基于北斗卫星的动车组车体姿态检测方法与实现
2018-09-04 09:04:26谢韬杜亚江齐金平杨志飞谯泽诊
铁道科学与工程学报 2018年8期
谢韬,杜亚江,齐金平,杨志飞,谯泽诊
基于北斗卫星的动车组车体姿态检测方法与实现
谢韬1,杜亚江1,齐金平1,杨志飞2,谯泽诊3
(1. 兰州交通大学 机电技术研究所,甘肃 兰州 730070;2. 兰州交通大学 电子与信息工程学院,甘肃 兰州 730070;3. 乌鲁木齐铁路局,新疆 乌鲁木齐 830011)
为保障动车组安全运行,大风条件下运行的动车组车体姿态检测十分重要,目前还没有应用于实时运营动车组的车体姿态的检测系统且很少有研究关注。为此,提出一种基于北斗的姿态检测方法,通过建立基于该方法的车体测姿模型,利用北斗载波相位对车载天线进行双差观测,采用QR分解变换消除观测方程的坐标参数,并采用LAMBDA算法固定载波相位整周模糊度,进而解算出基线矢量,实现车体姿态检测。通过算例实现和实际装车测试,验证了所述方法的有效性。
北斗卫星;动车组;姿态检测;载波相位差分;模糊度解算
高速铁路技术快速发展,高速列车的安全平稳运行受到特别重视,兰新客专及南疆铁路等大风环境下的动车组车体运行姿态检测成为高速列安全运行管理和防风减灾设计所需的主要参数[1−2]。目前高速列车车体姿态检测方法主要有:采用微机电系统技术的测量方法[3];采用捷联惯导技术的测量方法[4];采用多CCD的机器视觉测量方法[2, 5]。结合运营动车组的实际需求,采用北斗导航卫星不仅可以获取安全高效的运动状态信息,也可测量载体三维姿态参数。基于北斗的载体姿态检测是通过安装于载体的天线接收卫星信号,测量各个天线相对位置在当地地理坐标系的矢量描述,并结合天线在载体坐标系的安装关系确定载体姿态。高精度基线解算普遍采用载波相位观测值,而由其测量机理引起的误差对于安装在动车组车体的短基线(一般2 m左右)有较好的空间相关性,利用差分技术可以使相关误差有效减弱或消除[6]。在航载波相位测量中整周模糊度的解算是关键,在研究既有算法的基础上[7−9],本文通过QR分解变换对载波相位双差观测方程进行解耦,消去了坐标参数,并采用LAMBDA算法对只含模糊度参数的观测方程进行模糊度固定,进而有效实现了动车组姿态检测。
1 动车组车体测姿原理
动车组车体姿态检测,是指动车组车体坐标系相对于当地地理坐标系的3个欧拉角,即:摇头角、侧滚角和点头角。通过在车体表面安装2~3个天线,利用天线接收机的载波相位测量值差分来求解基线矢量。
1.1 动车组车体测姿模型
通过当地地理坐标系到载体坐标系之间的转换反应车体的姿态,如图1所示具体为:当地地理坐标系绕轴逆时针旋转角,再绕(1)轴逆时针旋转角,最后绕(2)轴逆时针旋转,转换成动车组车体坐标系。
动车组车体坐标系(Body Frame System,也称b系),原点定义在天线阵列参考天线的相位中心,轴与行车放向一致,轴垂直指向车体右侧,轴与和轴构成右手坐标系。
当地地理坐标系(Local Level System,也称l系),常作为姿态检测中的参考坐标系,原点与参考天线相位中心重合,,和坐标轴分别是相互垂直的东向(E)、北向(N)和天向(U),因此又称O-ENU坐标系。
1.2 载波相位差分测向原理

任意天线到卫星的载波相位原始观测方 程为:


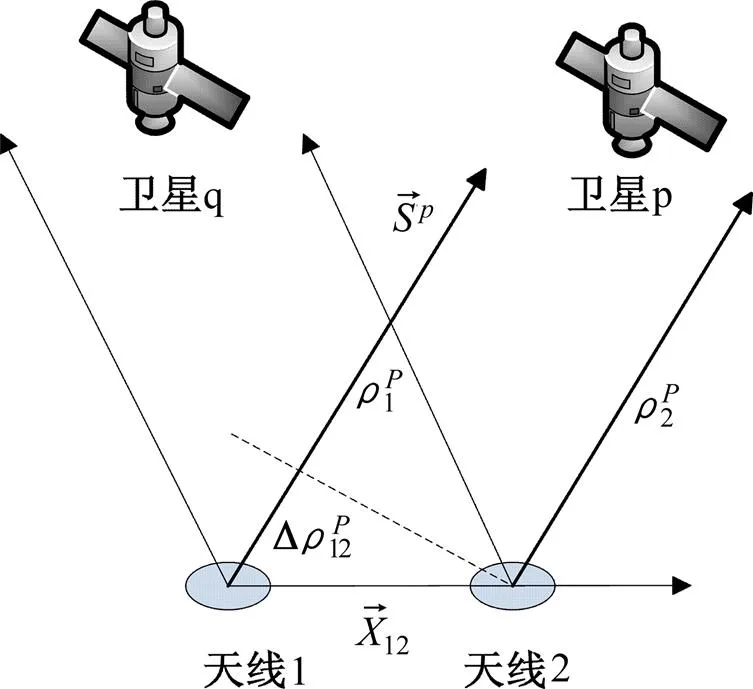
图2 北斗卫星测姿原理图
在同一历元,将天线1和天线2到卫星的原始观测方程差分后的单差观测方程为:

式中:表示单差;为单差残差。较之于原始观测方程(2),单差方程消除了观测模型中的卫星钟差项。对于短基线而言由于载波相位传播路径基本相似,因而电离层和对流层延迟对于短基线天线的影响相似,可以彼此抵消忽略不计[7]。则式(3)简 化为:

考虑同一历元下,天线1和2分别对不同的卫星和单差观测方程再次差分的双差观测方 程为:

式中:表示双差;为双差残差。较之于原始观测方程(2)双差观测完全消除了钟差项。

结合式(5)~(6)得:

载波双差观测方程确定后,因为2个测站站点及星历已知,当双差整周模糊度精确固定,则可由式(7)解算基线矢量,因此整周模糊度的解算是 关键。
2 整周模糊度解算
整周模糊度确定一般分为2个步骤:一是计算模糊度浮点解,即将模糊度参数与其他参数一并求解。二是通过搜索算法将模糊度实数解约束为整数,进一步固定基线解[7]。
2.1 整周模糊度浮点解
对于短基线载波相位双差观测量,假设2个天线共同观测的卫星数为+1,对某一历元建立个双差观测方程。其简化的线性化双差观测方程 组为[10]:


对于个历元如下表示:
将上式简化为:

4) 最小二乘法求解线性方程,模糊度浮点 解为:

模糊度相对应的协因数为:

2.2 模糊度搜索






需要指出的是,按星历计算的卫星位置以及伪距定位得出的天线位置均属于地心地固坐标系(ECEF),北斗系统采用的是CGCS2000坐标系。必须经过坐标变换到当地地理坐标系(北天东坐标系)O-NEU,可得:
式中:和分别是参考天线所在地理位置的的经度和纬度;X,Y和Z分别为O-NEU坐标系下的分量。然后按式(18)计算动车组的摇头、侧滚二维姿态角:

单基线只能测量载体二维姿态,对于三维姿态检测,如果再加一根基线与所述基线垂直布置即可得点头角,测量方法与双天线一致。
3 算例实现与测试
3.1 算例实现
算例实现基于自主开发的RAM+OEM构架的北斗接收机。整体实现流程为:建立工程管理文件®数据导入®构建载波相位双差观测方程®平差计算模糊度浮点解®模糊度搜索(LAMBDA搜索)®姿态解算。其中的2个主要流程如图3所示。

