
一种平行接近的地磁梯度仿生导航方法
2018-09-07 10:29王琼周军
西北工业大学学报 2018年4期
王琼, 周军
(西北工业大学 精确制导与控制研究所, 陕西 西安 710072)
地磁场具有相当丰富的参数信息,其与地球近地空间的任一点都存在对应关系,是导航领域的一种天然坐标系。有关地磁导航的研究应用最为广泛的方式是地磁匹配导航,就是将飞行器导航路径上的实测地磁信息与机载地磁先验地磁图进行相关匹配,以获得飞行器的实测位置并解算导航信息[1-2]。这种方法可以克服惯导系统中误差随时间距离进行累积的缺陷,而且其具有自主性,抗干扰性能较强,能够全天时、全天候和全地域地执行自主导航任务[3],所以地磁导航已经成为目前较重要的一种导航方式。但是先验地磁图的绘制由于种种原因,其精确性和完整性难以得到保证。这就对地磁匹配导航这种对磁图精度依赖性较高的导航方法产生了极大的制约。近年来种种研究表明,地球上许多生物都可以根据地球磁场信息来进行定位和导航[4]。美国、德国、英国等多个国家对生物的地磁导航行为进行了实验验证和分析研究,研究表明:鸟类[5]、海龟[6]、鲑鱼[7]等生物都能够利用地磁场信息对自身的航向进行校正,从而实现自主导航[8-9];但是当其受到磁场干扰时,这些生物中的大部分都不能顺利地到达目的地[10]。这些生物的归巢、回溯等过程往往是长距离导航,显然它们的脑细胞中不大可能储存一副完整的地磁图,完成长距离导航所利用的仅仅为目的地的地磁信息。
西北工业大学的刘明雍等人[11]受生物利用地磁信息进行导航行为的启发,提出了一种基于时序进化策略的搜索方法,使得多参量收敛伴随并指导导航搜索的进行。导航过程中采用“优胜劣汰”的进化搜索模式,引导载体趋势性逼近目标点,因而导航过程也即航向角的寻优过程。但是其随机游走的导航搜索方式导致航向角波动较大,路径往往比较曲折,不能很好地应用于飞行器导航。
