
一阶惯性大时滞系统Smith预估自抗扰控制
2018-09-19 01:04王永帅陈增强孙明玮孙青林
智能系统学报 2018年4期
王永帅,陈增强,2,孙明玮,孙青林
(1. 南开大学 计算机与控制工程学院,天津 300350; 2. 天津市智能机器人重点实验室,天津 300350)
时滞系统广泛存在于现代过程控制工业中,例如冶金、化工、炼油等工业。一般认为纯迟延时间与过程的时间常数T之比大于0.3则说明该过程是具有大迟延的工艺过程。滞后时间越大,系统越难控,而且对控制品质极为不利,因此,大时滞系统受到了理论和应用领域的广泛关注。O.J.M.Smith[1]于1957年提出了著名的针对纯滞后系统的Smith预估器[2-3],有效解决了控制量不能及时作用于被控对象的问题。但是,Smith预估器不具备任何抑制扰动的能力,当存在外界干扰时,控制性能将会大大下降。由此出现了自适应控制[4-5]、预测控制算法[6-7]、鲁棒控制算法[8]和各种智能算法等[9-10]。但是只能解决时滞时间较小的控制问题。
20世纪80年代末,韩京清研究员提出了自抗扰技术,由于能够实时估计和补偿扰动,受到了控制领域的广泛关注,并成功应用于各种不确定系统。针对时滞系统,韩京清[11]研究员提出了无视时滞法、一阶惯性环节近似法、输入预测法和输出预测4种方法,但是随着时滞增大控制效果变差。由于自抗扰技术的各种实用优点和需调参数太多等原因,美国克利夫兰州立大学的高志强教授[12]提出了线性自抗扰方法,大大简化了调参工作量,而且线性自抗扰的分析相对容易,现在已经有很多文献对此进行了理论分析[13-16]。
因此,将具有实时估计补偿扰动能力的线性自抗扰技术与解决纯时滞问题的Smith预估器相结合,来解决大时滞系统的控制问题。已有学者进行了一些相关研究,文献[17]在模型大约已知的条件下,将ADRC-Smith与基于时滞的扰动补偿观测器、PI-Smith在鲁棒性能和抗扰能力方面进行了比较,并进行频域分析,说明了ADRC-Smith控制性能更好,并对化学反应器浓度控制进行了仿真测试,对锅炉的氧浓度控制进行了仿真测试和实际结果的对比;文献[18]分析了ADRC-Smith的性能,并通过改进差分算法整定控制参数,最后与ADRC、PI-Smith、PI 3种控制器进行仿真比较。
在上述基础上,本文研究了在被控对象准确已知和大约已知两种情况下,LADRC-Smith控制方法的稳定条件和Smith预估器参数选择问题,通过MATLAB仿真进行了验证,并仿真分析了参数摄动对系统各个性能指标的影响。
1 线性自抗扰的基本原理
线性自抗扰以线性扩张状态观测器(linear extended state observer,LESO)为核心,包含了状态和扰动估计、误差反馈和扰动补偿几部分,结构如图1所示。
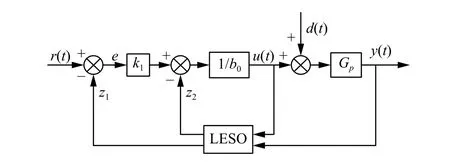
图 1 一阶系统线性自抗扰控制结构Fig. 1 Diagram of LADRC for first-order systems
下面以一阶系统为例,假定不含时滞的一阶被控对象用微分方程表示为

式(1)所描述系统的状态方程为

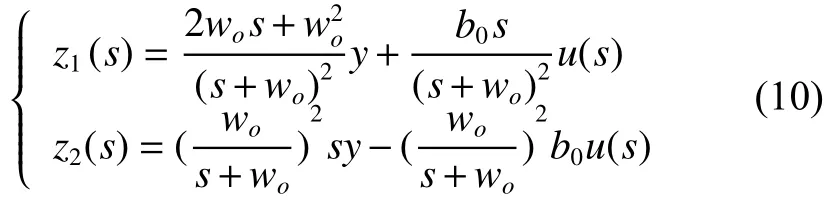
根据式(2)设计的线性扩张状态观测器为



2 大时滞系统的LADRC-Smith设计
通常,一阶大时滞被控对象的数学模型为



Smith 预估器原理结构图如图2所示。
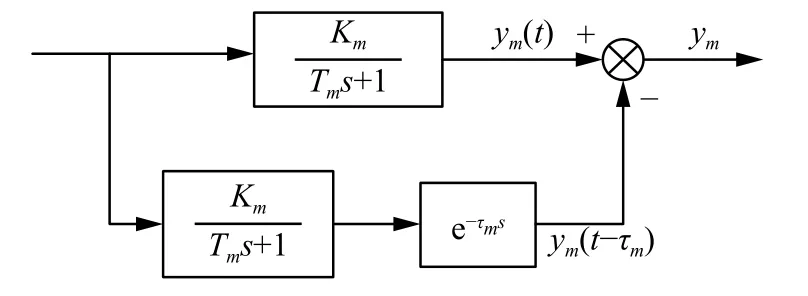
图 2 Smith预估器结构Fig. 2 Diagram of Smith predictor
这样,当Smith预估器参数与被控对象相同时,进入LESO的被控输出,和在时间上同步,从而得到一阶系统的整个LADRC-Smith结构图如图3所示。
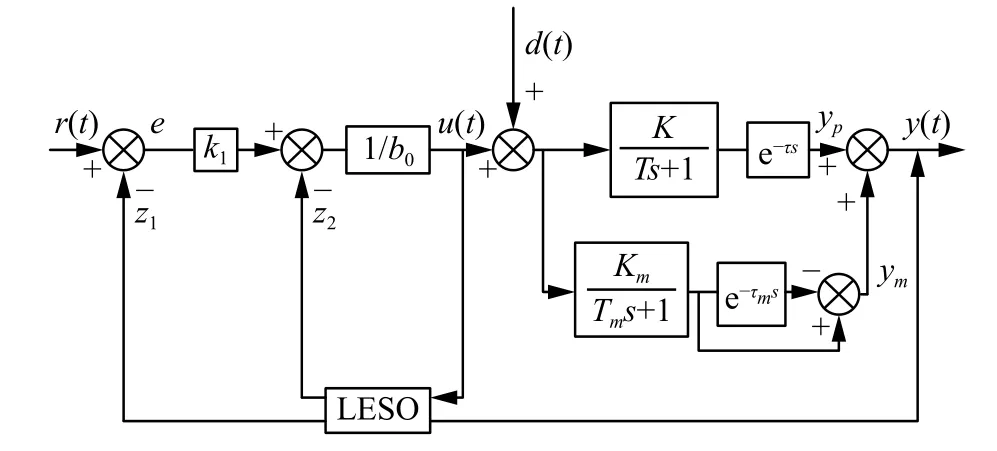
图 3 LADRC-Smith系统结构Fig. 3 Diagram of the LADRC-Smith system
3 稳定性分析
根据式(3)和式(5),可以得到表达式:

结合状态误差反馈控制率式(4),可以得到系统的典型单回路反馈控制结构框图如图4。
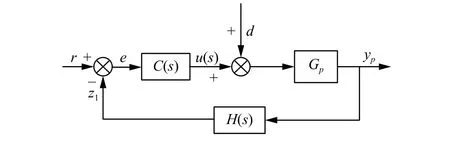
图 4 LADRC-Smith单回路结构Fig. 4 The single loop diagram of LADRC-Smith
其中:
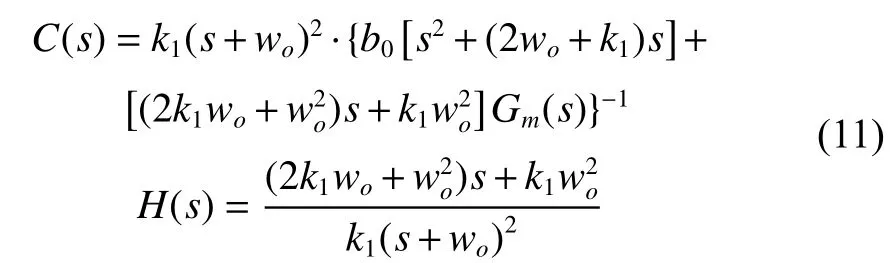
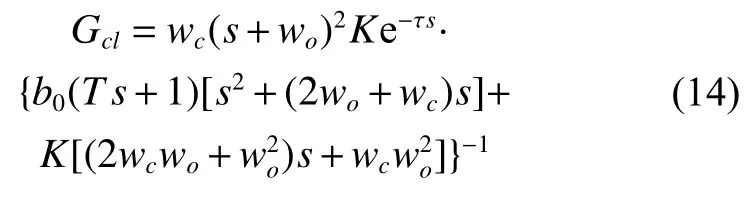
从而可以得到系统的开环和闭环传递函数:

3.1 条件分析
下面从被控对象模型准确已知和大约已知两个方面分析LADRC-Smith的条件稳定性。
3.1.1 被控模型准确已知
命题1 当被控对象模型准确已知时,Smith预估器与被控模型参数完全相同,只要3个控制参数为正,系统输出是稳定的。
证明
只有分子中包含时滞,不会影响系统的最终稳定性,因此可以利用劳斯判据对系统特征方程进行稳定性分析[19]。


证毕。
3.1.2 被控模型大约已知
假设:

证明
闭环特征方程为
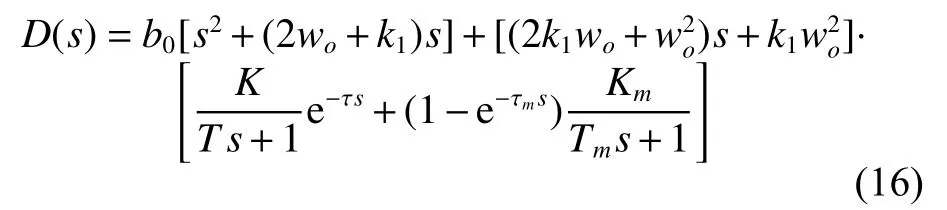
对被控系统特性进行仿真发现,针对大惯性环节 ,当时间常数T摄动较小时(即),和输出非常接近;当较小时,可以进行Taylor展开,但对于大时滞对象,Taylor展开不适用,而Pade近似更精确。所以,为了能够定性分析,作如下近似:


从而,式(16)可以转化为

式中

根据劳斯判据,定性得到了一个近似的稳定充分条件:

证毕。
3.2 仿真验证
3.2.1 Smith预估器参数与被控对象相同
由图5可以看出,当Smith预估器的参数与被控对象完全相同时,只要3个被调参数为正,系统输出最终是稳定的,但是动态过程跟参数选择十分密切,参数调节与性能关系将在下面讨论。
3.2.2 Smith预估器参数与被控对象不同
当Smith预估器参数与被控对象参数不相同时,按照命题2的近似充分条件选择Smith预估器参数,控制参数随意给定,然后进行仿真验证,如图6所示。
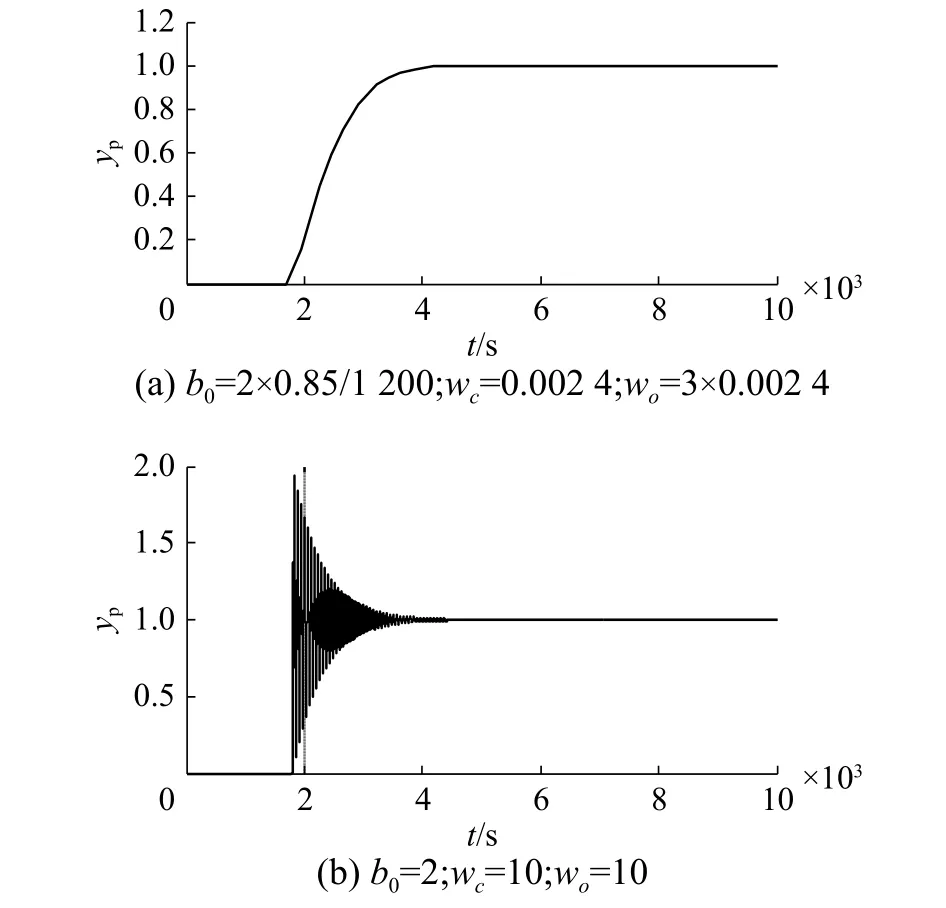
图 5 被控对象准确已知时的阶跃响应Fig. 5 Step response when plant is accurately known
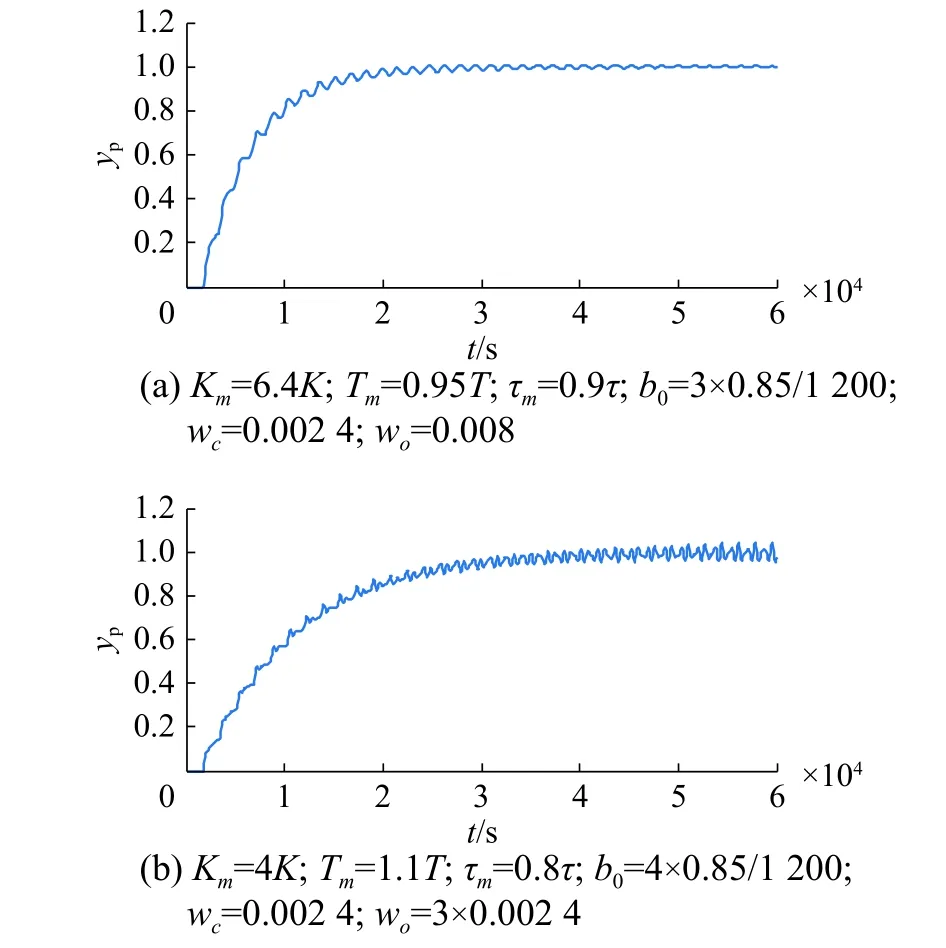
图 6 被控对象大约已知时的阶跃响应Fig. 6 Step response when plant is approximately known
可以看出,当Smith预估器参数与被控对象不相同时,根据命题2选择参数,由于是近似条件,系统最终可能不稳定,与控制参数选择也相关,所以,命题2有一定的局限性,但也有一定的参考意义,控制参数与性能的关系将在下面分析。
4 参数分析与设计原则
4.1 系统参数
Smith预估器参数为


