
基于WLAN的大型船舶舱体内部指纹定位算法
2018-09-02 11:08许智勋
舰船科学技术 2018年8期
许智勋,高 尚
(江苏科技大学 计算机科学与工程学院,江苏 镇江 212003)
0 引 言
随着现代信息技术的发展,船舶设备的信息化水平也迅速提升[1]。其中,船舶导航定位系统一直以来都是保障船舶安全航行的重要助航系统,并朝着综合化、精确化、垂直化的趋势发展[2]。对于大型船舶而言,设计尺寸、建造结构、舱内环境都日趋复杂,舱体内的人员位置难以锁定,将容易造成施工易迷路、作业效率低、紧急搜救难度大等问题。大型船舶舱体内的人员定位研究对船舶的设计建造、日常作业、救援保障等方面有着重要的意义。
船舶导航定位领域常用的技术有卫星定位技术[3]、传感器定位技术[4]和无线通信网络定位技术[5],具体包括GPS定位、北斗定位、红外线定位、超声波定位、超宽带定位、射频定位等。卫星定位技术在船舶导航方面有成熟的沉淀积累,然而,由于多径干扰、非视距传输、信号衰减等原因[6],卫星微波信号无法穿透船舱建筑,提供舱体内的定位服务。传感器定位技术能够实现高精度定位,然而,需要大量的硬件部署,且要求定位空间内的各项环境指标长时间保持不变。无线通信网络定位技术可利用现有通信网络进行定位,无需额外的硬件部署,其中WLAN定位技术采用2.4 GHz公开频段及应用广泛的IEEE 802.11标准[7],具有容易部署、应用范围广、环境适应能力强等特点[8],更符合舱体内定位环境和定位精度的需求。文献[9]设计了基于二维码指纹的主动式舱体内定位方法;文献[10]利用Zigbee技术进行舱内人员定位;文献[11]设计了船舶舱体内的超声波定位系统;文献[12]提出了超宽带技术,用于舱内船员的救援监测。
本文在综合考虑船舱内环境、精度要求、硬件部署及算法实现等因素,提出了基于WLAN的舱内指纹定位方法。并针对定位各阶段提出定位算法和AP选择算法,与传统定位算法和AP选择算法相比,提升了船舱内环境下的定位精度。
1 WLAN指纹定位模型
WLAN是一种基于IEEE802.11标准的无线局域网业务。在WLAN的网络覆盖区域内,若干接入点(AP)分散于空间各处,其信号的收发符合无线电磁波的传播规律,可以利用数学模型将传播信号转化为确定性的长度、角度等参数,或者概率性的指纹特征参数。
WLAN指纹定位流程如图1所示。位置指纹是一种在信号特征与地理位置间建立起来的映射关系。通过离线阶段采样收集数据,按照约定的规则存储,形成指纹数据库;在线阶段实时采集接收信号强度(RSS),经特征提取后与指纹数据库进行比对,找出等同或相似的一一映射关系,估算出待定位点的位置坐标。RSS衰减模型表示如下:


图1 WLAN指纹定位流程Fig. 1 WLAN fingerprint positioning process
1.1 离线训练阶段
如图2所示,离线训练阶段需要对定位空间划分采样网格,在各采样网格内采集RSS指纹数据,构建指纹数据库。图2中,定位区域划分为4行7列的网格(共28个网格点),2个AP。在每一个网格点上,利用移动通信设备及进行一段时间的数据采样(5~15 min,每秒采集一次)得到来自各个AP的平均RSS,采集时考虑移动设备不同的朝向和角度。

图2 RSS指纹离线采集与训练Fig. 2 RSS fingerprint offline collection and training
图3为在二维信号空间中展示的RSS指纹分布。当AP数量扩展到,则指纹将扩展为维。

