
舰机协同防空中的冲突检测*
2015-03-14 10:55刘玉亮安景新张建强
舰船电子工程 2015年8期
刘玉亮 安景新 刘 忠 张建强
(1.中国船舶重工集团公司第七〇九研究所 武汉 430205)(2.海军驻天津八三五七所军事代表室 天津 300308)(3.海军工程大学电子工程学院 武汉 430033)
舰机协同防空中的冲突检测*
刘玉亮1安景新2刘 忠3张建强3
(1.中国船舶重工集团公司第七〇九研究所 武汉 430205)(2.海军驻天津八三五七所军事代表室 天津 300308)(3.海军工程大学电子工程学院 武汉 430033)
在当今防空作战情况下中,舰机协同作战成为了当前防空作战的主要方式,但是舰机协同作战中作战空域会出现各类冲突。为保障作战单位的安全,有效对冲突进行探测,获得冲突信息,论文利用网格法对舰机协同作战中的空域进行分割,形成空域单元,研究了各类作战平台对空域的使用情况,提出了基于网格法的冲突探测方法。
舰机协同; 网格法; 空域单元; 冲突检测
Class Number E837
1 引言
在现代高科技海洋战争中,舰艇与航空兵的联合作战是未来的发展趋势。组织好两种兵力相互之间的协同,可以构建起有效的防空体系[1~3]。但是由于舰艇在对空作战中使用导弹与舰炮进行防空与反导任务,武器系统在使用的过程中会与己方的航空兵产生空域上冲突,此时则需要对舰机协同作战任务中的空域进行规划,有效地对冲突进行检测。
2 作战空域模型
空域资源指作战行动开展和实施所处的空间。在协同防空作战中执行平台机动或武器射击等战术行动时,必须考虑各作战单位之间的空间位置关系,避免两者在空间使用上产生冲突,以防止误撞、误伤或误击事故的发生[4~6]。因此需要合理地对空域进行划分和规划,对冲突进行消解。
