飞行训练空域优化平台的搭建
2018-08-28 09:29郑清伟林恩民钟其贤
天津科技 2018年8期
郑清伟,林恩民,钟其贤
(中国民航大学 天津300300)
0 引 言
随着中国低空空域政策的放开,低空空域训练的安全性受到更多重视。本文旨在利用低成本、便捷的航模验证方式验证飞行训练科目中空域优化的可行性,寻找低空空域优化的不足并作出总结与改进。模拟验证由多架固定翼航空模型为主体,以地面教员与观察者为主要视角,增强飞行员安全空域间隔意识与空间感、姿态感,便于飞行员从管制角度考虑飞行间隔,增强飞行员与管制员的思维相似度。操作航模过程中,当操作者距离较远时,地面的观察效果下降导致大机动性动作存在操作过量,本次模拟飞行对保障飞行间隔以及建立飞行员塔台视角思维具有一定的指导意义。本项目用固定翼航模进行编队验证,既降低实验成本,也提高了安全系数,开辟了一条低空空域优化的新途径。
1 制作过程
航模的制作过程主要分为机体结构的组装、动力系统的安装、电子设备的安装和调试3个步骤。
1.1 机体结构的组装
在制作中使用了进口uhu水性胶水和2118塑料快接胶,具有快干定型和超轻特性。全机主体结构由高端EPO材料制成,具有耐摔易修的特性,有助于降低训练和维护成本。首先安装机体外壳承力隔框和分层隔板。全机机身分 3层,隔离了飞控、电池和图像设备,减少了电磁干扰,提升了飞机安全性能。在安装尾部碳杆时,选用了 3,k薄壁的碳纤维卷管,高T尾设计,规避了平尾升降舵操纵效率低下的问题。
1.2 电子设备的安装
本项目飞机采用2,820,kV 880的无刷电机,配合13×6.5的马刀式螺旋桨,推力达到2.67,kg。
一般而言,大桨配低 kV值电机,小桨配高 kV值电机,电机与桨不能随意搭配,否则容易烧电机,甚至烧电调。1365桨是经过选择的,相对续航较12寸桨有所提高。而飞机的电调最重要的参数是 A数,即电调可以承受的最大电流。选用多大的A数的电调和电池有密切联系。比如配合2,200,MA 20 C的电池,最大负载电流为 30,A的电机,最大输出为45,A的电调,这是一个比较合理的配置。本项目使用的是 60,A电调,持续工作电流可达 60,A,允许短时间 60~70,A的过载运行。而航模电池的选择也有讲究:①容量,锂电池上标的电容量是 4.2,V放电至2.75,V所获得的电量;②电池的放电倍率,即 C数,是指电池能正常放电的倍数,在电池容量相同的前提下,C数高,输出越强劲;③电池中串联电芯的数量,平时使用电池,单片电芯电压最低不得低于 3.7,V,最高不得高于 4.2,V,电池各个电芯的电压差越小,电池的质量越好。
1.3 电子设备的安装和调试
本项目采用了 px4固件的开源飞控作为机载飞控,具有可拓展、可编程、二次开发的特性。搭配了TM832 5.8,GHz模拟图传和 Sony高清700,tvl摄像头,可以达到零延迟的第一人称飞行体验,对飞行员的反应和意识都有较大锻炼。在调试过程中需要注意频点和频道的选择,避免对其他设备造成干扰。数传(天地信号传输)使用了 915,MHz的 100,mW 数传。间隔信号传输可以在天空中向飞行器发布指令,拥有初步的失控返航和航点画设能力,可以在飞机失控时救机。
在飞控调试和调参过程中遇到了很多问题,如飞控校准传感器异常、飞控GPS无法获取数据、摄像头烧毁等。项目组成员对这些问题进行了一一修复。通过对传感器的重新归零、更换GPS硬件等,成功进行了测试。采取了“飞行中第一视角监控+任务后飞行日志分析”替代了原先方案的地面站实时日志分析,提升了平台安全性,降低了器材成本。
通过对日志中不同参数的查找,可以很方便地读取GPS坐标信息、速度、高度和各舵面响应的控制信息,便于任务后分析飞行员操作情况,提出改正意见。
图1为真实场景下,模型飞机模拟航校飞行训练时的航迹图,能够实时观测到飞机的飞行状态和飞行数据。

