液压凿装机作业面积求解及结构参数影响分析
2018-08-28 09:12吴卫东王斯特王晓丹
机械设计与制造 2018年8期
吴卫东,王斯特,王晓丹
1 引言
掘进臂是液压凿装机在凿岩作业时的主要工作机构。掘进臂的凿岩作业覆盖面即其工作空间在巷道断面上的投影,是对其进行结构设计时一个非常重要的参数[1]。目前对机械臂工作空间投影面积和体积的计算方法通常采用解析法、图解法和数值法。文献[2]分别采用解析法和数值法求解某平面机器人工作面积,解析法精度更高,数值法计算效率更高。文献[3]采用图解法绘制机器人在平面上的包络曲线,然后扩展到三维空间求解其工作空间体积。文献[4]通过在Matlab中建立串联机械臂仿真模型,绘制其工作空间包络图。文献[5-6]采用基于数值法中的蒙特卡洛法对机械臂的工作空间进行了求解,通过自适应网格划分方法求取了该工作空间的体积。
工作空间的边界提取是计算工作空间面积和体积的重要步骤。文献[7-8]分别采用栅格法和距离权重法来精确提取工作空间边界点。由于蒙特卡洛法在边界处随机点分布密度较低,导致计算速度和精度存在一定的局限性。文献[9]利用分布函数取代均布函数以增大边界处随机点分布密度。文献[10]提出在边界处局部扩展随机点,重新搜寻边界点,提高了计算精度。文献[11]结合局部坐标法和角度划分法提取边界随机点,计算精度较高。提出一种基于压缩关节自由度的分段极值法生成边界作业面,利用层切法提取边界点,对其作业覆盖面积进行计算,分析掘进臂结构参数对作业面积的影响。
2 运动学分析
掘进臂可以看作5自由度的关节型机械臂,将钎头看作掘进臂的末端执行器,各部件看作连杆,采用D-H方法[12]建立的连杆坐标系,如图1所示。根据某液压凿装机的设计参数,建立掘进臂参数表,如表1所示。由表1的D-H参数利用齐次变换矩阵[12]得到钎头相对支座的位置向量为:

其中,si=sinθi,ci=cosθi,sij=sin(θi+θj),以此类推。

图1 掘进臂连杆坐标系Fig.1 Link Coordinate System of Driving Arm

表1 掘进臂D-H参数Tab.1 D-H Parameters of Driving Arm
3 工作空间求解
3.1 作业覆盖面生成
由式(1)可知,掘进臂的工作空间是由5个相互独立关节变量之间的组合[θ1,θ2,θ3,θ5,a6]来确定的。蒙特卡洛法是将工作空间构造成一个随机概率模型,随机生成大量的关节变量组合,代入位置向量方程,求解对应的坐标值,并投影到巷道断面中得到凿岩作业覆盖面,但由于能达到边界的关节变量组合较少,随机点大多数分布在凿岩作业面内部,如图2所示。因此,采用一种基于压缩自由度的分段极值法来生成凿岩边界作业面,具体步骤如下:(1)压缩自由度:掘进臂关节变量参数中,a6相对于参考坐标系为x轴平移变量,θ2和θ3为y轴旋转变量,θ1和θ5为z轴旋转变量,由于凿岩作业面内部无作业死区,为使随机点尽可能分布在外围边界处,令a6取最大值。故将5自由度压缩为2自由度[θ1+θ5,θ2+θ3],由于掘进臂的左右摆角对称,分别取θ1和θ5的摆角范围(0~30)°为和(0~25)°;(2)分段极值:令钎头仰角最大,垂直于巷道顶部,使和在转角范围内随机取值,代入位置向量方程求解,并将对应的坐标值投影到凿岩断面上,如图2中的A区域所示。同理,分别令钎头摆角和钎头俯角最大,得到B和C区域的点云图。各区域对应的关节转角参数,如表2所示。
将蒙特卡洛法和改进算法生成的点云图进行对比,改进算法生成的随机点在边界处密度高于作业面内部,相比于蒙特卡洛法具有明显的优势,仅需生成5 000个随机点,就高于常规算法50 000个随机点的边界密度,且计算效率也有较大提升。
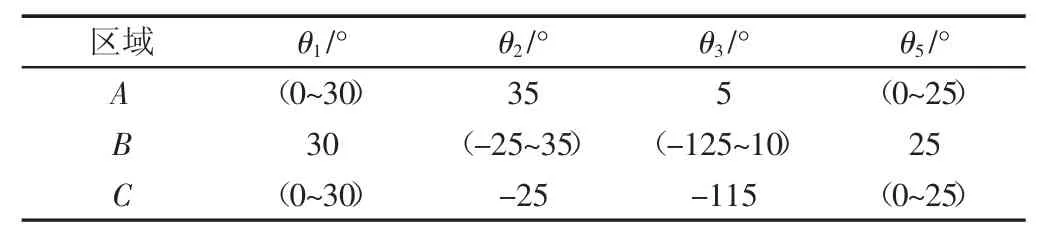
表2 凿岩边界关节转角Tab.2 Joint Angle of Drilling Boundary

