一种卫星导航接收机的快速定位算法
2018-09-03 00:55:38杜道成黄智刚陈彦晓
导航定位学报 2018年3期
杜道成,黄智刚,陈彦晓
(北京航空航天大学 电子信息工程学院,北京 100191)
0 引言
卫星导航技术的快速发展使用户对接收机首次定位时间要求越来越高。国外Sirf、U-Blox公司的主流导航产品热启动首次定位时间已达到1 s以内。近年来国内对热启动兴起研究热潮[1-6],使得热启动的首次定位时间缩短至3 s以内。
由于导航卫星信号的发射时刻是由接收机通过跟踪、位同步和帧同步获得的,要想减少首次定位时间,达到快速定位的目的,可以通过推测发射时间来实现。文献[6-7]提出了一种称为Range-Fit的时间重构法,该方法使用较为准确的本地时间对卫星的位置进行估算,再使用卫星位置和本地位置估算出伪距,直接跳过帧同步,使得首次定位时间大为缩短;但该算法需要较为精确的本地时间以及位同步,才能重构出卫星发射时间。文献[8]则提出了一种不需要十分精确的发射时间的快速定位算法;但由于每一次进行最小二乘迭代时都需要用更新后的发射时间计算卫星位置,因此计算量较大。
本文结合全球定位系统(global positioning system,GPS)的特点,提出一种快速热启动算法,以期能够在不经过位同步和帧同步的状态下,较准确地预测出卫星的发射时间。
1 发射时刻的构成
以GPS的中圆地球轨道(medium Earth orbit,MEO)卫星为例,对于使用伪码测距,其卫星信号的发射时间TTOT[9]为
TTOT=TOW+Nbit·0.02+NCA·0.001+
φCA·(0.001/1 023)
(1)
式中:TOW为接收机通过帧同步后获得的当前子帧的星期内秒,其测距精度为6 s;Nbit为接收机通过位同步后获得的当前比特计数值,其测距精度为20 ms;NCA为接收机通过跟踪环路获得的码周期计数值,其测距精度为1 ms;φCA为接收机通过跟踪环路获得的码相位值,其测距精度为1/1 023 ms。
根据接收机的工作原理[10],在获取测量信息的时候,得到的测量值往往是由小到大获取的,即:先从跟踪环中得到NCA和φCA的值;再经过位同步后,得到Nbit的值;最后经过帧同步后解析出TOW的值。由此可见,较大的测量值量级往往在最后才能得到,而帧同步又需要花费较长的时间;因此如何减少帧同步时间和位同步时间,甚至跳过帧同步和位同步,则成为了快速定位主要应该解决的问题。
2 发射时刻预测法





式中c为光速。
当注入的本地位置与真实的本地位置相差在300 km以内时,可以用四舍五入方法得到推测的发射时刻[13]为

(5)
式中:Ti,chip和Ti,chip_phase分别为码片和码相位的观测量;round()表示对数值的四舍五入取整运算。
3 发射时刻预测法的成立条件

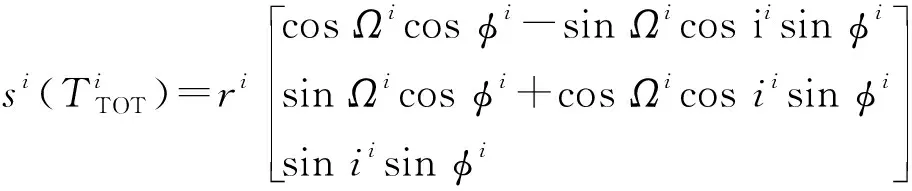
式中:ri为第i颗卫星到地心的距离;Ωi为赤径角,可以通过星历中的相关参数计算得到;φi为第i颗卫星的纬度值,同样可以通过星历中的相关参数计算得到;ii为第i颗卫星的轨道倾斜角,通过星历参数可以计算得到,其计算公式为
式中:i0为星历参考时刻下的轨道倾斜角;(di/dt)为倾斜角的变化率。