图 7 LADRC-Smith奈氏曲线图Fig. 7 Nyquist diagram of LADRC-Smith
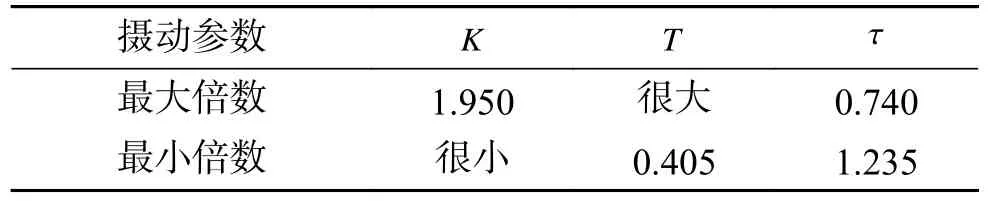
表 1 被控对象参数摄动的稳定边界值Table 1 Stable boundary when parameters perturbation
4.1.1 K变化对系统的影响
如表2和图8可以看出:
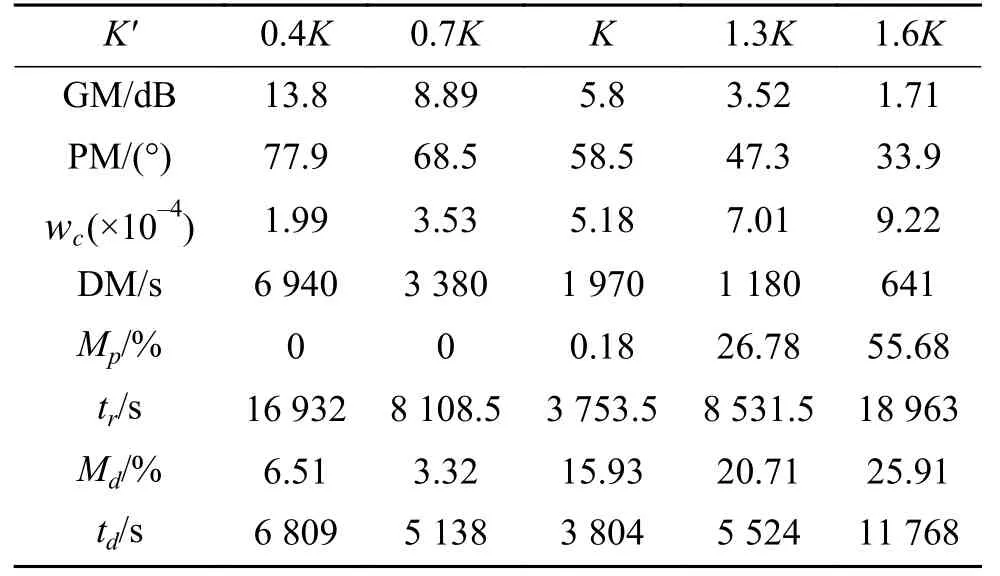
表 2 K变化的性能指标Table 2 Performance index when K changes
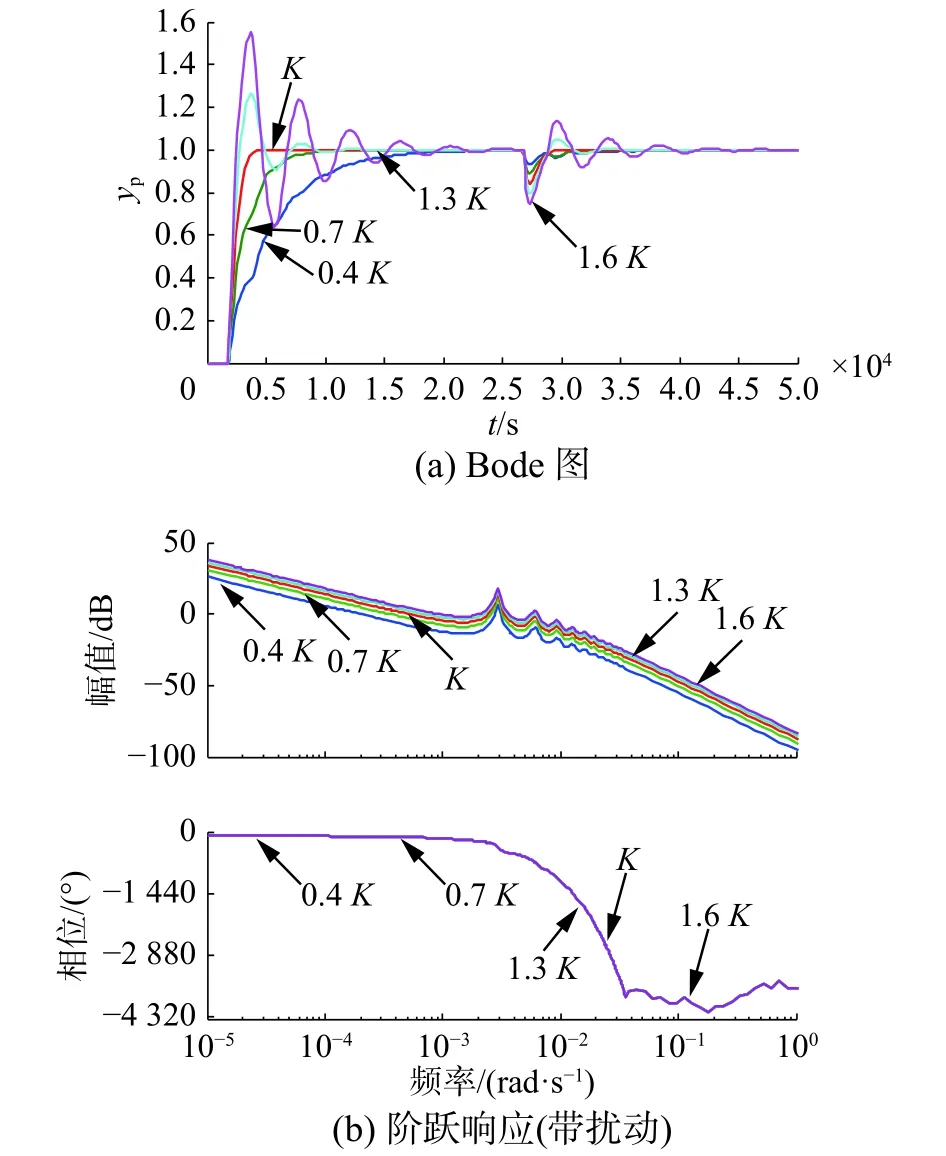
图 8 K变化的阶跃响应(带扰动)和Bode图Fig. 8 Step response with disturbance and Bode diagram for K
如表3和图9可以看出:
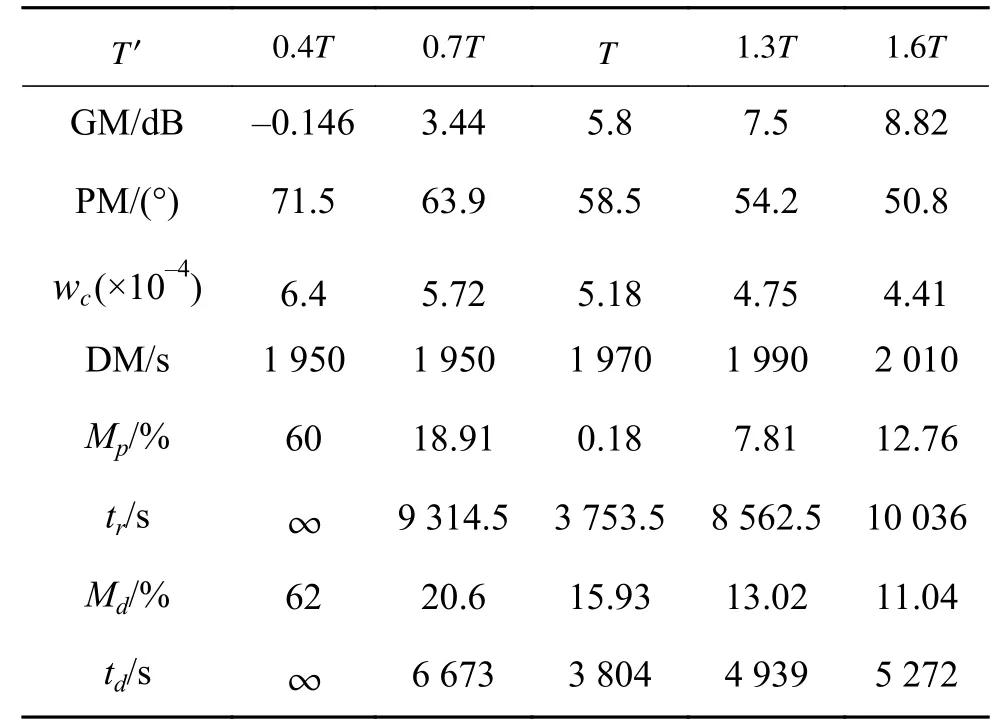
表 3 T变化的性能指标Table 3 Performance index when T changes
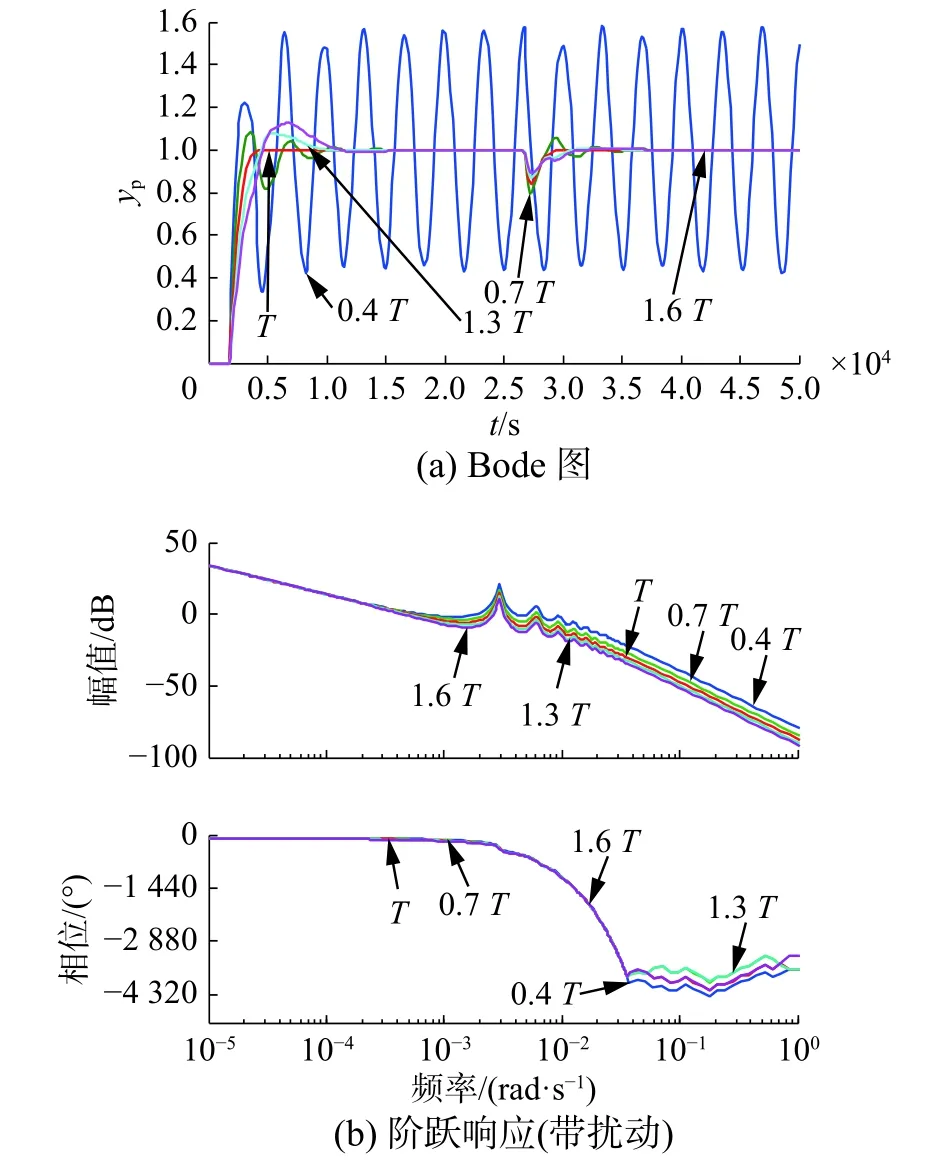
图 9 变化的阶跃响应(带扰动)和Bode图Fig. 9 Step response with disturbance and Bode diagram for
