
揭开多旋翼无人机的神秘面纱(下)
2018-09-08 08:30姜连涛
第二课堂(校外活动版) 2018年8期
姜连涛
(接上期)
无人机飞控系统的核心是飞行控制器,简称飞控,也叫自驾仪,即自动驾驶仪,它的存在是无人机与航模不同的根本原因。飞控系统是无人机的大脑,无人机所能实现各种功能都有赖于它的性能(如图1)。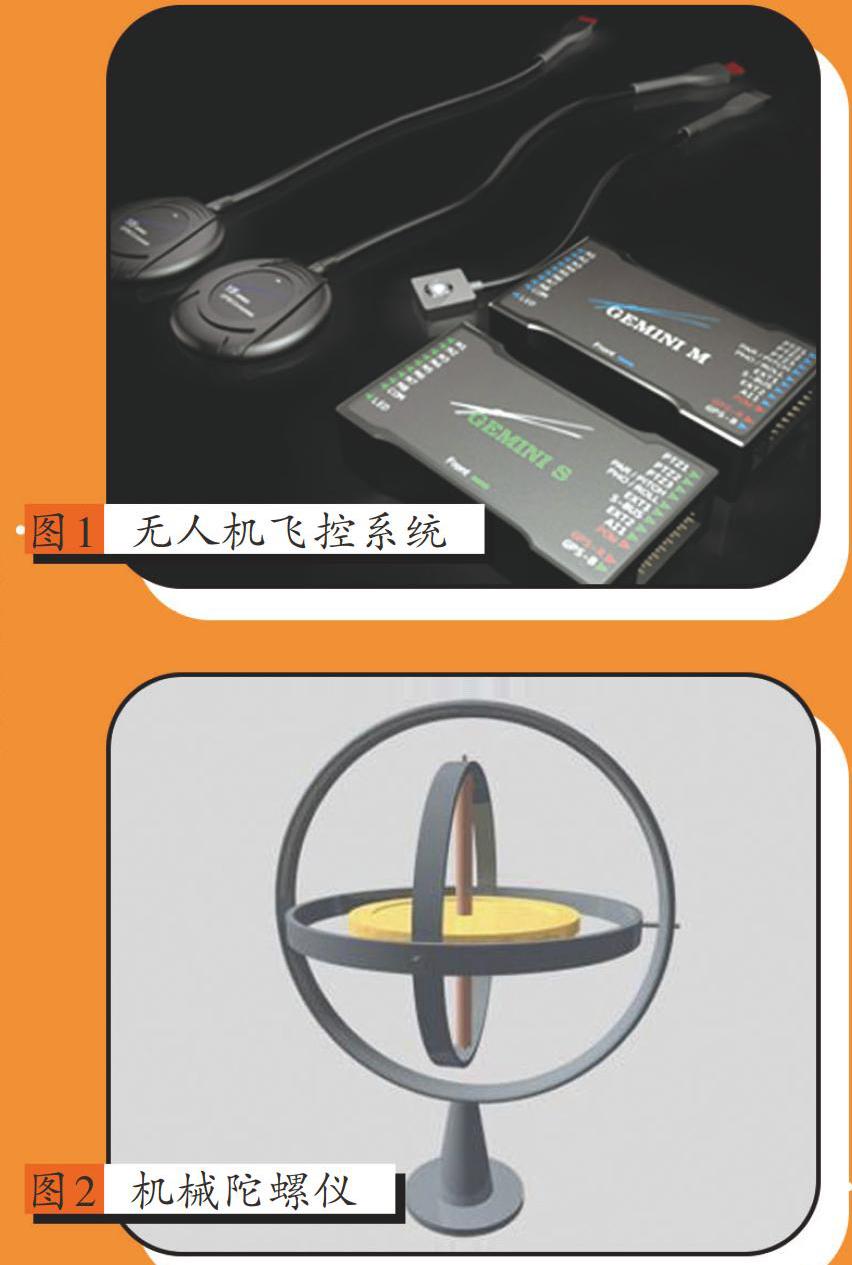
无人机飞控系统有两个最重要的功能。第一个功能是稳定飞机的姿态,就像人一样,人类耳朵里面有个结构叫半规管,如果你在原地快速转上好幾圈,是不是会觉得天旋地转?那就是因为你人停下了,半规管还没有恢复原状。多旋翼无人机作为空中机器人,要稳定姿态,也需要这样类似的结构,那就是陀螺仪,配合着一些其他传感器,比如通过测量气压来保持飞机高度的气压计,无人机就可以知道自身当前的状态,并且做出相应调整来保持自身的稳定。图2所示为机械陀螺仪,这么大的陀螺仪显然没有办法放在无人机小巧的机身内,目前无人机所用陀螺仪已经是电子的了,如图3所示的就是电子三轴陀螺仪。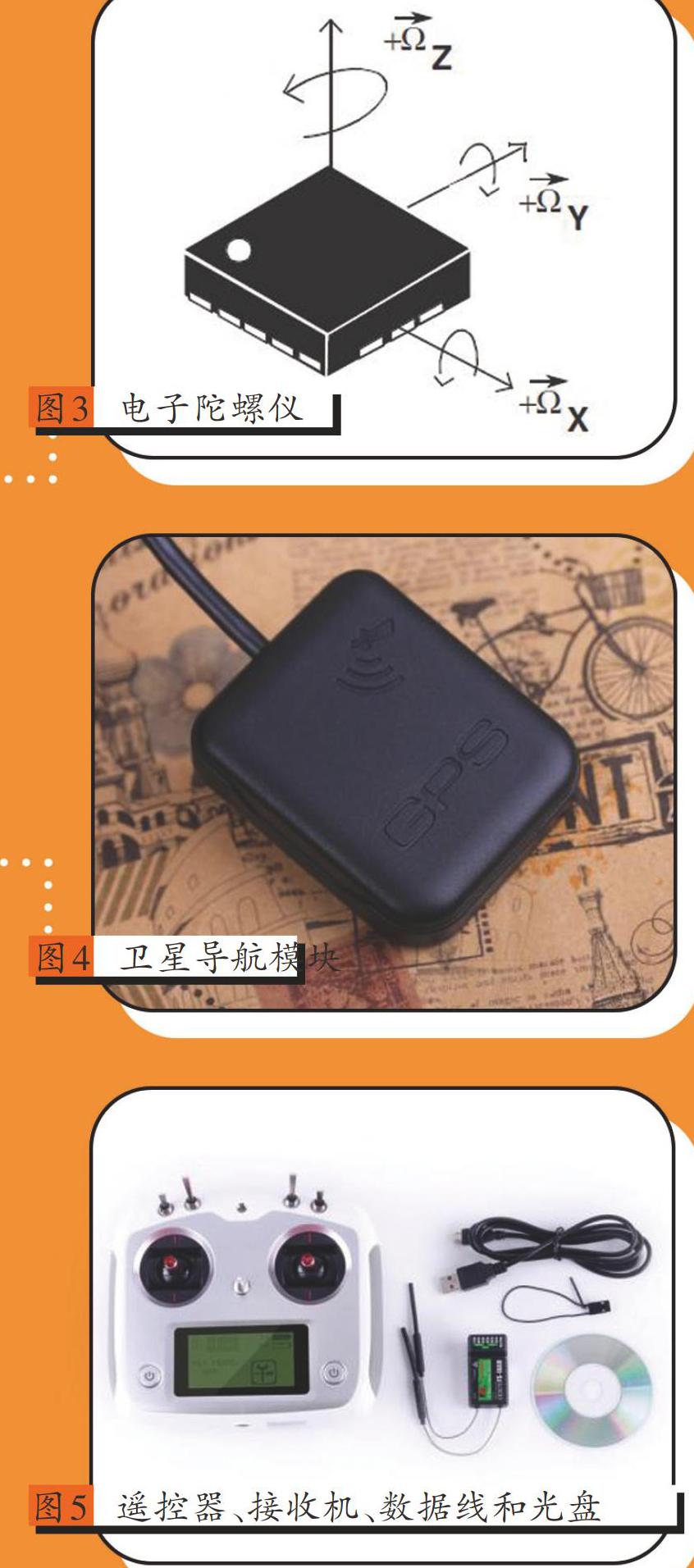
无人机飞控系统的第二个功能就是自动驾驶功能,也就是在设定好起点和终点之后,无人机可以在没有人参与的情况下,自动从起点飞到终点。实现这个功能最重要的部件是什么呢?就是卫星导航模块。像我们手机的导航软件一样,无人机的卫星导航模块可以让无人机知道自己当前在哪里,要去哪里。飞控系统知晓这些之后,就会控制相应的电机,使无人机向目的地飞去。