本文受其启发,为探求一种能适用于飞行器的仿生导航方法,在以终点地磁多参量为目标值的趋势仿生导航过程中,结合当前位置的地磁场梯度信息,提出一种不依赖任何先验地磁数据信息的仿生导航算法,利用实测数据平行接近目的地数据这一思想进行航向角预测,从而引导飞行器不断向目标点运动,最终完成导航。
1 地磁仿生导航策略
地磁场的参数信息会因地球上任一点的经、纬度和高度的不同而变化[12]。因此,地磁参量B可以描述为
B={B1,B2,…,Bn}
(1)
式中,Bi(i=1,2,…,n)为地磁参量元素,即地磁要素,是指表示地球磁场的方向和大小的物理量,由地磁场总强度F、水平强度H、磁偏角D、磁倾角I、磁场3分量X,Y,Z7个物理量组成。
仿生导航的目的是模仿生物快速安全地到达目的地,这种多目标收敛问题的目标函数Q可以描述为[13]
minQ(Bk,BT)=(q1,q2,…,qn),n=1,2,…,7
(2)
式中,Bk为飞行器当前位置k的地磁参量,BT为目标位置T的地磁参量;qi为第i个地磁参量Bi所对应的子目标函数,用来表示当前点与目标点之间的差异。仿生导航的任务就是使Bk中的n个参量在路径约束下最终收敛到目标值BT。当目标值Q达到最小,即当多个地磁参量的q收敛为0或者达到最小的时候,即认为飞行器到达目标点T。
2 平行接近地磁梯度仿生导航算法
2.1 平行接近导航策略
平行接近的概念是2个飞行器在交会过程中,实现转动速度在某一确定的坐标系为零,也就是2个飞行器之间的视线在接近过程中保持平行,如图1所示。在此情况下,追踪器就可以利用自身与目标器轨道速度差沿着视线方向接近目标[14]。平行接近法实现起来比较方便,而且弹道比较平直、导弹的过载比较小。