图1 航模模拟飞行航迹Fig.1 Model flight simulation flight path
2 模拟飞行训练数据分析
8,600,m以下,每隔 300,m规定为一个飞行高度层。在飞行训练中,在气象条件达标的情况下,实行目视飞行规则。一般的,起落航线的飞行高度为300~500,m,飞行训练机多为A类航空器,在训练空域飞行时,与前机的垂直间隔应保持在 300,m以上,水平间隔应保持在 1.5,km以上,同时遵守航空器的尾流间隔规定。飞机达到起飞速度后拉杆,在爬升的过程中,保持目视前方及天地线,并保持爬升姿态,在一、二转弯时,为防止飞机低头可稍微向后带杆,继续飞行至 3,000,ft时保持巡航高度不变,直到进入返场边。返场进近时,打开襟翼,参考下滑指点信标不断修正飞机的高度及位置完成降落。在利用航模的模拟验证中,由于经费不足,不能实现双机联飞以更好地判断飞机的间隔、评定飞行质量。图2、3、4分别是航模飞行时的正常视角、俯视角和侧视角航迹(单位是m的飞机轨迹图,定义飞机起点为原点)。固定翼航模进行模拟飞行训练时,与实际飞行训练中的情况仍具较大差别,固定翼航模飞行速度低、俯仰姿态较大。进行固定翼航模飞行,主要是给操纵者提供一个类似于塔台的视角,飞机在低空空域进行飞行训练时,为了保障飞机的安全,会给飞机设定一个飞行的超障余度,一般在机场为中心半径 55,km的范围内。超障余度 MOC为平原地区不得小于 300,m,丘陵和山区不得小于 600,m。因此,在实际飞行训练中,飞行员应把握好飞行空域中最高障碍物的高度,保持最低超障余度,以避免在飞行训练中发生碰撞。现如今,航空器的事故类型可归为:空中失控、偏出跑道、跑道外着陆等,将近一半的进近着陆事故都属于可控飞行撞地(CFIT),而引发CFIT大多是飞行员缺少垂直方向的意识。因此,为了保证飞行安全,飞行员对航路上的障碍物高度一定要把握清楚,飞行过程中时刻保持安全的超障余度。
图2 正常视角Fig.2 Normal angle of view
图3 侧视角Fig.3 Side view
图4 俯仰视角Fig.4 Pitch angle
3 飞行姿态的分析
如图5~7所示,从实验所得数据分析可知,随着飞机的爬升迎角增大,飞行性能先增加后减小,增大到一定程度飞行性能开始下降(图5中标红即性能开始下降点),甚至失速,在实际飞行训练中应尽量避免。

图5 飞行轨迹侧视图Fig.5 Flight track side view

图6 飞行轨迹俯视图Fig.6 Flight track overview
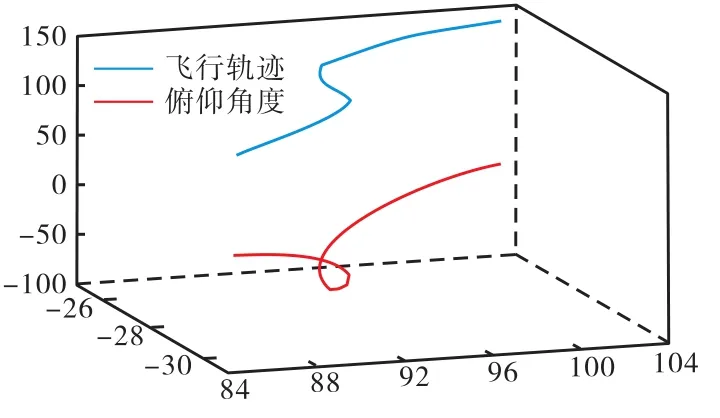
图7 飞机俯冲状态截取片段Fig.7 Aircraft dive,intercept footage
4 结 论
在飞机组装完成之后,项目组进行了多次手动或半自动试飞。对飞机的环境适应能力、飞控的鲁棒性都做了测试,在测试中飞机工作稳定。通过此次飞行空域优化的验证,可以有效提高空域的利用率,在有限的空域内,尽可能保证安全的情况下,加快飞行训练的进程和效率,加快飞行员的培养速度,为我国民航发展培养出更多的优秀飞行员。
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
民用飞机设计与研究(2019年2期)2019-08-05
中国公共安全(2017年7期)2017-10-13
儿童故事画报·自然探秘(2017年3期)2017-06-29
海峡科技与产业(2016年3期)2016-05-17
中国农业文摘-农业工程(2016年5期)2016-04-12
舰船电子工程(2015年8期)2015-03-14
语文世界(小学版)(2014年3期)2014-08-02
小学生导刊(中年级)(2007年5期)2007-07-03