如表4和图10可以看出:
表 4 变化的性能指标Table 4 Performance index when changes
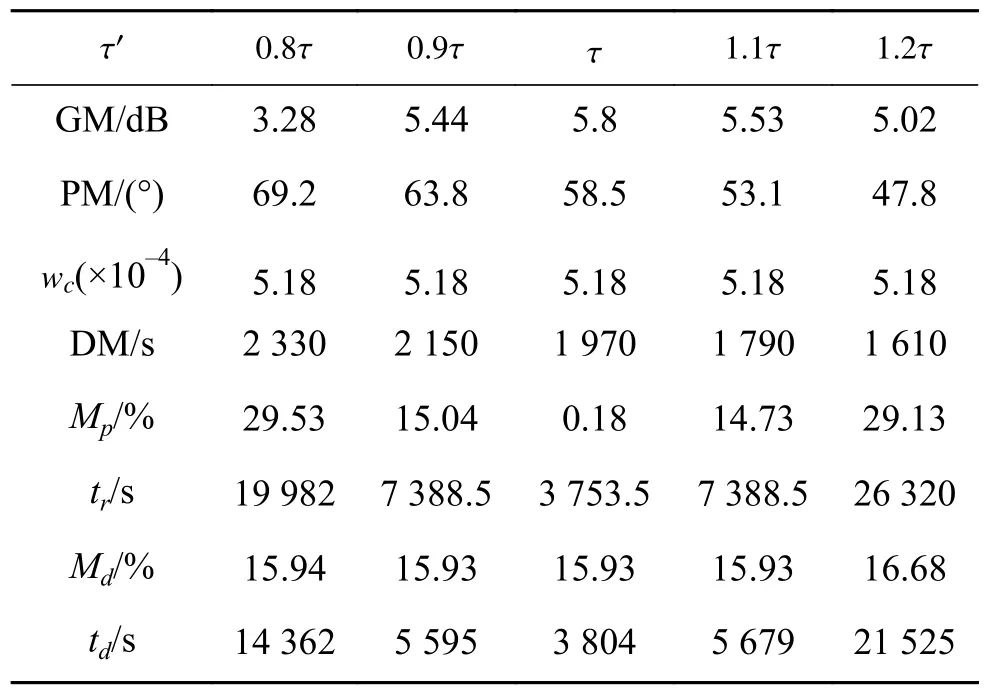
表 4 变化的性能指标Table 4 Performance index when changes
GM/dB 3.28 5.44 5.8 5.53 5.02 PM/(°) 69.2 63.8 58.5 53.1 47.8 (×10–4) 5.18 5.18 5.18 5.18 5.18 DM/s 2 330 2 150 1 970 1 790 1 610 Mp/% 29.53 15.04 0.18 14.73 29.13 tr/s 19 982 7 388.5 3 753.5 7 388.5 26 320 Md/% 15.94 15.93 15.93 15.93 16.68 td/s 14 362 5 595 3 804 5 679 21 525
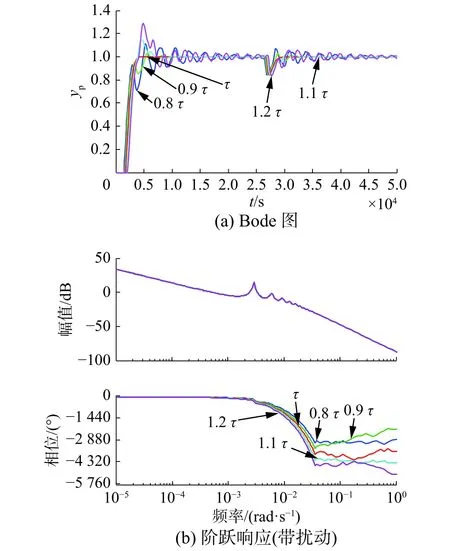
图 10 变化的阶跃响应(带扰动)和Bode图Fig. 10 Step response with disturbance and Bode diagram for
下面进行验证,对如上同一被控对象,选择同一控制参数设计3个Smith预估器、和:

进行时域和频域分析,如图11所示。

表 5 不同Smith预估器的性能指标Table 5 Performance index for different Smith predictors
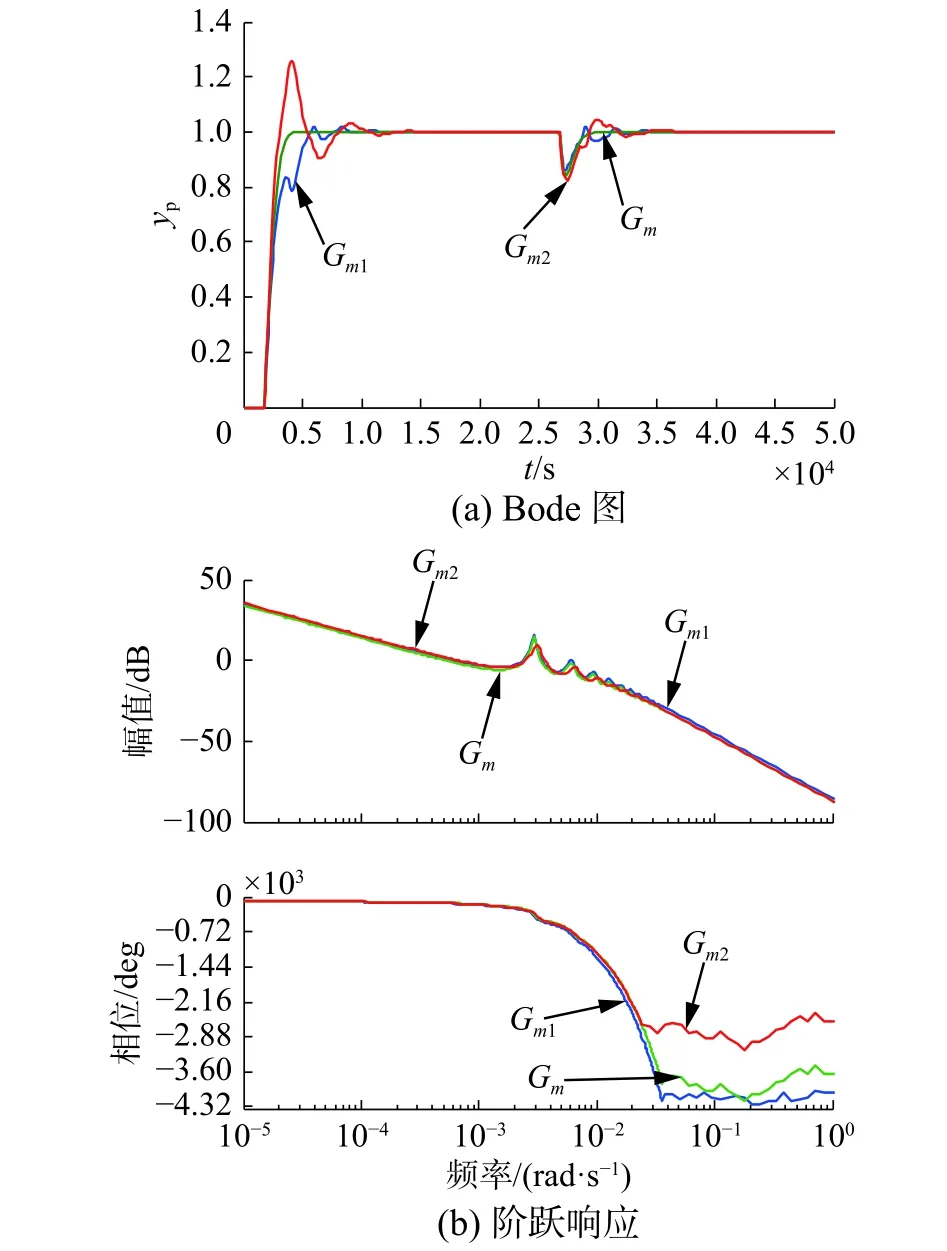
图 11 不同预估器的阶跃响应和Bode图Fig. 11 Step response and Bode diagram for different predictors
4.2 控制参数
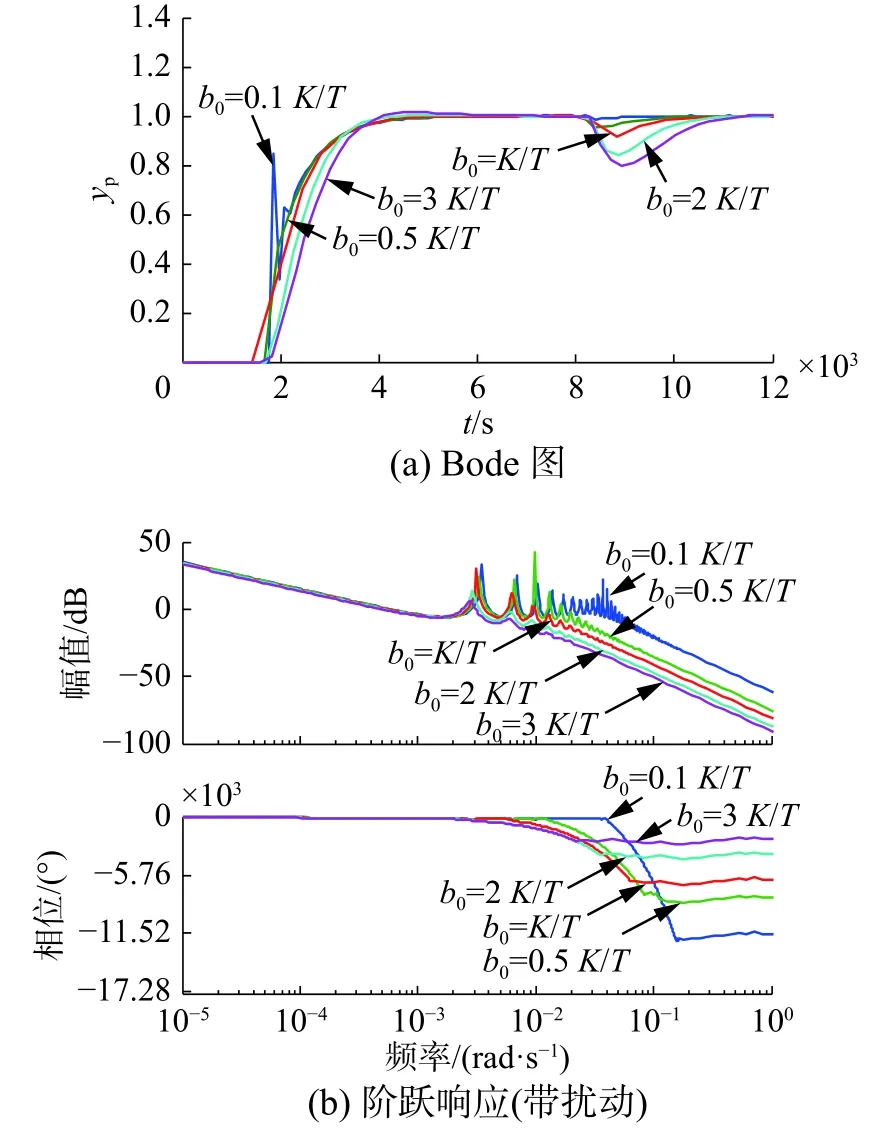
图 12 变化的阶跃响应(带扰动)和Bode图Fig. 12 Step response with disturbance and Bode diagram for
表 6 变化的性能指标Table 6 Performance index when changes
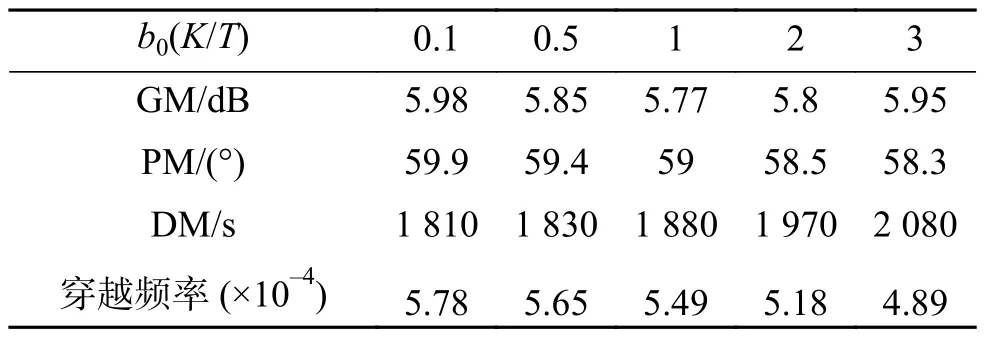
表 6 变化的性能指标Table 6 Performance index when changes
b0(K/T) 0.1 0.5 1 2 3 GM/dB 5.98 5.85 5.77 5.8 5.95 PM/(°) 59.9 59.4 59 58.5 58.3 DM/s 1 810 1 830 1 880 1 970 2 080穿越频率 (×10–4) 5.78 5.65 5.49 5.18 4.89
1) 系统响应变慢,振荡消失,出现了超调;
2) 当扰动出现时,扰动偏离量和扰动恢复时间增加,抗扰性能变弱;