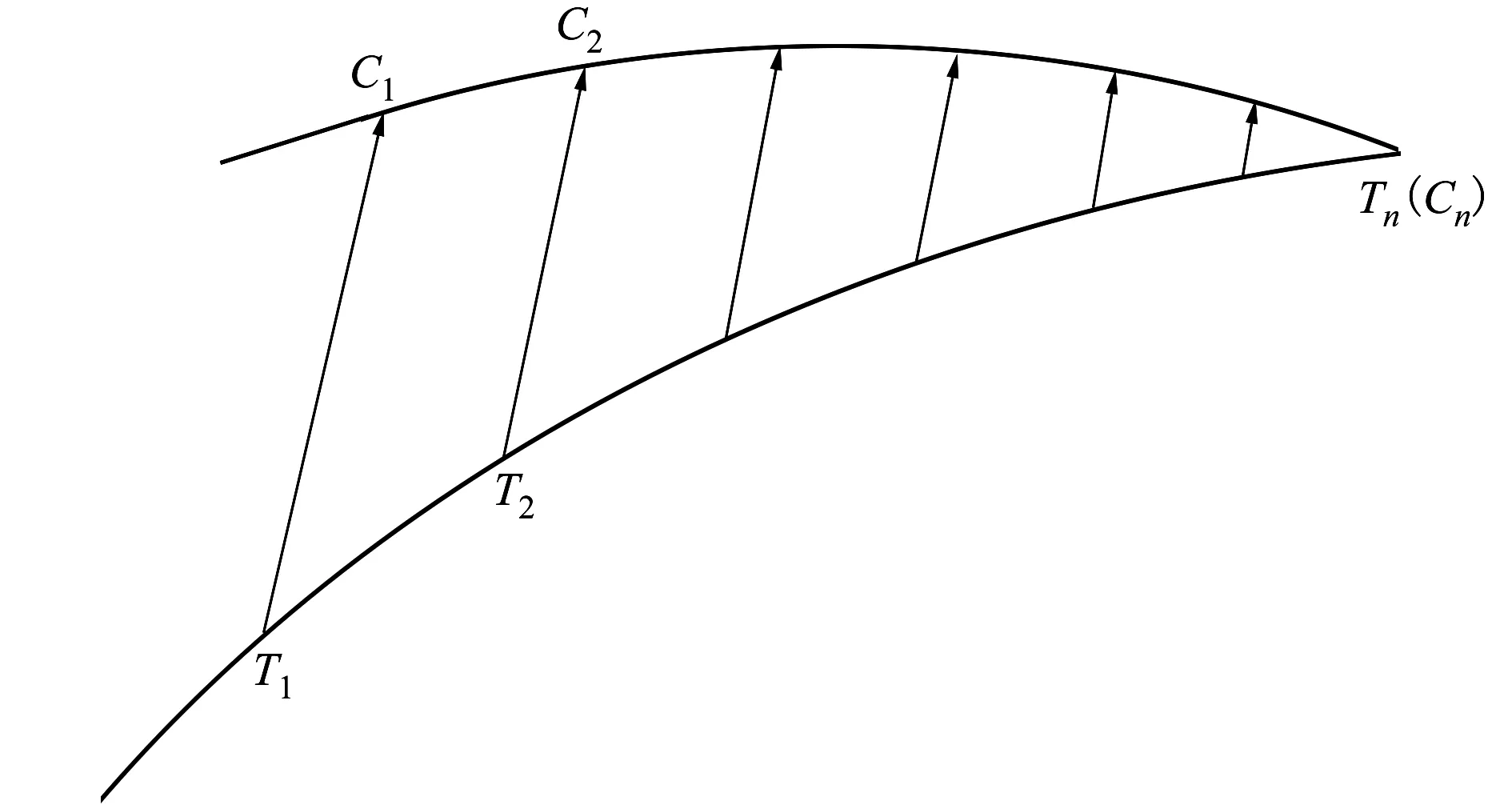
图1 平行接近法的示意图

图2 地磁仿生导航平行接近法示意图
以往的地磁仿生导航方法是在随机游走的模型基础上进行的,航向角变化丰富,不能很好地应用于飞行器导航。本文针对这一问题,设计了一种适用于飞行器的地磁仿生平行接近导航算法。如图2所示,在飞行器向目的地接近的过程中,计算求得当前位置k的航向角θk,使按照此航向角行进的单位步长下,不同地磁参量Bi,k(i=1,2,…,n)能保持相同比值接近各自目标点的地磁值Bi,T,即
(Bi,k+1-Bi,k)∝(Bi,T-Bi,k)i=1,2,…,n
(3)
2.2 地磁梯度仿生导航算法
1) 飞行器运动方程
在一个二维平面内,飞行器的运动方程可表述为
(4)
式中,(x,y)表示飞行器所在的位置,u为系统输入,也即与速度v和航向角θ相关的函数。
2) 航向角解算
假设飞行器的速度v是恒定的,那么导航输入u直接由航向角θ决定,即u=θ。所以地磁仿生导航的过程也就是航向角θ的求取过程,如图3所示。
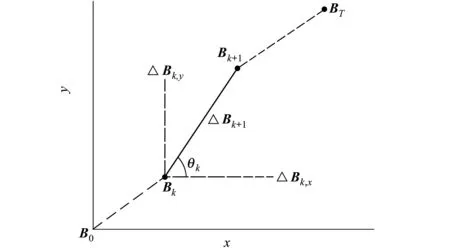
图3 行进方向预测示意图
图中,ΔBk为当前位置k与前一位置k-1的地磁差值,ΔBk,x,ΔBk,y分别为其x轴、y轴方向的分量。为使不同地磁参量Bi,k能以相同比值Mk接近各自目标点的地磁值Bi,T,(3)式可进一步写为
ΔBi,k+1=Mk·ΔBi,T,i=1,…,n
(5)
式中
根据平行接近导航策略,就是使下一时刻k+1相邻两步之间的地磁差值ΔBi,k+1平行接近当前点k与目标点T之间的差值ΔBi,T,也就是求得航向角θk,使当前位置k的不同参量比例系数相等,即Mi,k=Mj,k,(i≠j)。