(a) 模糊度浮点解流程;(b) 模糊度搜索流程
3.2 测试结果分析
随着接收机电气特性的提升,采用载波相位动态测量时,模糊度可靠固定是主要时间开销。为此对程序运行速度进行测试,在MATLAB2012a环境的profiler工具进行,所用PC的系统型号为ASUS k42de,CPU时钟周期为2.1 GHz。测试中采用 4维数据输入(即共同观测卫星为5颗考虑),程序运行相关时间开销如表1所示。

表1 程序运行时间开销
由表1可知,所述程序运行总开销只需17 ms,采用LAMBDA降相关变换和模糊度搜索固定时间为分别为5.6 ms和7.2 ms,是整个程序的主要时间开销。程序整体上运行稳定,解算时间快,可用于动态测量。
实车测试中,根据试验动车组TRAIN-SET5型车天线的安装工况选择双天线模式,天线安装于头车车体导流罩内中轴线为对称轴的对称位置。2016年5月,在南疆线前百里风区吐鲁番至鱼儿沟间进行往返试验,现场最高试验速度80 km/h,最高风速43.2 m/s。为验证本文所述方法,采用多时段的20个样本,每样本点取100个测量数据的方法,并按动车组静置(即车速为0)和运行2种工况分别 统计。
静置工况的姿态样本均方差统计结果如图4所示。由图4可知,侧滚角和摇头角均方差最差分别为0.464°和0.169°。如以多组样本均方差均值来作为精度参考值[9],则分别是0.214°和0.097°。考虑风对车体作用的脉动性和随机性,与文献[11]和文献[15]中2 m基线时摇头角均方差的0.073°和0.049°比较基本处于同一水平。
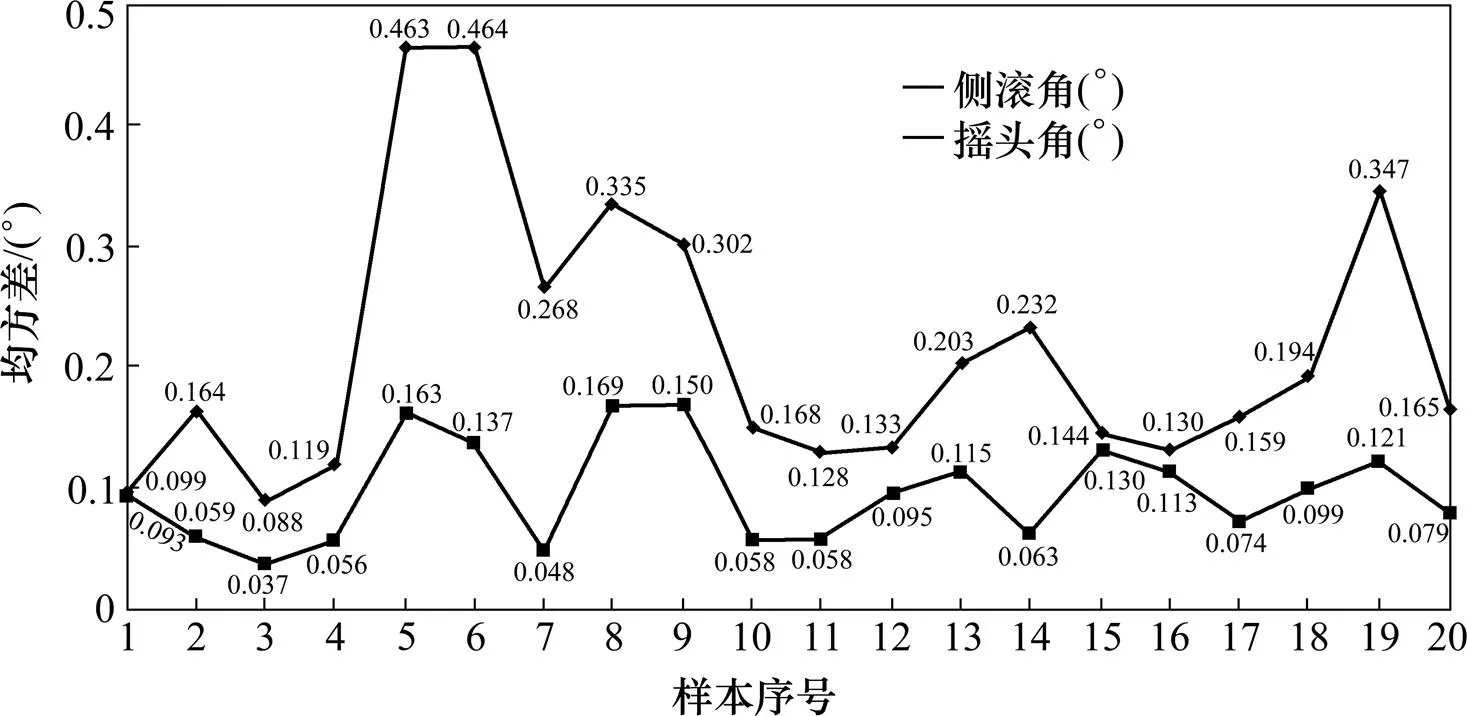
图4 静置状态姿态角均方差
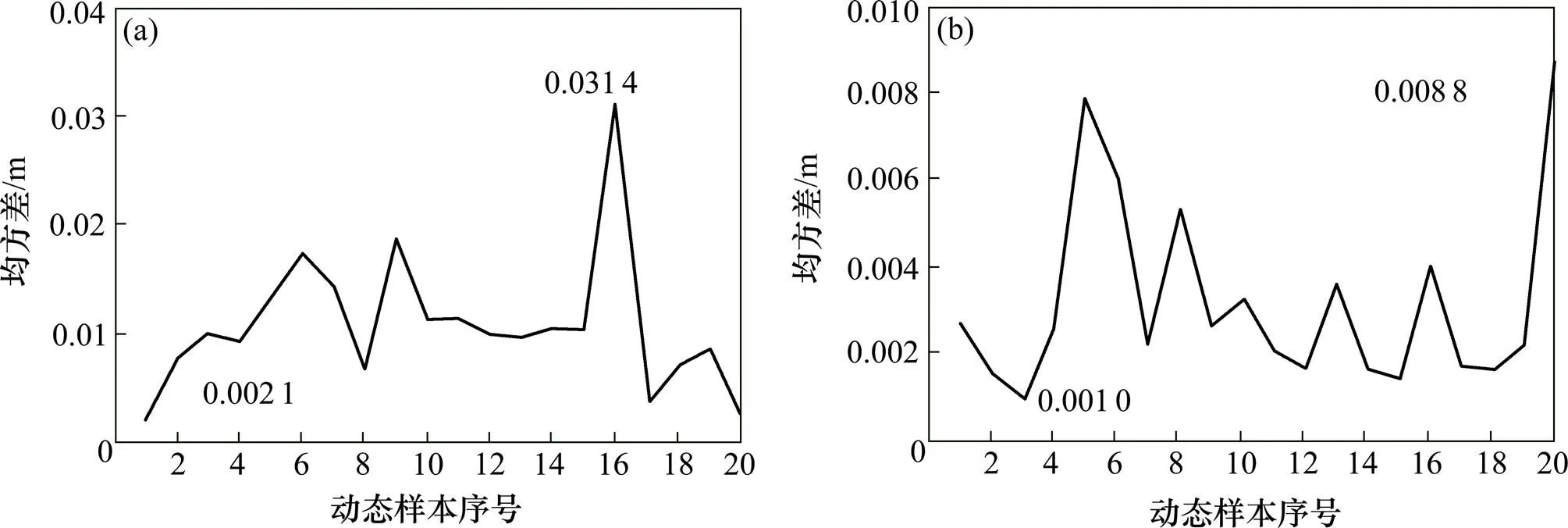
图5 基线长度解算均方差
动车组运行状态中,车体侧滚角和摇头角的测量是风−车−路耦合作用的结果,姿态角具有不确定性偏差,无法用标准差直接估计。但2种工况中,北斗天线与车体都是固定连接,而摇头角和侧滚角解算误差是基线矢量解算误差在当地水平面及过基线法平面内的投影[9],静态和动态基线长度解算均方差统计结果如图5所示。
由图5可知,静置、运行工况的基线长度解算均方差最差分别是0.008 8 m和0.031 4 m。若以多组样本均方差均值来作为精度参考值,则分别是0.003 2 m和0.010 9 m。与文献[15]中2.004 m的基线长度解算均方差2.051 mm比较基本在同一水平。参考文献所述测试往往是在特定的测试环境,卫星信号质量较好。考虑本文实车测试时的风−车−路耦合复杂环境中车体变形、天线安装的晃动、多路径效应等因素,此统计精度应属保守估计。
4 结论
1) 利用北斗载波相位差分定位技术可以实现动车组车体的侧滚角、摇头角的姿态检测。
2) 采用所述方法,在大风环境试验工况下,以均方根误差均值作为精度参考值的试验车辆车体摇头角均方根误差小于侧滚角,分别是0.097°和0.214°。
3) 大风环境试验工况下,车体运动状态的姿态角解算均方根误差大于静置状态,与同类技术在特定环境应用工况比较基本处于同一水平,可以实现风−车−路耦合复杂工况下动车组车体姿态的动态检测。
[1] 韩邦杰, 程大林, 李晓雷. 高速列车姿态检测系统理论基础研究[J]. 舰船科学技术, 2012, 34(增1): 91−94. HAN Bangjie, CHENG Dalin, LI Xiaolei. High-speed train posture measurement system theory basic research [J]. Ship Science and Technology, 2012, 34(Suppl 1): 91− 94.
