可穿戴式助力外骨骼特征动作动力学研究
2018-08-28 09:12杨小平许鸿谦
机械设计与制造 2018年8期
张 斌,刘 放,杨小平,许鸿谦
1 引言
随着现代科技的不断发展,人类对于生产效率的要求不断提高。例如就工厂车间内的生产效率而言,一方面机器不能完全代替人类进行工作,另一方面人体机能的极限限制着工厂生产效率的提高,外骨骼的出现便很好地解决了这一问题[1]。外骨骼是一种可以让人体穿戴的助力辅助装置,主要目的是要增强人类的能力。例如将它配备到作战的士兵身上,可以减少士兵由于长途跋涉带来的体能消耗,还能使其携带更多的武器[2]。由此可见,外骨骼有很好的应用前景。
近年来,国内外许多专家学者都对外骨骼做了许多详尽的研究。Thetechnical trend of theexoskeleton robotsystemfor human power assistance提出基本的外骨骼概念源自于基于生物系统的人机智能系统,阐述了外骨骼系统中的关键技术应从生物力学,系统结构模型,人机交互,控制策略这几方面研究[3]。Application of EMGsignalsfor controllingexoskeleton robots设计出了两种不同的助力外骨骼,一种是具有单自由度的膝盖外骨骼,一种是基于EMG信号控制具有16个关节自由度的手部外骨骼[4]。Design of an electricallyactuated lower extremityexoskeleton设计出了一款以电为动力的BLEEX外骨骼,并与之前设计出的外骨骼样机进行对比,得出了电动外骨骼在工作效率以及额定负重载荷等方面都显示出较强的优越性[5]。Measuringthe Improvement of the Interaction Comfort of a Wearable Exoskeleton提出了基于脑电波图信号对一个9自由度系统的外骨骼机器人进行研究,提出了一种能够有效控制复杂人机交互系统的控制方法,能够提高人体的舒适度以及穿戴者的安全性[6-7]。Construction and nanomechanical propertiesof theexoskeleton of thebarnacle,Amphibalanusreticulatus通过对助力外骨骼在9名志愿者身上进行具体试验,分析得到了助力外骨骼帮助人类行走过程中能够减少能耗9%,并研究了人体在踝关节处对外骨骼的适应性[8-9]。Ergonomic contribution of ABLEexoskeleton in autom-otive industry以法国设计的ABLE外骨骼为研究对象,经过在生产车间流水线上的实验,得出了ABLE外骨骼可以减轻由于人工操作可能产生的肌肉不适,为人体减少了38.9%的能量消耗[10]。
以上的研究主要集中在对外骨骼的结构设计,控制及实验分析等方面,外骨骼为了满足能够承载重物进行工作的要求,对其动力部分驱动力与力矩的研究在整个外骨骼的设计中就显得十分必要。选取双膝蹲-起立特征动作,通过对特征动作进行运动学及动力学分析,对外骨骼各个关节处所需驱动力矩进行具体分析计算。
2 特征动作运动分析及动力学模型建立
2.1 特征动作运动分析
2.2 人体运动基本面的选择
人体的运动是通过各个关节不同的动作而复合而成的复杂空间运动,因此需要对人体的动作进行分析。为了研究人体运动学,临床医学和人机工程学通常使用参考坐标系,如图1所示。包括额状面、矢状面和水平面。双膝蹲-起立动作整个过程人体的动作基本都在矢状面内完成,在额状面内的摆动很小,我们可以把人体下肢的运动投影到矢状面内进行分析。
2.3 双膝蹲-起立人体动力学模型建立
双膝蹲-起立动作主要是由髋关节、膝关节和踝关节以及大腿、小腿和躯干的肌群共同作用完成。我们可以把髋关节、膝关节以及踝关节处的角度作为特证角。把骨骼以及躯干简化为均质杆件,各个关节简化为旋转副。双腿在运动过程中的变化趋势相同,左腿与右腿对称,我们选取右腿进行分析。以踝关节处为坐标原点,建立直角坐标系,可以得到双膝蹲-起立人体动力学模型,如图1所示。人体下蹲姿势对照图,如图1(b)所示。其中A、B、O、C分别代表膝关节、踝关节、髋关节和肩部,AB为小腿,OA为大腿,OC 为躯干。θ1、θ2、θ3为其三个特征角,θ1为躯干与竖直方向的夹角;θ2为大腿与竖直方向的夹角;θ3为小腿与水平方向的夹角。l1、l2、l3为躯干、大腿、小腿的长度。