(8)
(9)
由于上式中x轴、y轴方向的分量ΔBi,k,x和ΔBi,k,y并不好直接获得,本文引入地磁场梯度进行计算。因为地磁梯度表示的是地磁场在某点范围的变化量,假设k点与k+1点之间的距离足够小,可以认为相邻两点之间地磁差值ΔBi,k,x与该分量的梯度值gi,k大致相等。证明如下[15]:
定义函数Bi(x,y)有关变量x的偏导数dBi可写作
dBi(x,Δx,y)
(10)
如果Bi在x处可微,那么B的差值
ΔBi,xBi(x0,Δx,y)-Bi(x0,y)
(11)
满足
(12)
式中,增量Δx近似满足Δx→0。可以得到
ΔBi,x≈dBi(x,y)
(13)
地磁场梯度gi,k是安振昌学者[16]根据地磁场的高斯理论提出的
(14)
式中,gi,k,x和gi,k,y分别为地磁场梯度的x轴、y轴方向的分量。有关地磁场梯度具体的求导过程可以参考文献[17]。
于是(9)式可以改写为
(15)
从(15)式可以推导出
(16)
则航向角θk为
θk=arctan
(17)
由于反正切函数arctan(·)的取值范围在[0,π]之间,因此在求取航向角θk时,应注意角度方向。
3) 评价指标
本文根据目标函数的收敛性构建了评价指标体系。这个指标可以通过当前位置的地磁值Bi,k和目的地的地磁值Bi,T之间的差异来描述。即
qi(k)=|Bi,k-Bi,T|i=1,…,n
(18)
则评价指标Q(k)可设置为
(19)
当评估指标Q(k)达到极小值ε时,可以认为飞行器到达目标点,导航过程完成。
4) 误匹配点校正