2.1 网格法划分空域
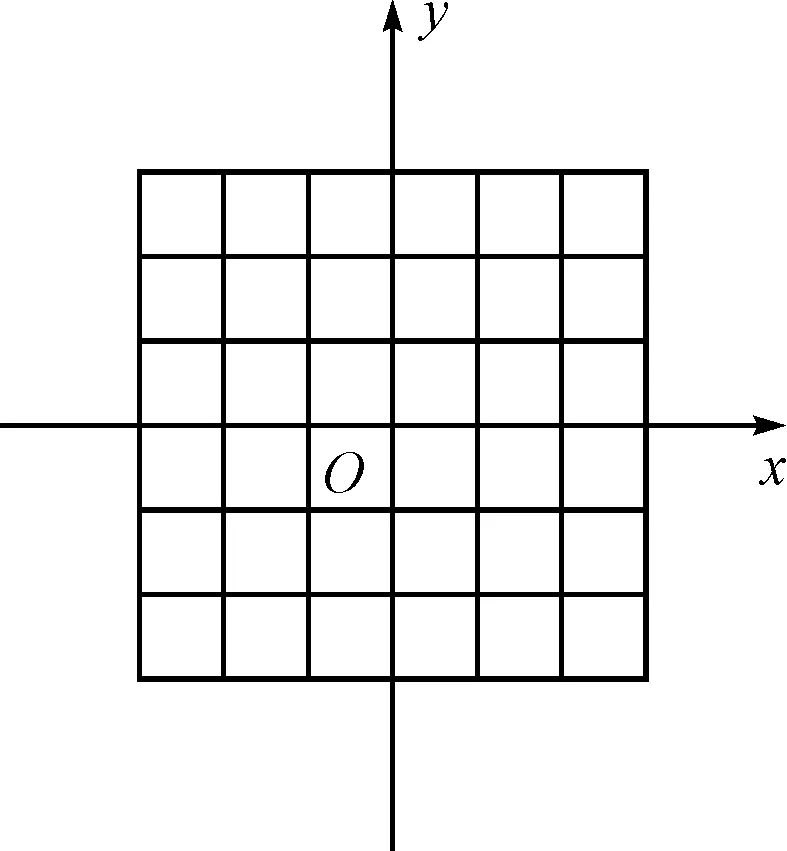
图1 空域单元划分模型
选取空域中水面舰艇所在点O作为坐标系原点,建立平面直角坐标系O-XY,OX指向正东,OY指向正北,将整个空域划分为边长为d的正方形,将该方格作为空域单元,如图1所示。
由图1可见,每一个空域单元的中心可以由公式获得该空域单元的中心,为各空域单元左下坐标点,(m,n)为空域单元左下坐标点,为计算空域是否占用中提供了便利[7~8]。
2.2 作战单元空域
在舰机协同防空作战中,作战单元包括水面舰艇、航空兵以及导弹,以上作战单元都包含在作战空域,本文中根据各作战单元的作战效能对该单元的空域进行了规划[9]。
1) 水面舰艇空域
对于水面舰艇,主要由武器系统占据空域,水面舰艇上不同的武器系统作用距离和任务不同,射界不同,导致水面舰艇占据的空域由多个环形组成,其中单个环形占据如图2所示。
2) 空中单位空域
对于空中单位所占空域,主要由导弹与航空兵组成,其中分为航空兵航路以及导弹航路,如图3所示。
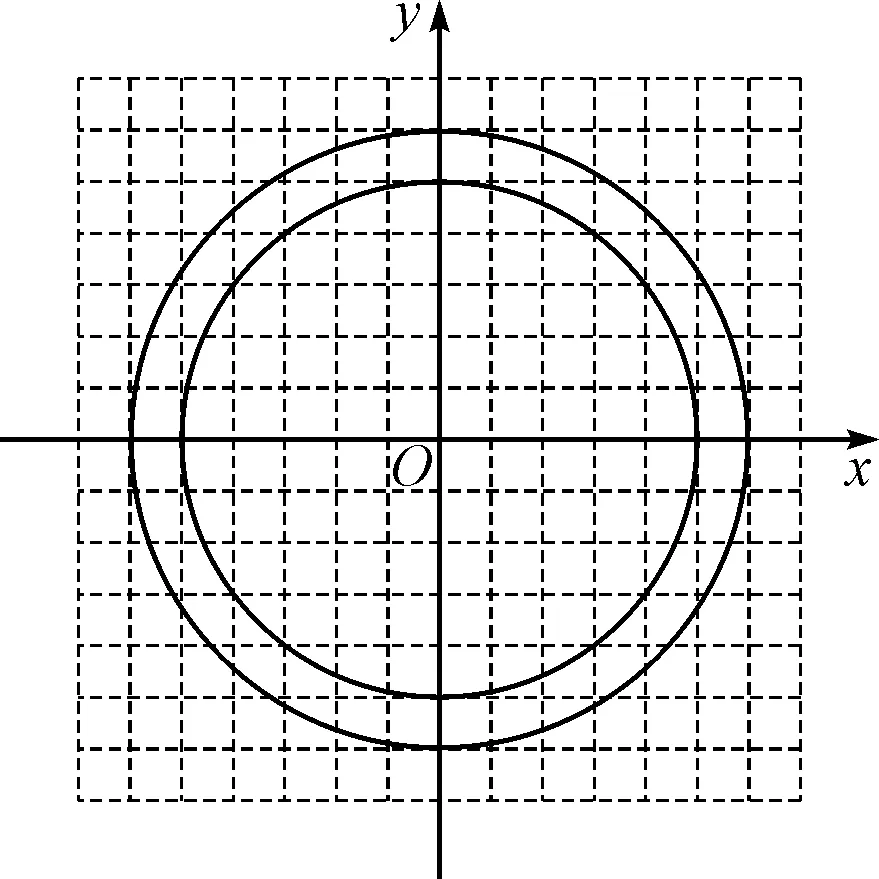
图2 舰艇武器系统空域
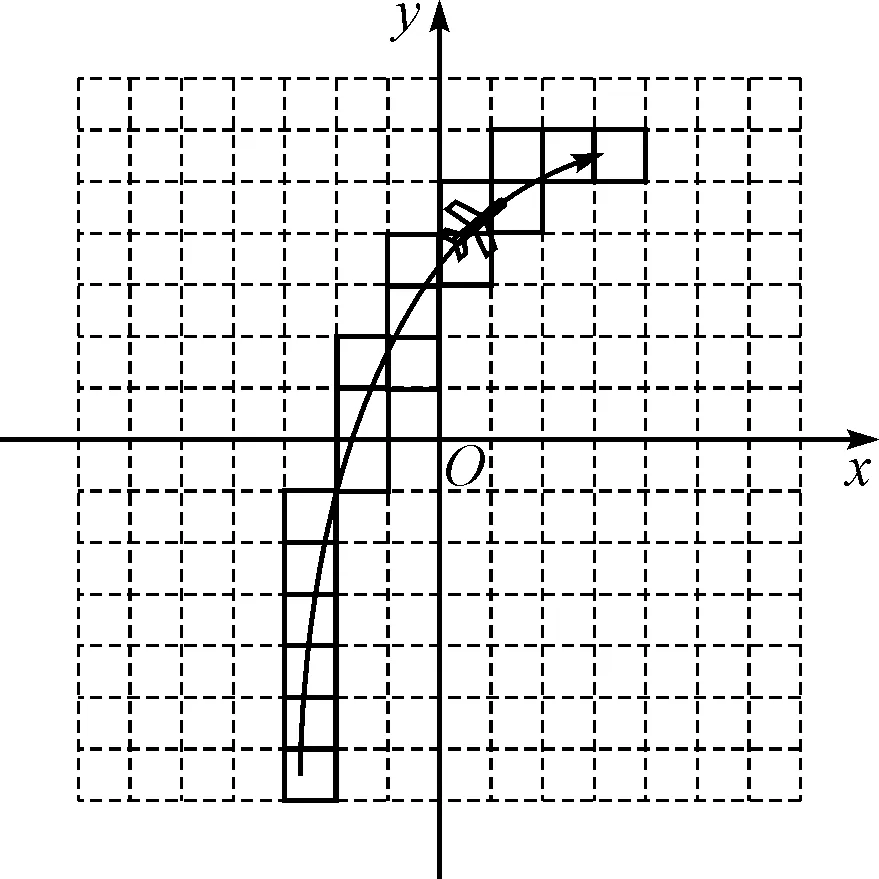
图3 航路空域模型
由图4可以看出,由于导弹等空中单位的航路通常为曲线,因此在实际计算中,首先将各空域单元中的曲线转化为直线,对于等效后的曲线可以视为由多条直线段构成,但是由于部分直线段与相邻的直线段夹角约为π/2,因此可以对部分直线段进行合并,简化空域单元调用时间的计算复杂程度[10]。