3) 增益裕度先减小后增加,相角裕度减小,时滞裕度增加,穿越频率减小。
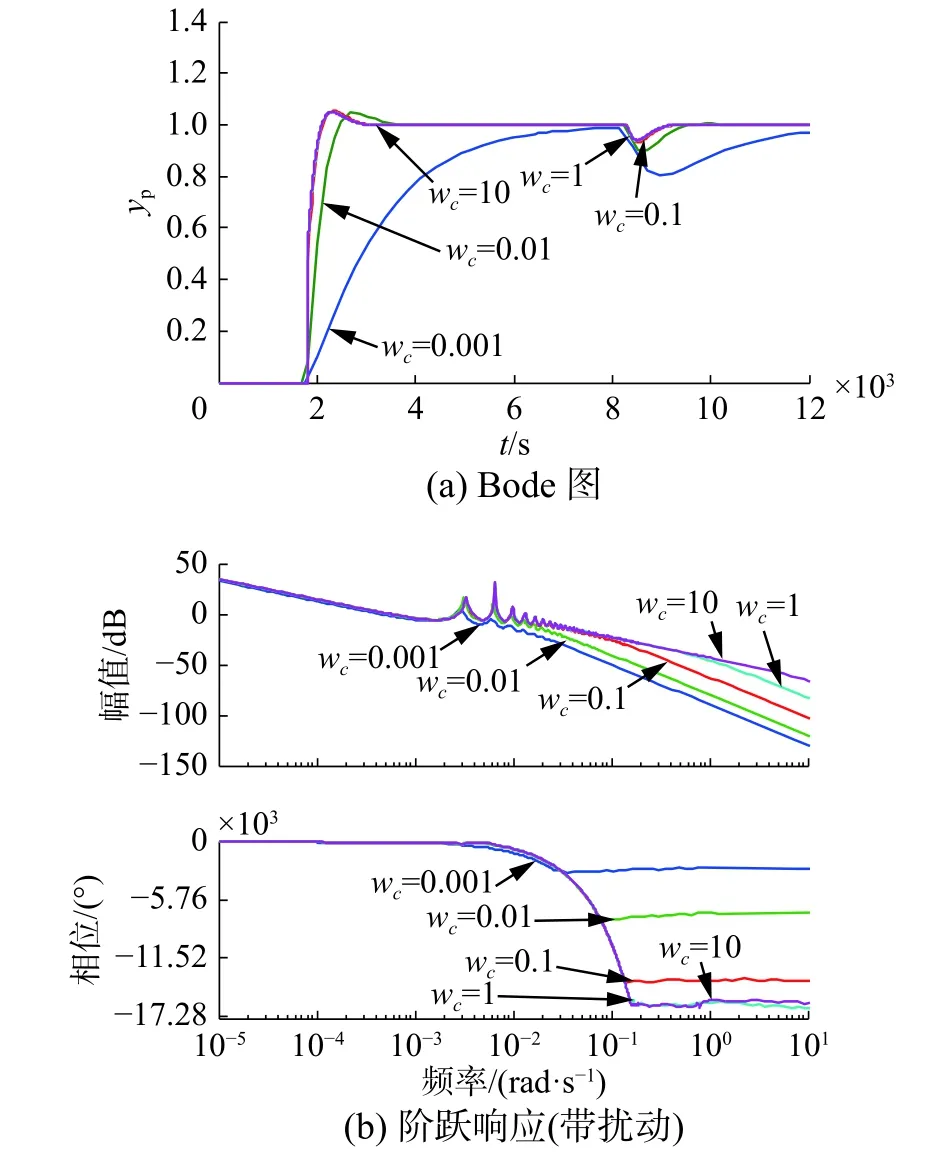
图 13 变化的阶跃响应(带扰动)和Bode图Fig. 13 Step response with disturbance and Bode diagram for
表 7 变化的性能指标Table 7 Performance index when changes
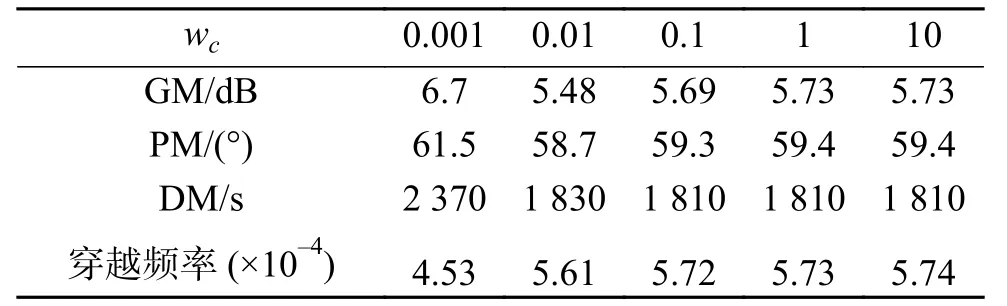
表 7 变化的性能指标Table 7 Performance index when changes
wc 0.001 0.01 0.1 1 10 GM/dB 6.7 5.48 5.69 5.73 5.73 PM/(°) 61.5 58.7 59.3 59.4 59.4 DM/s 2 370 1 830 1 810 1 810 1 810穿越频率 (×10–4) 4.53 5.61 5.72 5.73 5.74
可以看出:随着控制器带宽增加,1) 系统响应变快,出现了超调;2) 抗扰性能增强,扰动偏离量和扰动恢复时间减小;3) 增益裕度和相角裕度先减小后增加,时滞裕度减小,穿越频率增加。
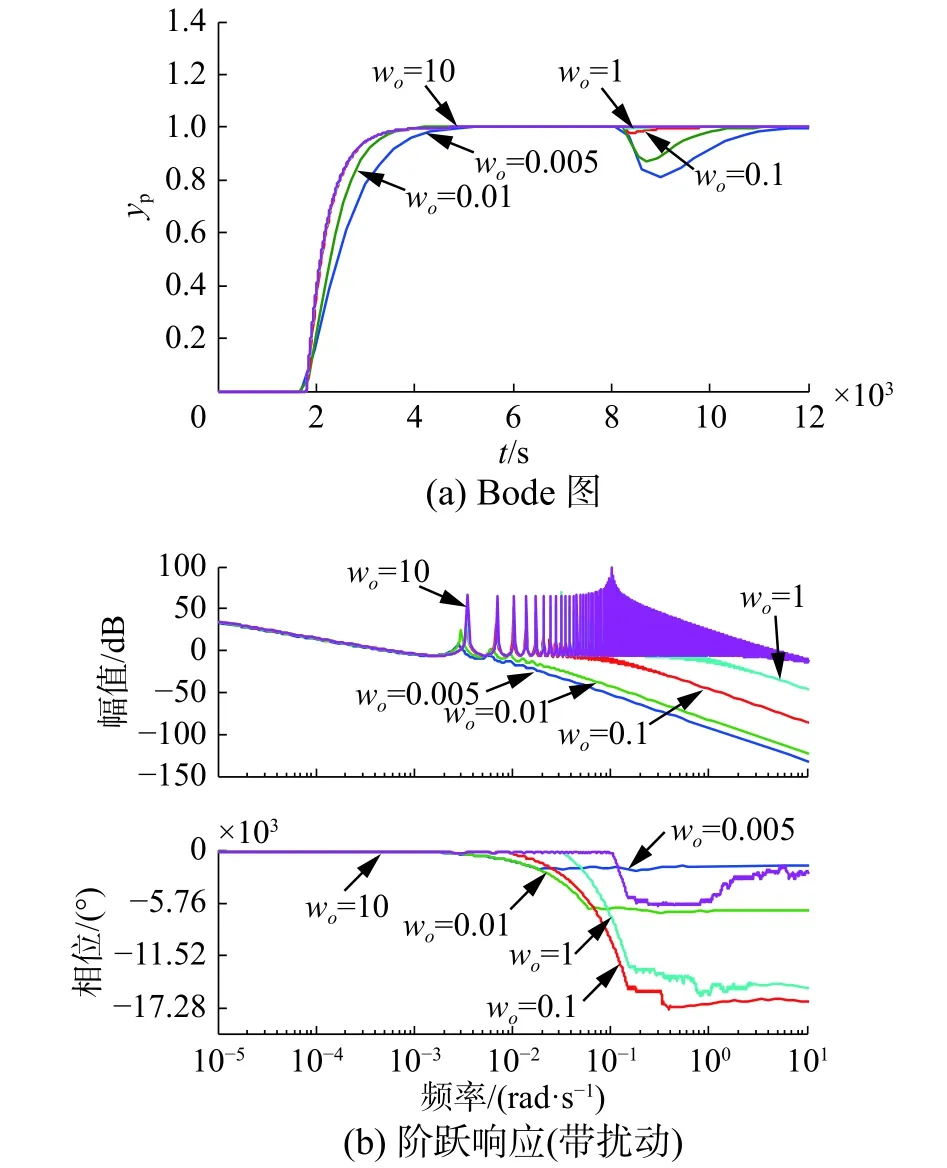
图 14 变化的阶跃响应(带扰动)和Bode图Fig. 14 Step response with disturbance and Bode diagram for
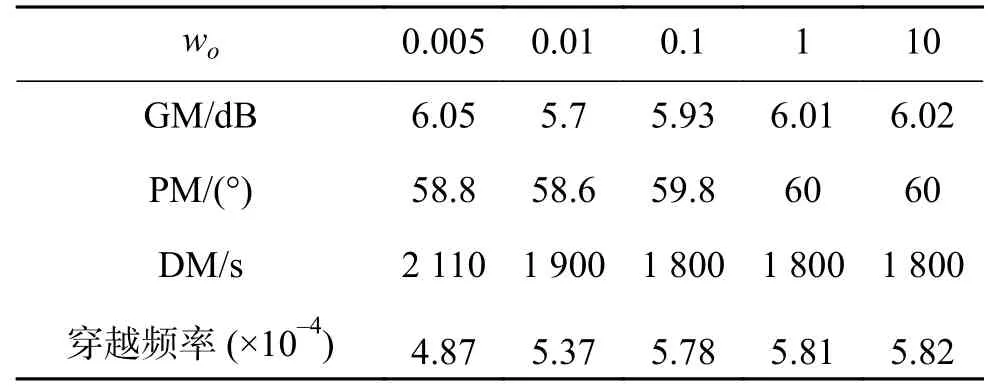