假定地球磁场是一个理想的磁偶极子体,地球表面同一高度情况下的每个地磁场参量Bi的等值线都应该是一个圆。也就是说2个不同的地磁分量的等值线有可能存在2个交点P1和P2,而如果只用这2个地磁分量进行导航,在这2个交点处该分量地磁值是完全相同的,如图4所示,这就会导致误匹配问题。
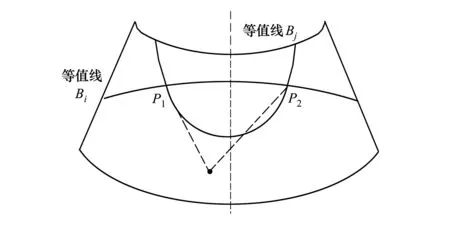
图4 导航误匹配情况示意图
但是当导航过程中P1和P2不在一个平面内的时候,2个地磁分量就可以完成导航任务。
众所周知地磁场具有丰富的地磁信息,但已知其中任意独立的3个地磁分量就可以推算出全部7个地磁分量。7个地磁分量间的相互推导关系见文献[18]。为避免导航过程陷入误匹配情况,本文引入第3个地磁分量对航向角进行辅助判断。当一段连续时间内,2个不同地磁分量的评价指标qi(k)和qj(k)一直存在收敛趋势,而第3个地磁分量的值ql(k)(l≠i,j)却明显开始增大,说明航向角求取过程陷入误匹配点导航。此时需重新选取2个地磁分量在当前点重新开始导航过程。
本文创新性地利用平行接近方法进行地磁仿生导航,并借助地磁场梯度信息,用地磁场趋势变化辅助航向角的求取。算法流程如图5所示。
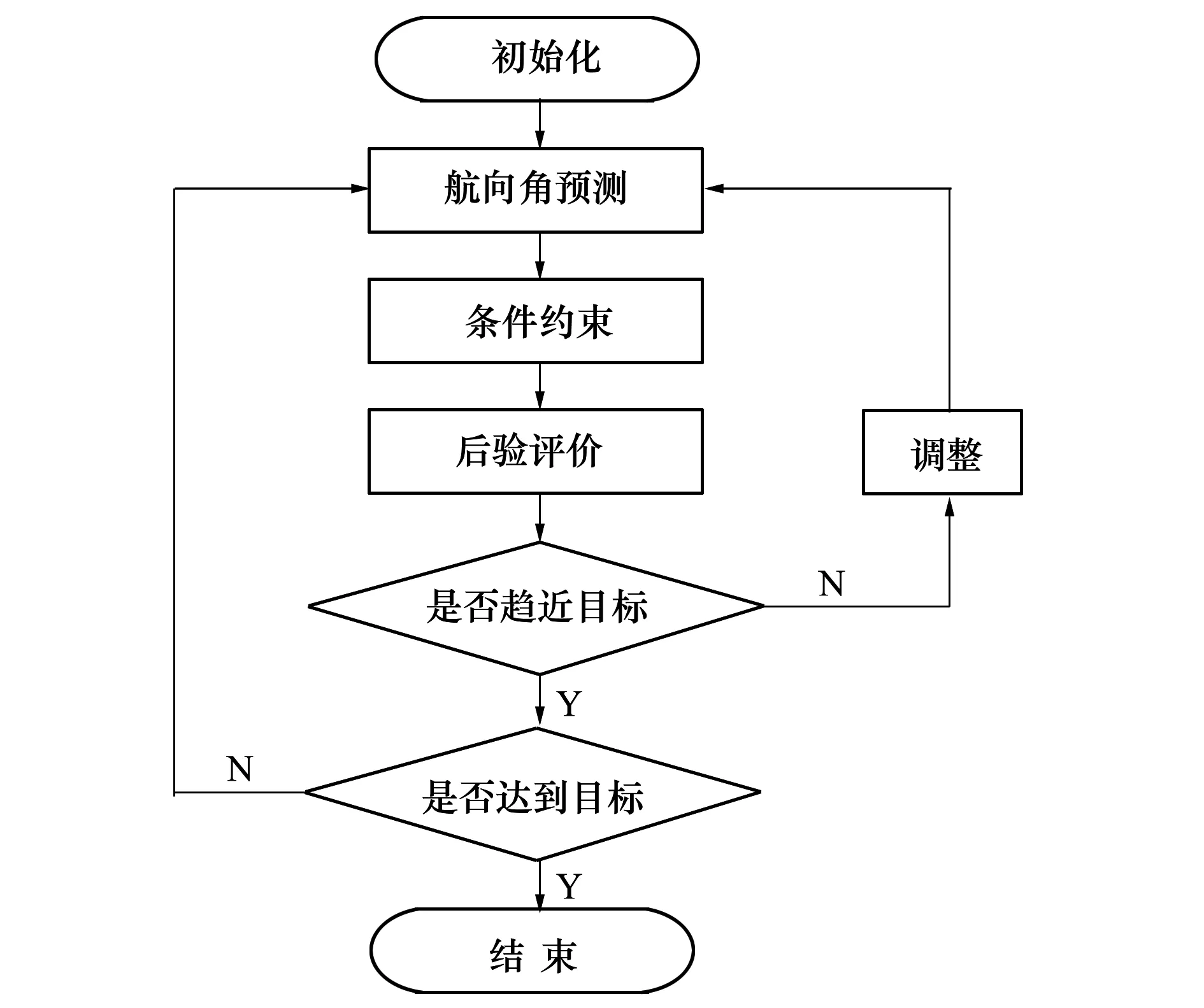
图5 比例梯度导引算法流程
3 仿 真
为了验证上述导航算法,本文采用国际地磁模型IGRF12模拟实际地磁场环境,并在Matlab中进行仿真验证。
下面首先不考虑误匹配情况,仅对本文所述平行接近地磁梯度仿生方法进行仿真实验。仿真过程用经纬度表示飞行器的位置信息(x,y),设定导航速度v的值约为0.1°经纬度值的大小。当飞行器所在位置与目标点的磁测数据的差值达到某一较小范围时,认为到达目的地,仿真结束。本次仿真任务中的评价指标设置为Q(k)<0.01。
1) 不同地磁参量作为导航线索
