
大靶面光幕靶背景光源状态监测与故障定位
2018-09-11 11:34倪晋平甘学文田亚男
探测与控制学报 2018年4期
田 会,袁 云,倪晋平,甘学文,田亚男
(1.西安工业大学光电工程学院,陕西 西安 710021;2.重庆建设工业(集团)有限责任公司技术中心,重庆 400054)
0 引言
弹丸飞行速度是衡量身管武器作用效能的基础指标,在武器研制、交验和定性过程中都需要准确测试。基于光电探测原理的光幕探测器可实时测量弹丸在预定位置的飞行速度,具有响应速度快、灵敏度高、非接触测试和成本低等优势,现已成为武器生产、企业研制的主力测速设备[1-3]。针对更大探测靶面的测试需求,研究者提出采用2条长度为10 m的线阵列光源构成L形背景光源,配合镜头式光幕探测器件,可在室内形成10 m×10 m的探测幕面[4]。L形背景光源由数量约为4 800个直径为5 mm子弹头LED形成,当背景光源中的某个LED发生故障时,会直接影响测试系统的稳定性,严重时造成测试系统无法正常工作。传统的光源状态监测方法主要以人员进入靶道直接观察为主,在强光照射下当视觉疲劳时易出现错检、漏检现象,当LED发生高频闪烁或针对近红外光源人眼无法进行有效判定[5-7]。本文针对上述不足,提出了大靶面光幕靶背景光源状态监测与故障定位方法。
1 光源状态监测装置搭建
L形背景光源在结构上可认为是由多段弧形光源按照一定的位置和角度所构成,镜头式光幕探测器安装在光源主光线汇聚点位置处,线阵列相机安装在光幕探测器的上方,相机成像视场尽量与光幕探测器视场重合,如图1所示。L形背景光源中的每段LED线阵列光源模块上均固定有12个直径为5 mm的LED,相邻LED的中心距离为6 mm,光源模块间距为2 mm。选用分辨率为7 K,行频为3.9 kHz的线阵相机配合焦距为14 mm定焦镜头,搭建图像采集系统其视场可有效监测10 m×10 m靶面内LED的状态。
图1 光源状态监测系统整体结构示意图Fig.1 The structure diagram of light source condition monitoring system
限于实验室尚不具备10 m×10 m的L形光源,本文采用与L形背景光源构造方式一致的半径为2 m的弧形光源作为被测目标,以验证研究方法的有效性与可行性,该弧形光源结构长度为1.2 m,包括17个光源模块。
2 光源故障类型分析
光源在实际使用过程中出现的故障主要包括3种类型:某个光源发生短路或断路时,导致对应模块上的部分LED熄灭,当弹丸从该探测区域内穿过时,探测器无法有效输出弹丸过幕信号[8];光源长时间使用后光源光能量衰减,导致光幕探测灵敏度下降[9];个别LED发生闪烁,引起探测器持续输出干扰信号,无法进行正常测试。如图2所示为相机采集弧形光源发生3种故障时所对应的灰度图像。依据背景光源电路设计特点,当LED光强发生衰减和熄灭时,以选取适当的阈值对图像进行二值化处理,即可对该类型的故障进行直观判断[10-12]。当LED发生闪烁时,特别是人眼无法判别的高频闪烁,传统图像处理算法已无法准确识别LED闪烁的频率高低和故障位置。本文针对LED发生闪烁时,研究了快速准确判定闪烁频率和故障定位的方法。

图2 光源发生不同故障的灰度示意图Fig.2 Gray diagram of different failures of light source
3 图像预处理与故障定位
3.1 目标图像预处理
图3为采用光源状态监测系统采集背景光源工作状态的图像,其中图3(a)为光源工作状态正常时的标准图像,图3(b)为背景光源不同位置处的LED发生了1 kHz和5 kHz频率闪烁时的目标图像。由于采集到的图像具有一定噪声干扰,先需进行降噪处理。因光源状体图像中条纹信息居多,降噪算法选取不当将直接影响故障定位精度。通过对均值滤波、高斯滤波、中值滤波、维纳滤波进行客观评价后,采用对图像水平和垂直方向纹理信息保持较好的均值滤波算法进行降噪处理,处理后的图像如图4所示。
光源模块各特征结构在灰度图像中所占的像素数直接决定故障定位精度。通过采集的光源标准图像,结合光源结构特征确定每个特征结构所占的像素数:光源模块所占像素数为410;相邻光源模块之间缝隙所占像素数为13;单个LED所占像素数为28±3(因光源存在一定的发散角),相邻LED之间缝隙所占像素数为6。
