地铁车辆牵引电机矢量控制的研究与应用
2018-09-14 11:31:54湖南磁浮交通发展股份有限公司
电子世界 2018年17期
湖南磁浮交通发展股份有限公司 石 硕
随着城市规模不断扩大,人们出行与交通拥堵的矛盾日益凸显。地铁由于运量大、准时、速度快、节省地面空间、节约能源等特点,成为缓解城市交通压力的一种有效手段。同时,公众对地铁运营速度、载客能力提出了更高的要求,车辆牵引系统设备也逐步升级以提高车辆平均旅行速度、最大运行速度。本文提出采用矢量控制对交流异步牵引电机转矩控制进行调速,优化车辆牵引特性;分析了交流异步电机的空间矢量等效变换、dq坐标系变换、MT旋转坐标轴同步,推导矢量控制数学模型;结合地铁车辆牵引系统仿真牵引电机矢量控制的性能。
1 矢量控制数学模型
1971年,德国学者Blaschke提出了交流电动机矢量控制理论,它的出现对电机技术的研究具有里程碑的意义[1]。矢量控制是电机磁场定向控制实现瞬时转矩的控制方法,通过适当的坐标变换将定子电流矢量分解为励磁电流分量和转矩电流分量,把交流量控制变化为直流量控制,等同于直流电机。
1.1 空间法平面
将某些在空间按正弦分步的物理量用空间矢量表示。以三相感应电机感应电动机与转轴垂直的空间断面作为空间复平面表示电机内部空间矢量。
在电动机复平面内,取空间静止复坐标(Re-Im),以实轴为空间坐标参考轴,空间中任一矢量R可表示为R=∣R∣ejθ,∣R∣为矢量的模,θ为矢量轴线与参考轴的空间电角度,称为空间相位[2]。
三项绕柱轴线ABC构成空间三相轴系,ABC轴系在空间复平面的位置,A相绕组轴线与Re空间电角度来确定,取A轴与Re轴重合,B轴的空间电角度为α= ej120º,B轴的空间电角度为α2= ej240º。
定子三相绕组通电后分别产生沿着各自绕组轴线脉动的空间磁动势fA、fB、fC,各自以ABC轴沿圆周正弦分布的空间矢量,其幅值为FA(t)、FB(t)、FC(t)是变化的,取决于相电流的瞬时值。三相基波合成的磁动势为fs,即:

式中,fs为空间矢量;其幅值为Fs。
定子电流可以是任意波形和任意时刻的瞬时值,其流入绕组产生的磁动势在空间按正弦分布,fS是三相电流通过绕组共同作用的结果。当电流变化时,fS的幅值和相位都在变化。同时,其旋转轨迹为圆形,半径为每相基波磁动势最大幅值3/2倍,矢量旋转的电角度ωS就是电流角频率,旋转方向是从A轴到B轴再到C轴。当时间参考轴与复平面的实轴重合时,fS的空间相位与A轴电流的时间相位相同。A相电流最大时,fS的与A轴重合,B相和C相亦然。
在复平面上不但可以用空间矢量表示定子绕组的电压、电流、磁动势以及其合成矢量,也可以表示转子绕组的相应参数。
1.2 ABC轴系到dq轴系的坐标变换
将空间复平面的实轴Re定为d轴,虚轴Im为q轴,构成dq轴系,空间矢量f采用dq轴系表示为f d、f q。用DQ和dq绕组分别取代原来的定子、转子三相绕组[3]。
1.3 同步旋转MT轴系坐标变换
MT轴系是以同步角速度在空间旋转的正交坐标系。在图1中,各空间矢量在同步坐标系内正交变换。is是ABC轴系中电机实际产生的空间矢量,这是单轴复矢量。在正弦稳态下,is在MT轴系中为直流量,变换后的iM和iT也为直流量。MT轴上的磁动势矢量fM和fT不再是脉动的,而是固定不变的,其幅值和方向取决于相电流的有效值、A相电流相位初始角和MT轴系初始位置角。磁动势矢量相对MT轴是静止的,但依靠MT轴的旋转,成为同步旋转的原型磁动势。通过控制iM和iT即可控制is。在动态情况下,仍可通过iM和iT控制is的幅值和相位。
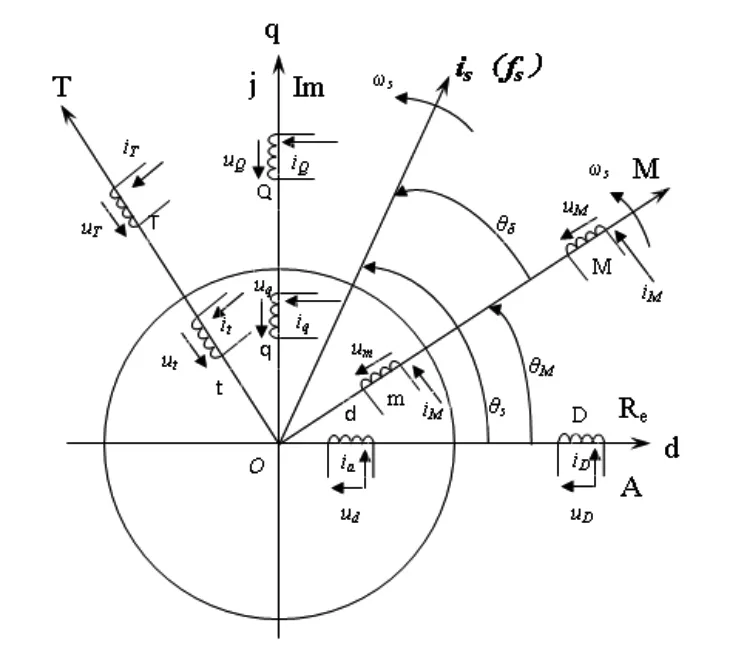
图1 静止dq轴系到同步旋转MT轴系的矢量变换
矢量变换控制的数学模型为:

式中uM、uT为定子电压归算到MT轴的分量;um、ut为转子电压归算到MT轴的分量;iM、iT为定子电流归算到MT轴的分量;im、it为转子电流归算到MT轴的的分量。
矢量变换对电压、电流的波形没有限制,不仅适用稳态分析与控制,也适用于动态分析与控制。
2 牵引电机矢量控制特性仿真计算
车辆牵引电机工作性仿真计算是对列车牵引和运行特性的理论验证,为牵引系统设计、电机及其控制算法提供理论依据,证明牵引性能满足实际需要。同时,通过牵引特性仿真计算可以优化牵引控制,也为供电、信号、轨道等系统设计提供的车辆边界条件。牵引电机参数如表1。
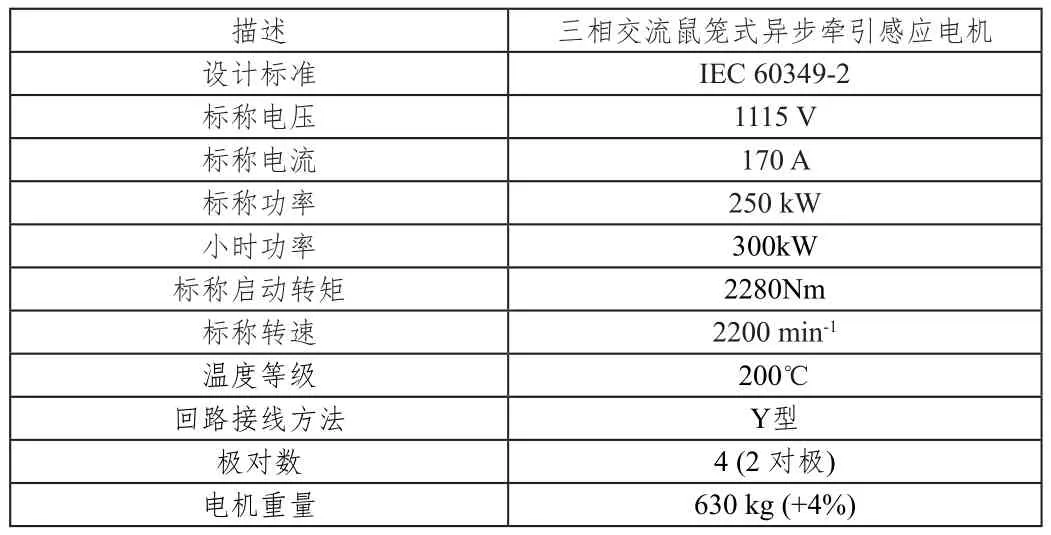
表1 电机参数

图2 仿真初始条件设置
对基于矢量控制的列车牵引系统的特性进行计算,仿真初始条件为图2所示。
牵引电机仿真结果,电机最大滑差率s=13%,滑差率随电机转速升高逐步降低;恒转矩输出为2200Nm,恒转矩转速区域为0-1400rpm,电流基波有效值为305A;最小转矩为550Nm转速为3750rpm,电流基波有效值为140A;最大工作频率为128Hz,转速为3750rpm;电机最大电压基波有效值为1080V;电机最高效率为94%。
3 结论
本文在分析电机矢量控制基本原理和数学模型的基础上,对地铁车辆牵引电机矢量控制进行仿真,通过分析得到以下结论:
(1)异步电机矢量控制方法解耦了电机励磁和转矩,可提高动态性能。
(2)矢量控制实现电机恒转矩、恒功率、弱磁三阶段调速。增大电机恒转矩、恒功率运行区域,在高转速情况下保证电机效率,弱磁调速阶段优化转矩输出。
(3)电机参数以及在运行中的变化情况,将直接影响到磁场定向的准确性,同时电源低次谐波电流将产生转矩脉动,并造成转速脉动,这些问题将决定矢量控制的性能。矢量控制必须基于精准的电机及电源模型的前提下完成。
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
北京交通大学学报(2022年2期)2022-06-24 02:27:50
防爆电机(2022年3期)2022-06-17 01:41:24
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
陕西理工大学学报(自然科学版)(2020年4期)2020-08-20 00:57:16
船舶标准化工程师(2019年4期)2019-07-24 07:21:06
电气技术(2016年3期)2016-10-14 06:06:56
舰船科学技术(2016年1期)2016-02-27 15:39:19
船海工程(2015年4期)2016-01-05 15:53:26