图1 双膝蹲下肢动力学模型Fig.1 Knees Squatting Lower Extremity Kinetic Model
3 特征动作运动学分析及各关节处动力学分析
3.1 特征动作运动学分析
利用光学动作捕捉系统来对双膝蹲-起立动作进行分析。经过测试,我们共取得1586组有效数据,频率为200Hz,此次测试共耗时7.93s。我们利用多波峰(波谷)最小二乘法对测试曲线进行拟合,最后选取Boltzmann函数进行拟合,得到拟合曲线,如图2所示。
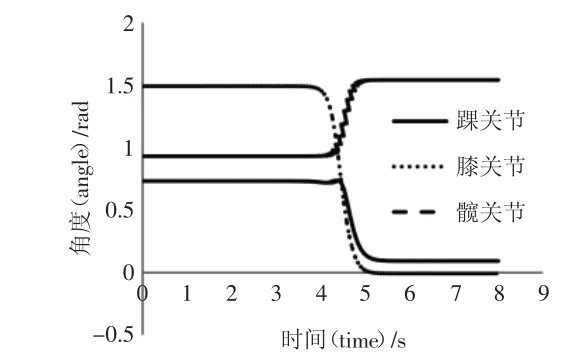
图2 双膝蹲特征角曲线拟合Fig.2 Squatting Knees Characteristic Angle Curve Fitting
3.2 动力学模型中各关节动力学分析
人体双膝蹲-起立过程中人体各个关节处运动趋势、受力状态以及角位移变化都不同,因此需要把人体分成几个部分来进行计算。根据人体运动的具体过程,我们以髋关节、膝关节以及踝关节将人体分成三部分进行分别计算。整个过程是个运动的过程,需要用到动力学中牛顿力学体系的知识来计算。根据刚体平面运动微分方程。

分别取躯干OC、大腿OA、小腿AB为研究对象,对髋关节、膝关节及踝关节处转矩进行分析计算。
3.2.1 髋关节处转矩分析
先研究髋关节处力矩变化,我们把躯干OC拿出来进行单独研究。设背架与负重的质量为m1,其质心加速度为aC1,a为质心的横坐标。躯干的受力分析图,如图3所示。
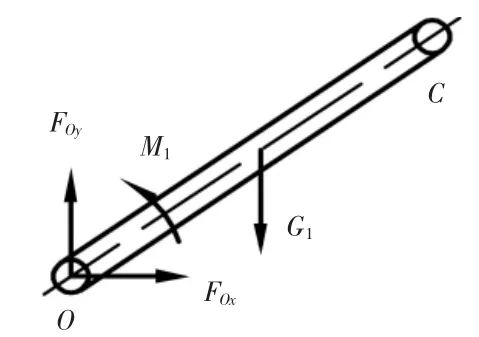
图3 躯干受力分析Fig.3 Trunk Stress Analysis
图中:FOx、FOy—大腿给髋关节处的支反力在水平方向与竖直方向的分解;G1—背架与负重所受重力,为了简化计算,我们把背架与负重的质心设在OC中点处;M1—躯干完成起立动作时所需力矩,也就是我们需要求得的未知量。
能源互联网统筹了智能电网、微电网、泛能网等概念,但智能电网是能源互联网的基础和核心,是能源转化和配置的重要平台。能源互联网的架构如图2所示。
根据刚体平面运动微分方程(1)和方程(2),可列得下列方程:

从式(3)~式(5)中可以看出 M1为 θ1、θ2、θ3的函数,而 θ1、θ2、θ3又是时间t的函数,则可以知道M1是关于时间t的函数。
3.2.2膝关节处转矩分析
再对外骨骼大腿进行受力分析,如图4所示。图中:m2—大腿的质量;aC2—其质心处加速度;b—质心横坐标。

图4大腿受力分析Fig.4 Stress Analysis of the Thigh
图4 中:F′Ox、F′Oy—躯干对髋关节的支反力在水平和竖直方向上的分量;FAx、FAy—小腿对膝关节的支反力在水平方向和竖直方向上的分量;G2—大腿所受重力;M2—支撑大腿完成起立动作所需力矩。则可列得下列方程:
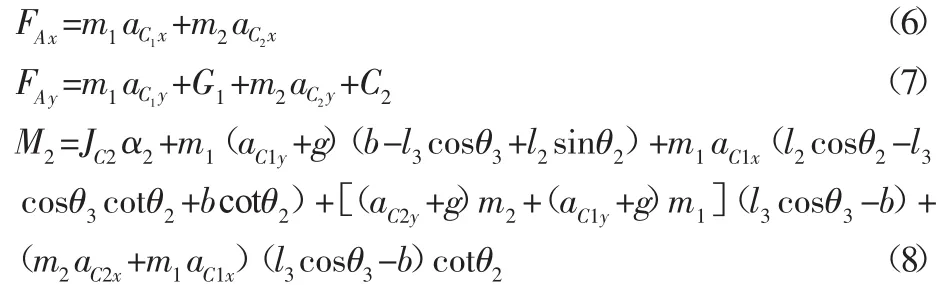
从式(6)~式(8)中可以看出 M2为 θ1、θ2、θ3的函数,而 θ1、θ2、θ3又是时间t的函数,则可以知道M2是关于时间t的函数。
3.2.3 踝关节处转矩分析
最后对外骨骼小腿进行受力分析,其中m3为小腿的质量,其质心横坐标为c,质心加速度为aC3,受力分析,如图5所示。