由于地磁场信息丰富,导航过程仅选取2种地磁参量用于解算导航信息,为说明本文方法的有效性,仿真过程中选取了如下3组不同的地磁分量进行实验:A组的导航线索为地磁场东向分量Bx、北向分量By;B组的导航线索为地磁场垂直分量Bz、水平分量H;C组的导航线索为磁偏角D、磁倾角I。最终实验结果如图6所示。
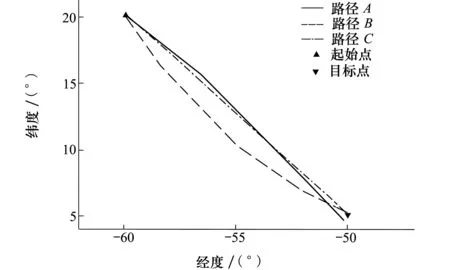
图6 从(-60,20)到(-50,5)的3组导航运动轨迹图
上图中导航起始点设置为(-60,20),目标点设置为(-50,5)。针对同一初始点到目标点的指令信息,仿真结果显示,在没有地磁图先验参考条件的情况下,采用本文地磁梯度仿生导航算法进行了3组实验,其导航过程虽然呈现不一致的导航路径,但最终均能完成导航到达目标点。
2) 相同地磁参量作为导航线索
关于相同的导航参量,选取不同的飞行路径进行导航实验。本次实验中地磁参量选取磁偏角D、磁倾角I,从相同的初始位置(图7中O点)开始,选取4个不同方向朝既定的目标位置(图7中A,B,C,D点)运动。实验结果如图7所示。
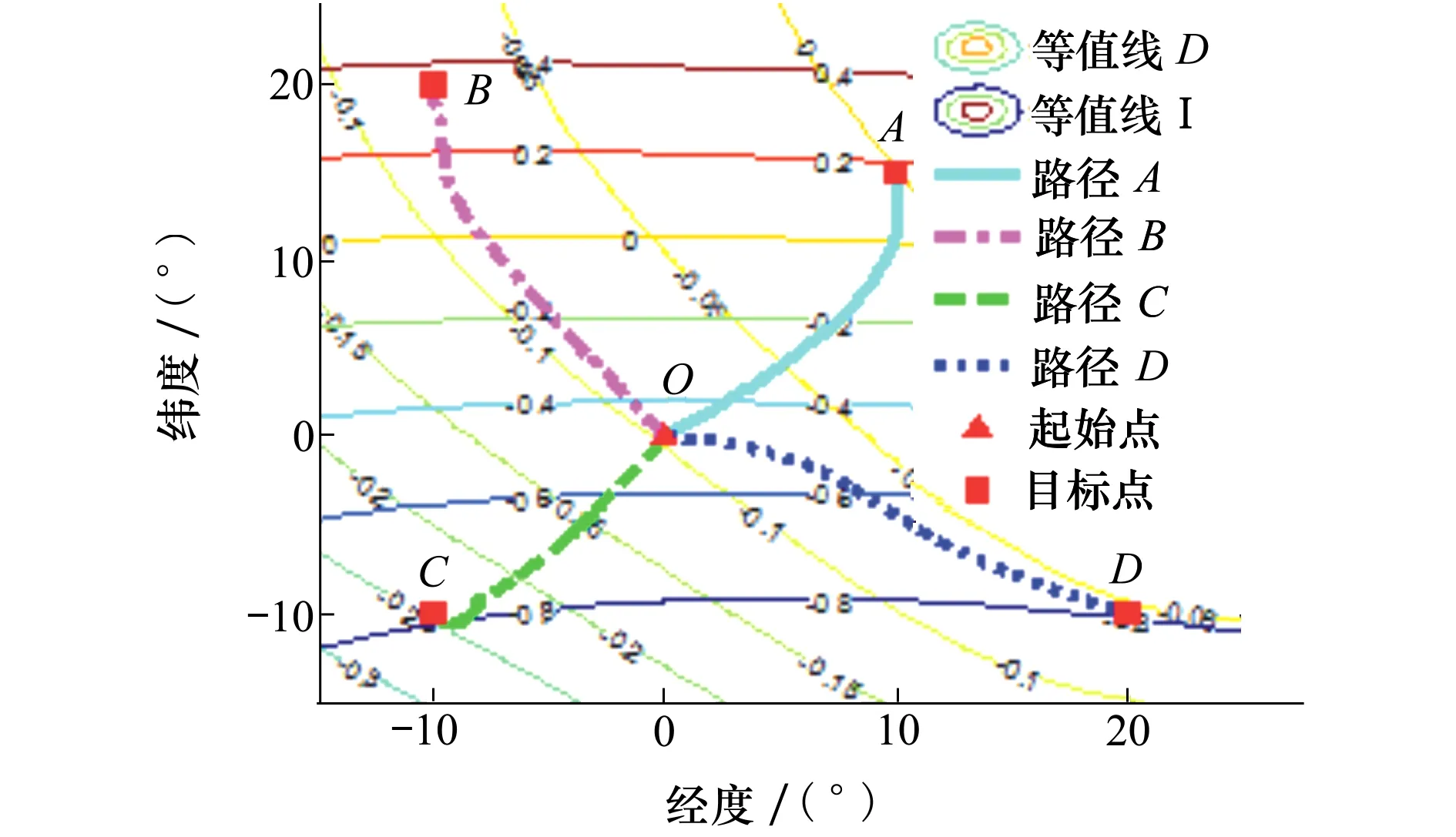
图7 相同导航参量的导航运动轨迹图
图7中,起始点O设置为(0,0)点,4个目标点的设置分别为A(20,-10),B(-10,-10),C(-10,20),D(10,15)。飞行器从起始点出发朝着4个不同的目标点飞行,随着时间的累积,4组导航运动根据地磁场的变化都存在明显逼近目标的趋势,结果表明4组实验都较好地完成了导航任务。
3) 与进化仿生导航的对比
为了与文献[11]中所述进化地磁仿生导航方法进行对比,选取实验2中导航运动轨迹OA作为参考,并同样设置进化仿生导航方法的导航参量为磁偏角D、磁倾角I,仿真对比结果如图8所示。