图3 二维RSS指纹分布Fig. 3 Two-dimensional RSS fingerprint distribution
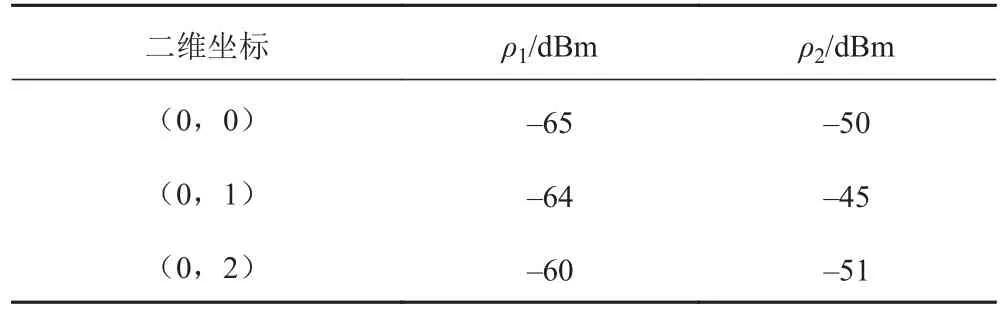
表1 RSS指纹数据库Tab. 1 Example Fingerprint Database
1.2 在线估算阶段
在线估算阶段,移动设备处于定位空间内,但是不知道它的具体位置坐标。假设待定位点处采集到的RSS向量为需要将在线采集的RSS向量与离线指纹数据库中的数据进行匹配,找出最接近的指纹,通过指纹的坐标来代替或者估算出待定位点的位置。如果那么最匹配的样本是表1中的第1项,移动设备被定位于坐标处。
如图4所示,虚线表示指纹匹配采用的决策边界,白色圆圈为待定位点,在决策边界内有一个RSS指纹与白色圆圈接近,则可用该指纹对应的坐标作为待定位点的位置坐标。常用的指纹匹配算法有K近邻算法和朴素贝叶斯算法。

图4 在线匹配估算Fig. 4 Online match estimate
2 贝叶斯分簇定位算法
定位空间中,将第i个参考点处的RSS向量记为待定位点处观测到的RSS向量记为则其中表示该观测点处可视AP的数量。若定位空间内共有个参考点,则共有组指纹数据,记为与各组指纹有映射关系的参考点位置记为表示相应位置坐标。计算实时采集的在各个参考点位置上的后验概率用于表示某个参考点上能产生的概率。计算方法下式:


确定了概率和最大的簇之后,其中各参考点的后验概率将用于进一步的位置估算。后验概率越大,则越接近定位目标,反之亦然。因此,继而通过簇内各点的后验概率,便可估算出目标点的坐标。

3 基于信息增益的AP选择改进算法
3.1 算法流程
由于并非所有可视AP均对定位有相同贡献[13],所以需对AP进行选择,剔除无用AP,选取最佳AP子集用于定位。
本文所提的AP选择算法流程,如图5所示。在各网格采样点采集可视AP的RSS数据,将全体可视AP组成初始AP集合;计算出每个AP的信息增益值;在信息增益值的基础上,分析出AP在相邻AP中的可辨性,以反映一个AP的与其他AP之间的区分程度;将所有可视AP依照可辨性进行综合降序排列;选取前个AP组成筛选后的AP子集,建立位置指纹数据库,作为在线定位阶段的输入。
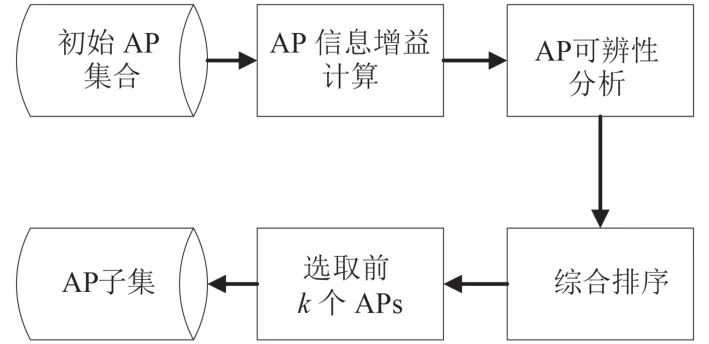
图5 AP选择流程图Fig. 5 AP selection flow chart
3.2 信息增益计算
首先给出单个AP的信息增益的计算,如下式:


3.3 综合可辨识性计算

4 仿真与实验结果分析
根据本文提出的算法,选取包含12个房间1条走廊的一个楼层进行仿真实验。各房间房门关闭,以模拟船舱的封闭式状态。选取经典的K近邻算法[14]、朴素贝叶斯算法[15]2种定位算法同贝叶斯分簇定位算法进行对比;选取Max-Mean算法[16]和InfoGain算法[17]2种AP选择算法与本文基于信息增益的AP选择改进算法进行对比。
定位算法仿真结果如图6所示,可以看出,本文算法在定位精度上优于朴素贝叶斯算法和K近邻算法,在1.5~2.5 m的误差范围内,累积概率明显提升。其中,误差范围在1.5 m以内的累积概率,本文算法比朴素贝叶斯算法和K近邻算法的定位精度分别提升10%和25%。说明本文算法有效提高了定位算法的精度范围,在采样网格尺寸不变的情况下,更高定位精度结果出现的概率明显提升。
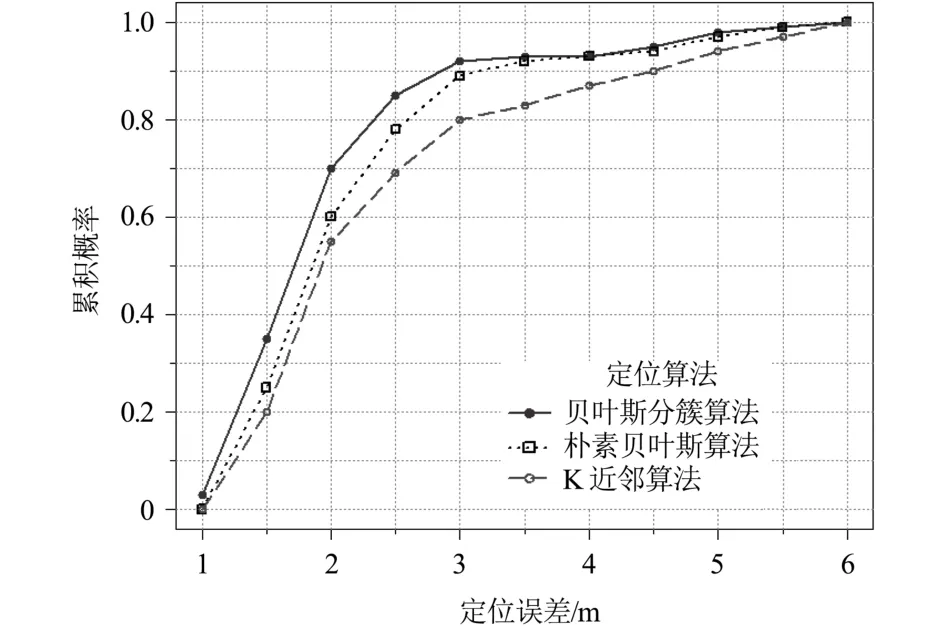
图6 定位算法比较Fig. 6 Positioning algorithm comparison
图7为AP选择算法在不同采样点处的定位结果。可以看出,本文提出的AP选择算法定位误差要低于另外2种。在不同位置上的定位稳定性也更高,定位误差范围始终在1.5~2.5 m上下浮动。

图7 AP选择算法定位误差Fig. 7 AP selection algorithm positioning error
3种AP选择算法下的累积误差分布图如图8所示。可以看出,本文的AP选择算法使整体定位精度明显提升,同InfoGain算法和Max-Mean算法相比,定位误差在1.5 m以内的概率分别增加了12%和24%;定位误差在2 m以内的概率分别增加了7%和13%。
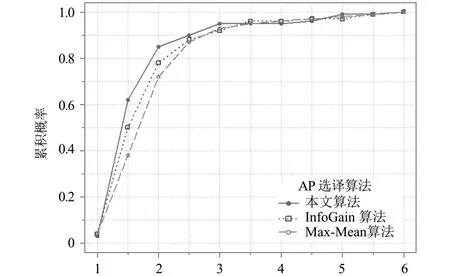
图8 误差累积概率Fig. 8 Error accumulation probability
5 结 语
在大型船舶舱体内定位的应用背景下,本文提出了基于WLAN的舱体内指纹定位算法。对在线阶段和离线阶段分别提出了贝叶斯分簇定位算法和基于信息增益的AP选择改进算法。实验结果表明,本文所提算法能够符合大型船舶舱体内多封闭空间下的定位需求。本文算法与传统室内定位算法及AP选择算法相比,定位精度明显提升。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
电脑知识与技术(2022年15期)2022-07-02
商业评论(2022年3期)2022-05-05
保健医苑(2021年9期)2021-09-08
导航定位学报(2021年4期)2021-08-29
防爆电机(2021年4期)2021-07-28
电脑爱好者(2020年23期)2020-12-30
弹道学报(2020年1期)2020-04-09
智富时代(2019年4期)2019-06-01