[2] 米希伟, 鲁寨军, 钟睦. 大风条件下动车组滚摆振动特性研究[J]. 铁道科学与工程学报, 2016, 13(5): 806−811. MI Xiwei, LU Zhaijun, ZHONG Mu. Research on the rolling pendulum characteristics of the train-set under strong wind[J]. Journal of Railway Science and Engineering, 2016, 13(5): 806−811.
[3] 赵桂林, 杨国伟. 高速列车运行姿态参数测量系统[P]. CN:102445176A, 2012−05−09. ZHAO Guilin, YANG Guowei. High-speed train running posture parameters determination system[P]. CN: 102445176A, 2012−05−09.
[4] 井世丽. 采用捷联惯导技术测量高速列车姿态[J]. 舰船科学技术, 2012, 34(增1): 99−101. JIN Shili. High-speed train running attitude determination based on strap-down inertial navigation system[J]. Ship Science and Technology, 2012, 34(Suppl 1): 99−101.
[5] 田红旗, 梁习峰, 刘应龙, 等. 铁路机车车辆运行姿态测量系统[P]. CN: 101580071A, 2009−11−18. TIAN Hongqi, LIANG Xifeng, LIU Yinglong, et al. Rail vehicle posture measurement system[P]. CN: 101580071A, 2009−11−18.
[6] Teunissen P J G. Integer least-squares theory for the GNSS compass[J]. Journal of Geodesy, Springier, 2010, 84: 433−447.
[7] Morales-Reyes A T, Erdogan T, Arslan A. distributed cellular GA-based architecture for real-time GPS attitude deter-mi nation[C]// IEEE. Congress on Evolutionary Computation, 2009: 2049−2054.
[8] Buist P J. The baseline constrained LAMBDA method for single epoch, single frequency attitude determination applications[C]// ION-GNSS 20th International Technical Meeting of the Satellite Division. Texas: Fort Worth, 2007: 2963−2973.
[9] 吴美平, 胡小平, 逯凉清, 等. 卫星定向技术[M]. 北京: 国防工业出版社, 2013. WU Meiping, HU Xiaoping, LU Liangqing, et al. Navigation satellite orientation determination method[M]. Beijing: National Defense Industry Press, 2014.