表 8 wo变化的性能指标Table 8 Performance index when wo changes
可以看出:随着观测器带宽增加
1) 系统响应变快,调节时间变短;
2) 抗扰性能增强,扰动偏离量和扰动恢复时间减小;
3) 增益裕度和相角裕度先减小后增加,时滞裕度减小,穿越频率增加。
综上,可以得到如下控制参数调节规则:
5 结束语
本文针对大时滞系统,研究了基于Smith预估器的线性自抗扰控制的稳定条件,通过MATLAB仿真进行验证,并分析了系统参数和控制参数对系统的影响,得出以下结论:
1) 当被控对象准确已知,Smith预估器参数与被控对象相同时,系统是稳定的。当被控对象大约已知时,根据稳定的近似充分条件选择Smith预估器参数进行设计,根据性能需要适当调节参数,系统更易稳定。
3) 本文分析建立在被控对象大约已知的基础上,限制了实际应用,而且Smith预估器参数与被控对象不同时的近似充分条件并不能保证系统一定稳定,有一定局限性。所以对模型未知情况下的系统控制和稳定性证明需要进一步探索。
猜你喜欢
化工自动化及仪表(2021年6期)2021-11-26
石油沥青(2021年1期)2021-04-13
空间科学学报(2020年4期)2020-04-22
天津教育·下(2018年9期)2018-07-13
自动化仪表(2017年8期)2017-08-30
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
考试周刊(2017年7期)2017-02-06
城市建设理论研究(2014年11期)2014-04-21