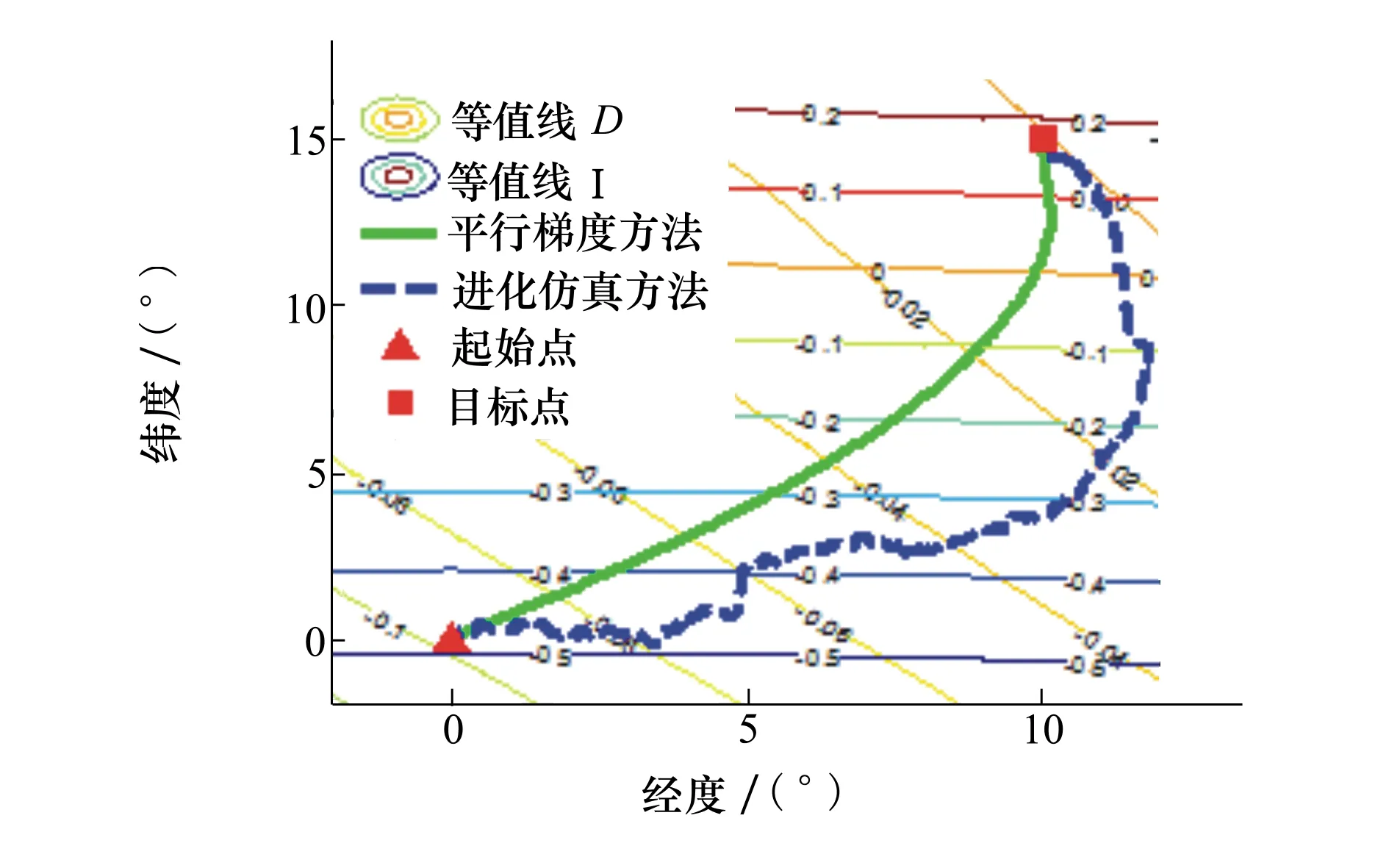
图8 与进化仿生导航轨迹对比图
从图8可以看出,2种导航方法从同一起点(0,0) 点出发向目标点(10,15)前进,最终都能完成导航到达目标点。由于进化地磁仿生导航方法借鉴了随机游走模型的思想,导航路径虽能逐渐趋于收敛,但是其随机搜索的过程导致航向角的变化较为丰富。本文方法的航向角θ随着导航过程缓慢变化,整体来说变化过程较为平缓,相对更适合应用于飞行器进行导航任务。
综合实验1、2、3,当导航过程中不存在误匹配点,即当P1和P2不在同一导航平面时,可以证明本文所述算法可以模拟无先验地磁图情况下的仿生导航过程。而且导航航迹路线比较平滑,基本满足飞行器导航任务的需求。
4) 误匹配点校正
前文对本文所述平行接近地磁梯度仿生方法进行了有效的验证,在绝大多数情况下,采用本文方法都能很好地完成导航。但是地磁场信息丰富,仅采用2个地磁分量进行导航,难免会由于信息量缺失导致误匹配,如图9所示。为解决这种状况,引入第3个地磁分量辅助进行导航,从而对匹配情况进行校正,如图10所示。
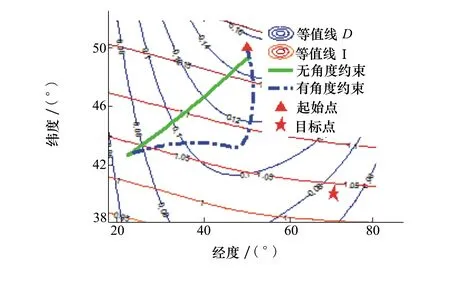
图9 导航信息误匹配轨迹图

图10 误匹配校正导航轨迹图
图9中,导航起点为(50,50),目标点设置为(70,40),直线表示的是飞行过程中没有航向角约束的情况,虚线为存在航向角约束的飞行轨迹。从图中可以看出,导航过程本应从起点出发往目标点行进,但是由于2个导航参量在误匹配点(23.3,42.7)的地磁值与目标点(70,40)的地磁值相同,均为D=0.072 nT,I=1.036 nT,从而导致导航过程发生误匹配情况。