[10] 唐卫明, 李笛, 迟凤明. 北斗卫星导航系统单历元定向算法研究[J]. 武汉大学学报(信息科学版), 2013, 38(9): 1014−1017. TANG Weiming, LI Di, CHI Fengming.Research on single epoch orientation algorithm of COMPASS navigation atellite system[J]. Geomatics and Information Science of Wuhan University, 2013, 38(9): 1014−1017.
[11] 张豪. 一种快速确定GPS整周模糊度的方法[J]. 火力指挥与控制, 2014, 39(10): 27−29. ZHANG Hao.A resolution method of GPS integer ambiguity rapid determination[J]. Fire Control and Command Control, 2014, 39(10): 27−29.
[12] Teunissen P J G. A canonical theory for short GPS baselines part II: the ambiguity precision and correlation[J]. Journal of Geodesy, 1997, 71: 389−410.
[13] 秦红磊, 陈万通,金天, 等. 新的GPS单频单历元定姿算法[J]. 北京航空航天大学学报, 2011, 37(9): 1063− 1069. QIN Honglei, CHEN Wantong, JING Tian, et al. New attitude determination algorithm for single epoch, single frequency using GPS[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(9): 1063−1069.
[14] 袁晓宇, 李峰, 胡文涛. 基于北斗的车载接收机航向测量技术研究[J]. 导航定位与授时, 2014, 2(9): 54−58. YUAN Xiaoyu, LI Feng, HU Wentao. Research on BD satellite receiver technique about course determination[J]. Navigation Positioning and Timing, 2014, 2(9): 54−58.
[15] 任光辉, 茅旭初. 多约束条件的全球定位系统单频单历元短基线定向技术与实现[J]. 上海交通大学学报, 2014, 48(3): 335−340. REN Guanghui, MAO Xuchu. Single frequency and single epoch short-baseline GPS orientation determination method and realization with multiple constraints[J]. Journal of Shanghai Jiaotong University, 2014, 48(3): 335−340.
(编辑 阳丽霞)
Realization of train-set bodies posture determination method based on COMPASS
XIE Tao1, DU Yajiang1, QI Jinping1, YANG Zhifei2, QIAO Zezheng3
(1. Mechatronics T & R Institute, Lanzhou Jiaotong University, Lanzhou 730070, China; 2. Electronics and Information Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China; 3. Urumqi Railway Bureau, Urumqi 830011, China)