我们来总结一下,陀螺仪就像人的半规管,而飞控就像是大脑,电机、电调就是无人机的手脚。这三个部分相互配合,共同造就了无人机的机器人属性。
链路系统就好比放飞风筝时,你和风筝之间的那根线,风筝要飞向哪里,都是由你拉扯线来决定的。无人机要飞向哪里,也需要这样的一根“线”,只不过这根线是看不见的。那么,无人机是使用什么设备来实现这个“线”的功能呢?就是通过遥控器和接收机。遥控器即发射机,我们叫它“控”,用来发射信号;接收机安装在无人机上,用来接收信号,遥控器和接收机需要配对使用,这条链路主要用于在视距内控制飞机,如图5所示。遥控器发射哪些控制信号是由飞手来决定的,所以飞手操作技术的好坏,会直接影响无人机的飞行状态。这就要求我们在飞行之前耐心地练习自己的无人机飞行控制技术,做到心中有数,手上有准,保证飞行安全和飞行质量。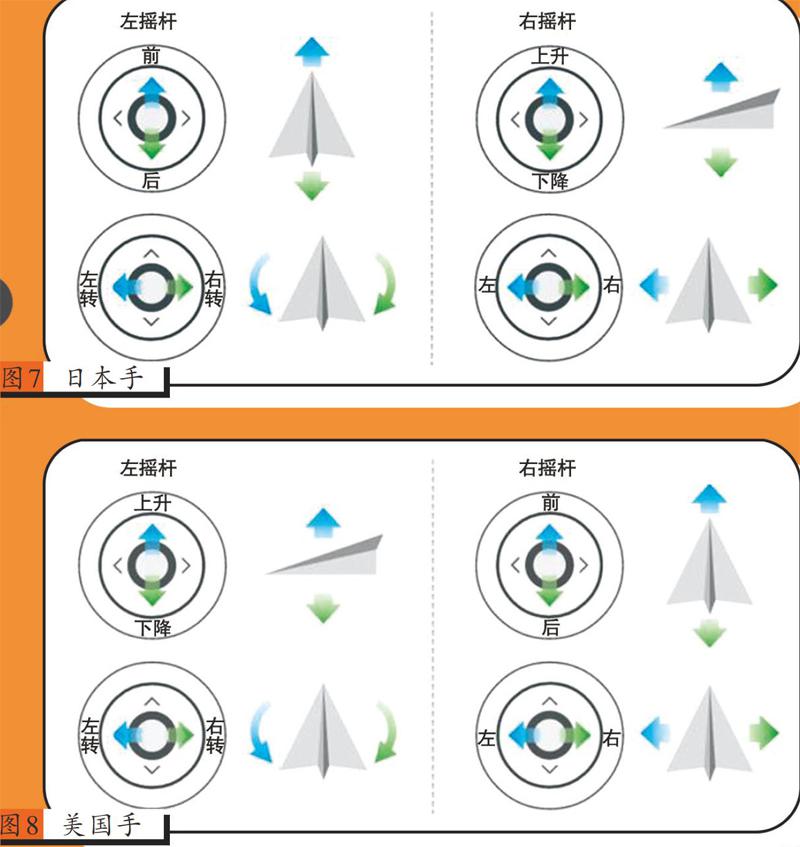
遥控器现在已广泛地应用于各种类型的民用无人机上。无人机在起飞和降落过程中主要通过遥控器手动控制来完成,并且在视距范围内自动驾驶时,如果无人机出现异常状况,也需要迅速切换到手控状态。所以,遥控器是十分重要的设备,我们在学习无人机飞行时,使用遥控器控制无人机是最基础的技能。接下来,我们详细讲解一下无人机遥控器。