3 空域调用判据
由前文可知,对于空域资源占用判据可以转化为对空域单元格的调用判定。因此,在这里定义,将作战单元视为质点,当该单元完全进入某一空域单元格中时,认为该空域单元被调用;若该作战单元处于空域单元格之间时,认为处于上一个空域单元中。
一般情况下,可以通过对航路上每一个点是否处于空域单元格内对是否调用进行判断。但是实际上,可以利用直线距离空域单元格中心的距离来判断。
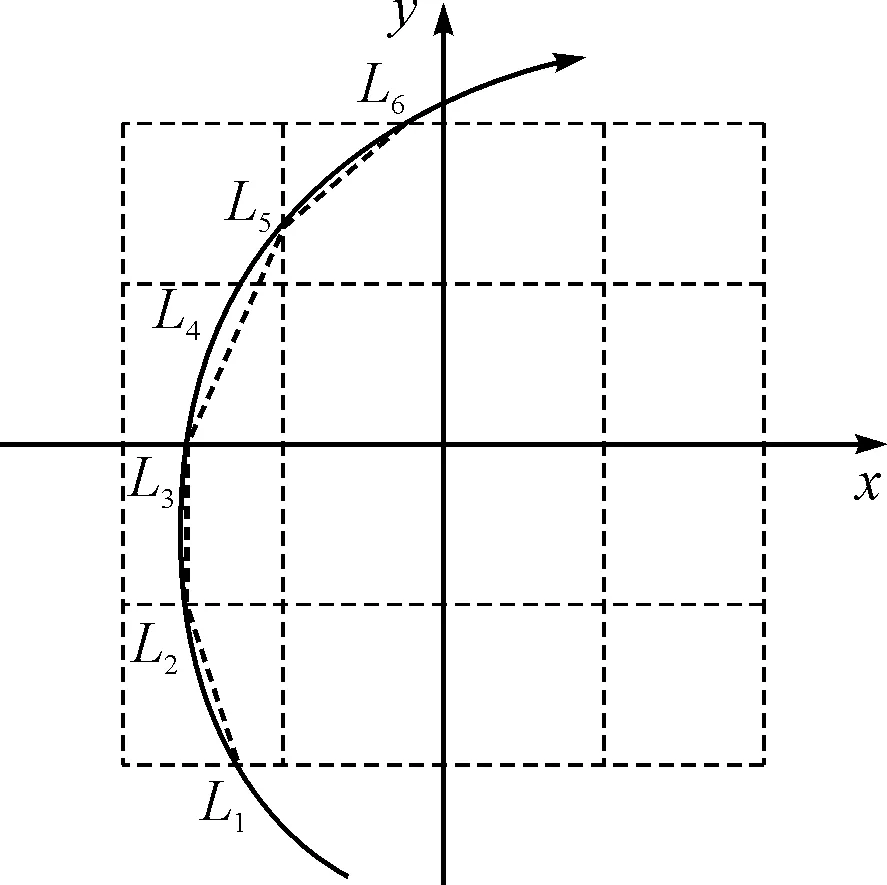
图4 航迹曲线等效图
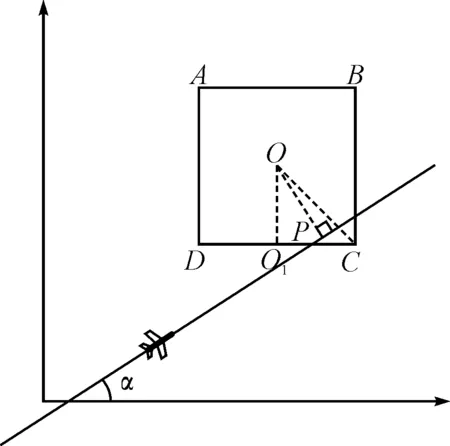
图5 空域占用判据
由图可得,当空域单元中心O距离航路直线距离小于中心到顶点的距离时,则认为该航路经过该空域单元,即:
即:
此时该空域单元会被航路占用。同时,对于空域调用的时间,以作战单位进入该空域单元边界的时刻作为起始时间,以离开该空域单元边界的时刻作为结束时间。当作战单位以速度v沿航路在空域单元中经过时,占用时间为
其中,lmn为航路在该空域单元中的长度。
同理,该方法可以对武器系统空域的边界进行判定,对于所有边界经过的区域认为该空域单元被调用,内部包含的空域单元为武器系统调用的空域单元。调用时间为武器系统从启动到打击结束的时间。
4 空域冲突检测
在按照网格法对空域中的冲突进行探测时,将空域分为多种类型。第一类为航路空域,即导弹航路及航空兵航路,该类型空域始终位于整体空域中,直至使用该空域的单位被摧毁或离开整体空域;第二类为水面舰艇武器系统空域,该类型空域在武器系统未被激活时并未在界面上显示,只有当武器系统被赋予作战任务时调用空域,则该武器系统空域调用空域单元格。