图3 相机采集光源工作过程中图像Fig.3 Use the camera to capture light source working images

图4 均值滤波后的目标图像
Fig.4 The mean filtered target image
3.2 故障定位
对经预处理后的目标图像4,按图5所示的故障检测流程进行故障监测与定位。依据光源模块不同结构所占的像素数,建立缺陷位置对应的像素点与对应背景故障光源LED之间的对应关系,通过反解可准确判定背景光源发生故障的位置。
以目标图像第78行像素灰度值为参考值(行数的选取在扫描范围之内),取目标图像第76—85行像素灰度值,与第78行像素灰度值逐次进行差值运算,结果如图6所示。在同一位置出现不同程度的灰度跳跃现象。设跳跃灰度值大于20时(结合镜头式光幕探测器件的响应特性确定阈值),该位置的LED发生了闪烁。即图4中的缺陷定位于第2 557
-2 585像素点处;同样可定位另一处的缺陷位于第4 923-4 895像素点处。
图5 缺陷检测算法流程图Fig.5 The flow chart of defect detection algorithm
图6 故障图像固定行与不同行像素值灰度差值结果示意图Fig.6 The result of pixel gray value difference between the fixed line and other lines of the fault image
按照上述方式确定缺陷对应的像素点后,通过式(1)—式(4)对故障进行定位:
eq1=410x+13×(x-1)-Piont(end)
(1)
eq2=ceil(eq1)
(2)
eq3=410×(eq2-1)+13×(eq2-1)
(3)
eq4=6×(m-1)+28m+eq3-Piont(end)
(4)
式(1)—式(4)中,x表示故障光源模块位置,m表示该模块上对应的故障LED位置,ceil(eq1)表示如果eq1有小数部分则进一位,Piont(end)表示单一缺陷所对应的最后一个像素点。
由上式反解可知第一处故障位于第6个光源模块上第7个LED处;第二处故障位于第12个光源模块上第4个LED处。
3.3 闪烁频率判定
依据上述故障定位结果,取目标图像第一处缺陷中心位置即第2 570像素点对应的列灰度值,其灰度曲线如图7(a)所示;第二处缺陷中心位置即第4 936像素点对应的列灰度值,其灰度曲线如图7(b)所示;再取第二处缺陷位置的第4 933像素点对应的列灰度值,其灰度曲线如图7(c)所示;分析两处缺陷对应的列灰度曲线分布可LED发生闪烁时的灰度值分布特点:闪烁频率越高故障中心处灰度幅值越高且接近255,故障边缘灰度值呈现锯齿状分布;闪烁频率较低时,故障中心处对应的灰度值呈梳状分布且值幅值差异较大。因此可直观判定目标图像第二处的闪烁频率比第一处的闪速频率的高。
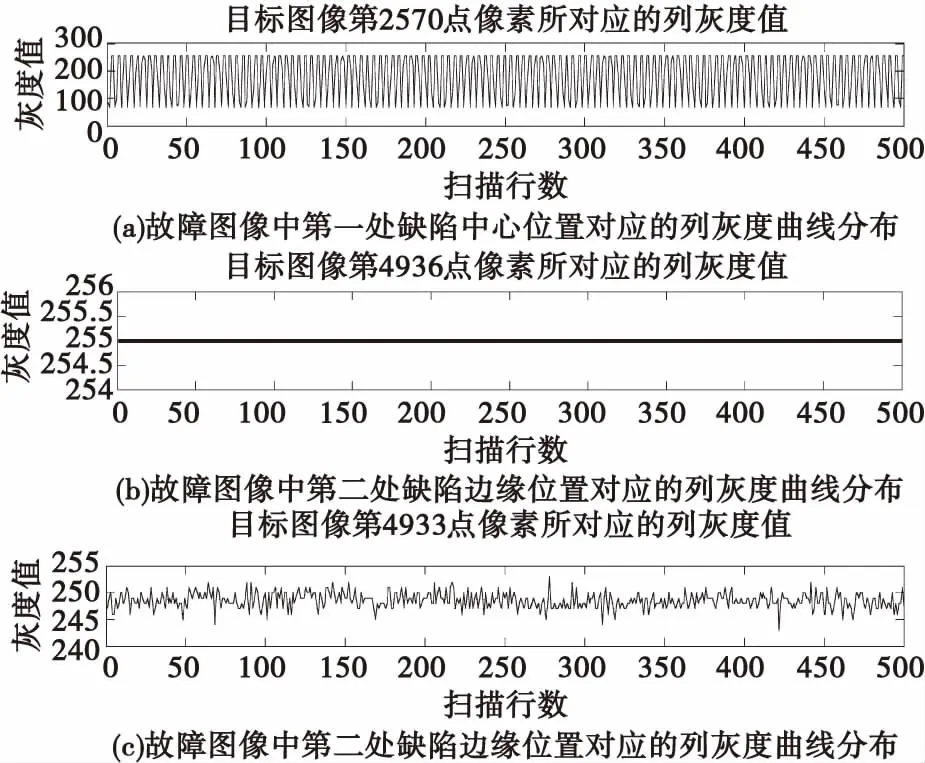
图7 目标图像故障位置对应列的灰度分布曲线图Fig.7 The column grayscale curve of fault in the target image
4 结论
本文提出了大靶面光幕靶背景光源状态监测与故障定位方法。该方法使用差影法获取目标图像中缺陷位置对应的行、列像素特征值;结合不同光源模块结构所占像素数,建立了缺陷像素位置与光源参数之间的转换模型,实现了光源故障准确定位。试验表明该方法有效可行,LED故障定位精度优于5 mm,为大靶面光幕测速系统的可靠工作提供技术保障。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
合肥工业大学学报(自然科学版)(2021年11期)2021-12-10
家庭影院技术(2021年9期)2021-11-05
上海工艺美术(2021年4期)2021-04-24
集装箱化(2021年1期)2021-04-12
家庭影院技术(2021年2期)2021-03-29
天津医科大学学报(2021年1期)2021-01-26
现代电子技术(2021年1期)2021-01-17
中国信息技术教育(2020年2期)2020-02-02
现代电子技术(2018年18期)2018-09-12