图2 边界点密度分布对比Fig.2 Comparison of Boundary Point Density Distribution
3.2 作业面积求解
将其按z方向划分为m行,提取凿岩作业面上的边界随机点,如图3所示。每行的宽度为b=(zmax-zmin)/m,在每一行中搜寻右边界线y方向的最大值yimax和最小值yimin。当凿岩作业覆盖面的行数m足够大时,可将每行的曲边梯形面积近似按直角梯形面积进行计算,则凿岩作业覆盖面的总面积为:

根据上式(2),当 m=50,100,200 行时,凿岩作业覆盖面分别为 29.452m2,28.998m2,28.843m2,而理论作业面积为 28.748m2,由此可知,当作业面划分为50行时,每行宽度较大,从而产生一定的误差;当作业面划分为200行时,面积的计算值与实际值已经十分接近,误差仅为0.33%。考虑到求解效率和计算精度,划分为100行已能满足工程机械的要求。

图3 作业面积层切图Fig.3 Drilling Area Floor Cut Map
4 结构参数对作业面积的影响
采用分段极值法和层切法,分别计算各构件在不同长度或关节变量时对应的作业面积,利用Matlab得到各结构参数与作业面积的拟合关系曲线或响应面。
4.1 构件长度的影响研究
各构件长度对作业面积的拟合曲线,如图4所示。作业面积与万向节、动臂、关节两端铰点距离a2、a3、a4和铲臂铰点至钎头水平距离a6近似为线性关系,其中,a6的增长率最大,而掘进臂支座到凿装机前支点的距离a1对作业面积无实际影响。
4.2 各关节变量的影响研究
万向节摆角θ1和铲臂摆角θ5的转角范围与作业面积的响应面,如图 5(a)所示。当 θ1和 θ5上限在(0~45)°时,其与作业面积近似为线性增大的关系,对比作业面积随θ1和θ5的增长速率可发现,θ1对作业面积的影响较大;动臂俯仰角θ2和关节俯仰角θ3的转角范围与作业面积的响应面,如图5(b)、图5(c)所示。作业面积随θ2和θ3的转角范围呈非线性增长的关系,当-45°≤θ2≤45°、-95°≤θ3≤-5°时,作业面积增大速率相对较大,随着转角范围的进一步扩大,增大速率趋于平缓。对比可知,θ2对作业面积的影响较大。
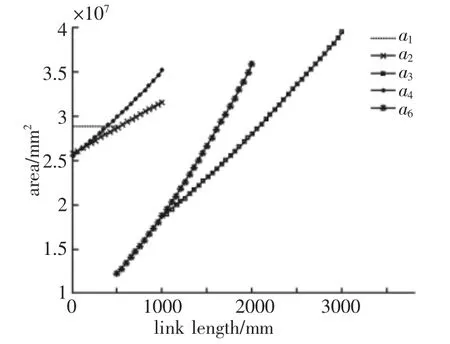
图4 构件长度对作业面积的影响Fig.4 Effect of Link Length on Drilling Area

图5 关节转角范围对作业面积的影响Fig.5 Effect of Joint Angle Range on Drilling Area
5 结论
(1)采用D-H法建立了其掘进臂的运动学数学模型,获得了凿岩机构钎头的空间位置矢量。提出一种基于压缩关节自由度的分段极值法,将同向关节变量压缩,生成凿岩边界作业面。运用层切法提取边界处随机点,求解得到液压凿装机的作业面积为28.843m2,误差仅为0.33%。
(2)在上述方法基础上,对掘进臂的结构参数对作业面积的影响进行了分析,其中,铲臂铰点至钎头水平距离a6和万向节摆角θ1以及动臂俯仰角θ2对作业面积的影响较大,在设计范围内,作业面积随a6和θ1呈线性增大的关系,随θ2呈非线性增大的关系,当 -45°≤θ2≤45°时,作业面积增大速率较大,但 θ2转角范围进一步扩大时,增大速率逐渐放缓。在掘进臂设计和优化时,可适当增大铲臂长度、冲击部伸缩长度、万向节摆角和动臂俯仰角,以提高其作业范围。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
模具制造(2019年10期)2020-01-06
新商务周刊(2019年1期)2019-12-20
学习与科普(2019年30期)2019-09-10
解放军健康(2017年5期)2017-08-01
探测与控制学报(2015年4期)2015-12-15
凿岩机械气动工具(2014年4期)2014-03-01
凿岩机械气动工具(2014年4期)2014-03-01
凿岩机械气动工具(2014年3期)2014-03-01
凿岩机械气动工具(2014年2期)2014-03-01