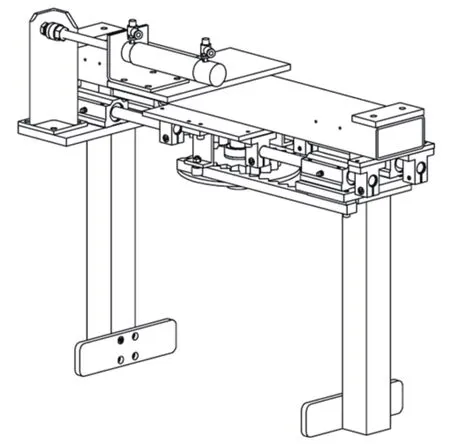
图1 机构设计图
3 结语
本文所做的工作为:根据功能的要求对移动机器人进行了结构设计和控制系统设计。本文所设计的应用于夹持大件货物的手爪只用一个气缸进行驱动,控制方式简单,使用齿轮齿条传动方式,安装方便,并且,一个齿轮两平行齿条的传动方式,直接使得机械手末端的中心与货物的中心在同一垂直面上,容易定位,为机械手的运动定位提供了便捷,符合企业所需要的安装方便,控制简单等特点。
猜你喜欢
中国交通信息化(2022年12期)2022-02-11 12:05:14
摄影之友(2020年12期)2020-12-23 09:39:39
水运工程(2020年2期)2020-02-26 06:28:38
物流技术与应用(2019年6期)2019-07-16 08:14:52
电子制作(2018年24期)2019-01-03 02:30:30
荣誉杂志(2017年7期)2017-08-23 08:05:59
水利科技与经济(2016年7期)2016-04-25 13:03:04
重型机械(2016年1期)2016-03-01 03:42:07
机械工程师(2014年12期)2014-12-23 06:44:04
应用光学(2014年3期)2014-06-01 03:37:36