为了解决这种误匹配状况,从导航过程起始就引入第3个地磁分量F进行辅助导航,如图10所示。一段时间后对导航过程进行判断,如果发现出现误匹配导航状况就采用其他地磁分量在当前点开始重新导航。同样,直线为没有加入飞行器航向角约束情况的飞行轨迹,虚线为存在航向角约束的误匹配点校正导航飞行轨迹。图9、图10的航向角约束均设置为θlimit<15°。
综上所述,本文方法可以较好地完成导航任务,并可以适用于飞行器的导航任务中。
4 结 论
本文针对地磁导航受地磁图等先验信息限制的问题,受平行接近法的启发,结合地磁场梯度信息提出了一种平行接近地磁梯度仿生导航方法。利用地磁场梯度信息使当前位置的地磁参量平行接近目标信息,进行航向角求解,从而可不依赖任何地磁先验信息进行地磁导航,并通过仿真验证了该方法的有效性。
在实验过程中发现,本文方法利用地磁梯度信息运用比例算法解算导航信息,在磁场信息较为平滑没有地磁干扰情况下导航效果较好,若磁场曲线比较迂回或者存在地磁干扰将对整个导航过程造成较大的影响,有关这一问题将成为本文后续的研究重点。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新高考·高一数学(2022年3期)2022-04-28
思维与智慧·上半月(2022年4期)2022-04-08
小哥白尼(神奇星球)(2021年4期)2021-07-22
新世纪智能(高一语文)(2021年3期)2021-07-16
空间科学学报(2020年3期)2020-07-24
现代职业教育·高职高专(2020年10期)2020-01-05
物理学报(2019年24期)2019-12-24
民用飞机设计与研究(2019年4期)2019-05-21
计算机应用(2016年10期)2017-05-12