图5 小腿受力分析Fig.5 Calf Stress Analysis

从式(9)~式(11)中可以看出 M3为 θ1、θ2、θ3的函数,而 θ1、θ2、θ3又是时间t的函数,可以知道M3是关于时间t的函数。
4 仿真结果及分析
4.1 仿真结果
由以上的分析我们知道,转矩M为时间t的函数,由以上所有的的式子可以联立解出三个力矩随时间的函数,为了能够清晰看出力矩随时间的关系,我们在MATLAB软件中进行求解。
我们的研究对象为西南交通大学第二代外骨骼试验样机,其额定负载为60kg,为了研究双膝蹲-起立动作中各关节转矩变化以及转矩随负重不同产生的变化,我们分别采取无负重,负重20kg、40kg及60kg四种不同的工况进行仿真分析。在这四种不同的工况中,人体的运动过程不发生变化,人体运动的时间都相同。与图2中人体特征动作运动的仿真一致,时间t的取值为0s到8s,将式(3)~式(5)、式(6)~式(8)和式(9)~式(11)分别编程计算,我们得到了转矩M关于时间t的函数图像,如图6~图8所示。

图6 髋关节处转矩变化Fig.6 Torque Variation at the Hip

图7 膝关节处转矩变化Fig.7 The Knee Joint Torque Variation

图8 踝关节处转矩变化Fig.8 Ankle Torque Variation
4.2 仿真结果分析
我们将各关节四种工况下转矩峰值列,如表1所示。
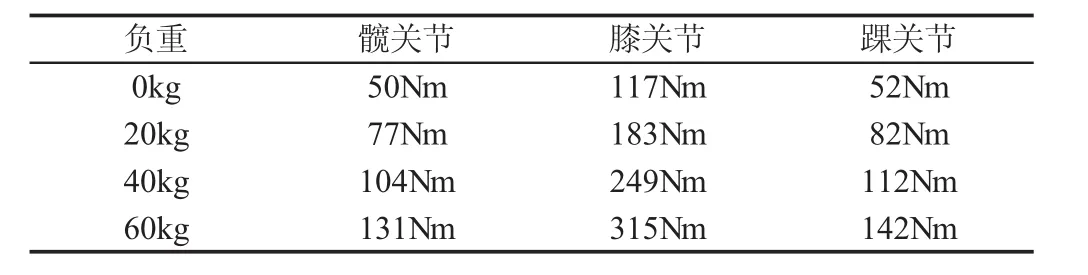
表1 各关节不同负重下转矩峰值Tab.1 Each Joint Peak Torque Under Different Load
从表1中直观的可以看出各关节随负重不同的转矩峰值。通过对比可以发现,同负重下膝关节的转矩最大,每个关节的转矩基本随负重的增加而线性变化。
5 结论
(1)选取了人体特征动作中的双膝蹲-起立动作为研究对象,采取不同负重,通过对第二代外骨骼试验样机进行研究,利用理论力学中动力学的知识,根据人体特征动作的运动特性,建立了双膝蹲-起立特征动作的动力学模型。
(2)通过运用MATLAB软件进行了编程仿真,分析得到了各个关节处转矩M随时间t的变化规律。各关节转矩峰值出现在4.3s处,且转矩随负重增加基本呈线性变化。我们可以看到膝关节处的转矩最大,在液压缸设计时需最先考虑膝关节处转矩条件。
(3)从仿真所得到的函数图像中可以看出,实验中人体从下蹲姿态到完全起立耗时大约1.5s左右,各个关节所需转矩的变化速度较快,为了达到外骨骼与人体人机高度偕行的要求,需要外骨骼动力部分在设计时,所提供的转矩变化响应要迅速,不然可能会对人体的关节处产生冲击。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
中老年保健(2021年7期)2021-08-22
小哥白尼(野生动物)(2021年12期)2021-03-29
西南交通大学学报(2018年6期)2018-12-18
大众健康(2016年3期)2016-05-31
中华骨与关节外科杂志(2016年6期)2016-05-17
中国民族医药杂志(2016年5期)2016-05-09
通信电源技术(2016年1期)2016-04-16