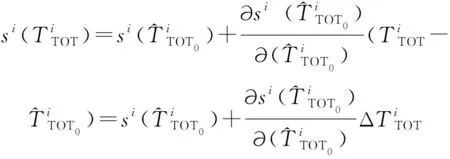
根据式(8),可以得到卫星发射时刻的位置误差为

用户与卫星的相对位置如图1所示。
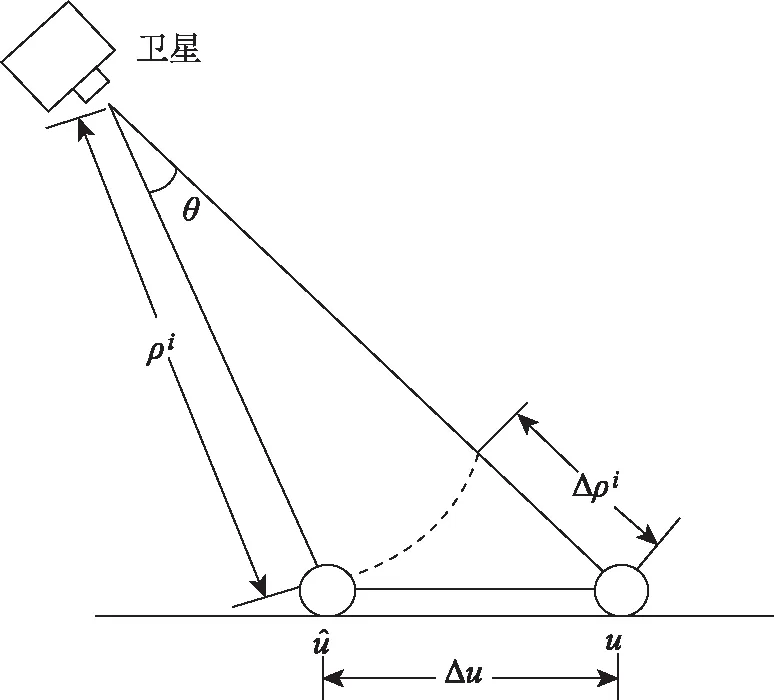
图1 用户与卫星的相对位置

根据余弦定理,并对θ求偏导,可得
由式(10)可知:当θ=0°时,Δρi有最大值Δu。
4 快速定位算法
对于GPS系统,已知标准的定位解算方程为



已知线性化的测量方程为Δρ=H·Δu,利用最小二乘的求解公式,可得其解为
Δu=(HTH)-1HTΔρ
(14)
其中

将式(15)得到的数值用于牛顿迭代及最小二乘运算,直到算法收敛,则可以得到精确的位置信息。
程序在硬件平台上的整体控制流程如图2所示。算法通过数字信号处理器(digital signal processor,DSP)和现场可编程门阵列(field-programmable gate array,FPGA)实现,使用从接收机跟踪环路中获得毫秒级以下的发射时刻观测量,结合发射时刻预测法预测的毫秒级以上的发射时刻,得到最终的卫星发射时刻;然后通过求解5个未知量的定位方程组得到接收机位置。
5 实验与结果分析
对上述算法进行仿真验证。选取2015-01-20 T 02:00:00的GPS 星历作为已知星历数据。设定用户定点在WGS-84下的3维坐标为(-2 144 838.63 m,4 397 570.88 m,4 078 017.71 m)。使用的 GPS卫星为 2号、5号、6号、7号、10号、13号、15号、29号、30号,其仰角分别为 58、73、14、12、22、51、19、45、14°。程序不进行位同步和帧同步,使用毫秒级以下发射时间观测量,并且将用户初始位置的3维坐标均加上50 000 m误差,即初始位置设置为(-2 194 838.63 m,4 447 570.88 m,4 128 017.71 m),以2015-01-20 T 02:00:00为初始时刻,连续进行1 500 s定位。经最小二乘法处理,定位结果如图3、图4所示。
图2 快速定位算法程序控制流程

图3 使用精确初始位置下的快速热启动定位结果
由图3~4可知,2组定位结果误差均在允许范围内,接近用户位置的真实值,在初始位置3维坐标偏差50 km的条件下,定位精度仍可达到σ0=5.346 07 m,验证了该算法的可行性。此外,将此快速定位算法应用到GPS接收机中,在实际的外场进行实验,通过反复上电,记录了10次首次定位时间,结果如表1所示。

图4 使用误差为50 000 m的初始位置下的快速热启动定位结果
表1 静态环境下的快速定位测试结果
结果表明,在已知卫星星历、接收机位置和本地时间的前提下,应用此快速定位算法,接收机平均首次定位耗时约2.8 s,有效缩短了首次定位时间。
6 结束语
本文使用理论分析加仿真验证的方法对GPS导航接收机的快速定位算法进行了研究,并将此算法在GPS接收机中进行了测试,首次定位时间满足接收机设计要求。在已知的GPS有效星历和误差小于300 km的粗略本地位置的基础上,本文的算法能够在不经过位同步、帧同步以及电文解调的基础上进行快速定位解算。算法使用推算的毫秒级精度的信号发射时刻,加上接收机跟踪环路测得的毫秒级以下的时延,重构出发射时刻,有效缩短了首次定位时间,达到了快速定位的目的。
猜你喜欢
科学(2020年3期)2020-01-06 04:02:51
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
上海公路(2018年4期)2018-03-21 05:57:46
电子制作(2017年7期)2017-06-05 09:36:13
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50
电测与仪表(2014年8期)2014-04-04 09:19:36