无人机遥控器(如图6)外部一般会有一根天线,遥控指令都是通过遥控器上的摇杆、开关和旋钮来控制产生,通过天线发射出去的。遥控器最重要的标志是通道数量,有几个通道,就表示遥控器可以控制飞行器几个动作,多旋翼无人机的基本动作有升降运动(无人机上升下降),俯仰/前后运动(无人机前后飞行),横滚/侧向运动(无人机左右飞行),偏航运动(无人机左转右转),所以无人机遥控器最低要求有四个通道,这四个通道实际上是遥控器上的两个摇杆,每个摇杆可以前后左右移动,正好对应着两个通道,两个摇杆就是四个通道。除了这些之外,实际使用中还需要预留出一些额外通道来控制其他的部件或状态,比如飞行模式、一键返航、收放起落架等。
遥控器根据四个基本通道在摇杆上的不同分布,分成了四种操作手法,目前最常用的是日本手(Mode1)和美国手(Mode2),日本手有时候也会直接简称右手油门,美国手简称为左手油门,甚至直接说左手或右手。这两种操作手法有什么区别呢?日本式手法是由右手前后推拉控制无人机升降运动,右手左右控制无人机横滚/侧向运动;左手前后推拉来控制无人机俯仰/前后运动,左手左右控制无人机的偏航运动,如图7。而美国式手法则是右手前后控制无人机俯仰/前后运动,左右控制无人机横滚/侧向运动;左手前后控制无人机升降运动,左手左右控制无人机偏航运动,如图8。日本手和美国手主要的区别就是把右手前后的功能和左手前后的功能进行了对调,那么为什么会这样呢?