To ensure the safe operation of the train-set, the train-set bodies posture determination has become significantly important under the strong wind condition. However, there is no train-set bodies posture determination system application in the real-time operating train-set and few studies have focused on. This paper put forward a kind of posture determination method based on COMPASS. A posture determination model was built based on COMPASS. The double carrier phase differential observation antennas on train-set were used, and the coordinate parameters of the observation equation were eliminated by the QR decomposition transformation. Moreover, LAMBDA algorithm was used to fix the integer ambiguity of carrier phase and then calculates the baseline vector consequently. Through the realization of the calculating examples and the actual loading test, the described method realize train-set bodies posture determination effectively.
COMPASS; train-set; posture determination; carrier phase differential; ambiguity resolution
10.19713/j.cnki.43−1423/u.2018.08.003
TN201
A
1672 − 7029(2018)08 − 1920 − 08
2017−05−26
中国铁路总公司科技研究开发计划资助项目(2015T002-D);甘肃省财政厅基本科研业务费资助项目(214153)
齐金平(1978−),男,山东诸城人,副教授,博士,从事轨道交通装备检测及其信息化技术研究;E−mial:46067143@qq.com
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18 06:41:26
大地测量与地球动力学(2022年1期)2022-01-11 10:23:02
大地测量与地球动力学(2021年10期)2021-04-17 00:51:00
海峡姐妹(2020年2期)2020-03-03 13:36:34
铁道通信信号(2018年11期)2019-01-19 01:14:54
石油地球物理勘探(2017年4期)2017-12-18 07:14:49
制造技术与机床(2017年12期)2017-02-02 07:05:03
电力系统及其自动化学报(2016年5期)2016-12-01 03:13:00
铁道通信信号(2016年11期)2016-06-01 12:11:26
焊接(2015年1期)2015-07-18 11:07:33