我们知道美国的航空业发展很早,很多人都是先飞有人机才飞航模的,所以美国人在飞航模的时候就把有人机的控制方法对应到了遥控器上。但是美国手对于新手来说有个小问题,副翼和升降舵是最频繁操作的两个舵面,但都在右手,右手忙活,左手却可能没事干。所以日本人对遥控器做了改良,将这两个最频繁操作的舵面分开,把美国手右手控制的升降舵和左手控制的油门对调,这就成了日本手。日本手把飞机前后和左右的控制放在了两个手来控制,看似把任务平均分配了,但是却不如美国手方便理解。所以对于新手而言,美国手的初学者明显要比日本手初学者进步得快。但在漫长的练习学习过程中,这一差距会慢慢缩小,不管使用的是哪一种操作手法,都可以达到很高的技术水平。
无人机可以自主飞行,甚至超视距飞行,而且在飞行过程中不需要人实时操控,这个功能又是通过什么实现的呢?这就涉及另外一条链路了,它叫作数传链路。这一链路有两个设备,一个是连接在地面控制站上的地面端,一个是安装在无人机上的机载端(如图9所示)。我们通过数传链路将飞行任务上传给飞控,飞控接收到之后就可以按照设计好的飞行任务自主飞行了。在飞行过程中,机载端还会将无人机的实时状态,比如高度、速度、位置、电量等信息回传给地面控制站,飞手只需要实时监控飞行状态,处理突发状况。这就大大地解放了我们的双手,降低了劳动强度。
目前,无人机最重要的用途是用来航拍,用做航拍的多旋翼无人机还有第三条链路,就是我们常说的图传。在无人机上有一个图传发射模块,地面有一个图传接收模块,图传发射模块是将摄像头拍到的图像传输给地面的接收模块,只要把地面的接收模块连接在显示器上,就可以看到飞机当前拍到的图像了(如图10所示)。这就使我们在飞行中可以实时地看到无人机在空中拍摄到的景象,有一种身临其境的感觉!
无人机之所以在近些年得到广泛应用,主要是因为无人机可以帮助人们工作,比如航拍、植保、航测、应急救灾等。无人机说到底就是一个平台载具,就像汽车一样,没有挂载任务设备的无人机是没办法工作的。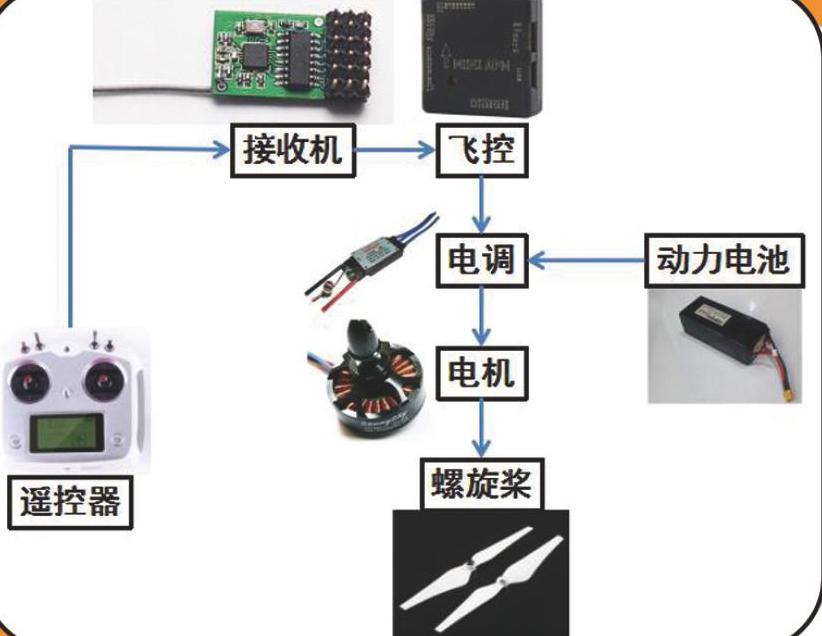
以最常见的航拍为例,是将无人机挂载上相机,这个相机可以有很多种,可以是小型的摄像头,也可以是微单,甚至可以是单反(如图11)。无人机目前虽然飞行十分稳定,但是在低空飞行时,会遇到非常多的乱流,如果将相机直接挂载到机身上,拍出的画面将会非常抖动,无法观看。于是,人们就设计出一个平台,专门用来抵消这些抖动,使相机保持稳定,这就是云台。
任务设备有许多种,可以这样说,你想让无人机做什么样的工作,就可以把相应的设备挂载到无人机上,当然你要考虑设备的重量是不是无人机所能承受的。
讲到这里,我们已经将多旋翼无人机系统的关键部件向大家介绍完了,那么这些部件之间的连接关系是怎样的呢?其实如果你善于总结,在上面几小节的学习过程中,应该能总结出这些部件之间是怎么连接的,可以试着自己画一下!
我们用一张图来总结一下无人机各部件之间的连接关系,这里我们只列出无人机最关键的遥控链路、飞控系统和动力系统之间的连接,对于数传链路和图传链路我们将在后面的内容中介绍。
如图12所示,我们以动力系统中的一路为例,从遥控指令开始,有顺序地了解部件间的连接关系,这样十分容易理解,不用死记硬背。当我们操作遥控器上的摇杆或者拨杆时,遥控器将会发出无线电信号,无人机上的接收机在收到信号之后会将信号指令传送给无人机的大脑——飞控。飞控中的微处理器会进一步处理信号,并且根据信号将指令发送给电调,电调控制电机加速或者减速,电机带动着螺旋桨,由于转速的变化,飞机的姿态以及飞行轨迹相应地就会产生变化。当这一切发生的时候,千万不能忘记还需要动力电池提供能量,动力电池的能量将直接输送给电调,电调将这些能量提供给电机,让电机有充分的力量旋转。讲到这里,不知道聪明的你是不是会有一个问题,那就是:飞控和接收机的能量是谁供应的呢?飞控和接收机的能量其实也可以使用动力电池提供,但是需要将电压降低,以防烧毁飞控和接收机;另一个供能的方法是使用电子调速器反向给飞控供电。
好了,讲到这里,你是不是对多旋翼无人机系统了解得更深入了呢?
对于一架轴距为450mm的四旋翼无人机来说,飞行时,螺旋桨的轉速可达到每分钟7000~8000转,旋转的螺旋桨锋利得就像刀。所以,大家在飞无人机时,一定要十分小心,不能让无人机与人距离太近,尽量给螺旋桨装上桨保护罩,保障安全最重要!
(编辑 孙世奇)
猜你喜欢
中阿科技论坛(中英阿文)(2020年2期)2020-05-27
航空模型(2017年8期)2018-02-08
电子技术与软件工程(2017年11期)2017-06-10
航空模型(2016年11期)2017-05-08
世界博览(2017年1期)2017-04-19
科技创新导报(2017年1期)2017-03-21
科技视界(2016年27期)2017-03-14
现代电子技术(2009年9期)2009-06-25
第二课堂(校外活动版)2018年8期
- 第二课堂(校外活动版)的其它文章
- 别让孩子太“听话”
- 植物系女生的压花世界
- 刺激的液氮秀
- 自己动手制作隐形墨水
- 城市公交车智能让座自控装置
- 神奇的自清洁材料