想要取得较为理想的效果,基本要求是:能够对于冲突及时发现,能够有效分辨冲突类型,冲突时序图如图6所示。

图6 冲突时序图
由图4可得,在进行冲突检测时,要根据以下两个基本原则:
1) 在相同时序内占用相同类型的空域单元时,发生冲突。
2) 在相同时序内占用不同类型的空域单元时,需进行判定冲突是否发生。
其中,当在相同时序内占用不同类型的空域单元时,进行冲突判定,若此时武器系统空域还未进入激活状态,则未发生冲突;若武器系统空域已经进入激活状态,则发生冲突。
对于某一空域单元,同时拥有多个状态,可以作为一个矩阵,即:
因此整个空域可以视为由多个状态矩阵组成的矩阵,即:
一旦各作战单位在某一个或几个空域单元发生冲突,可以迅速通过从矩阵中找到冲突的位置。在矩阵Amn中,可以将所有状态取值为0和1,当该矩阵为空矩阵,即当该矩阵中所有数值均为0时,该空域未被调用;当有某一作战单元或武器系统调用该空域时,将其在矩阵Amn中状态变为1,此时表示该空域单元被调用;当空域中包含两个及以上的非零数据时,则认为该空域单元中发生冲突。
5 实例分析
假设以水面舰艇所在位置为直角坐标系原点,对空域进行划分,空域单元大小为1000m,飞行器A1坐标为(-2,1),飞行器A2坐标为(3,-2.5),飞行器A3坐标为(2,1)。飞行器的飞行计划已经规划完毕,飞行速度为200m/s。当前时刻T=0,水面舰艇在时刻T=2沿方向左舷45°发射一枚导弹,速度为600m/s,整体态势如图7所示,整体冲突检测效果如图8所示。

图7 空域态势图
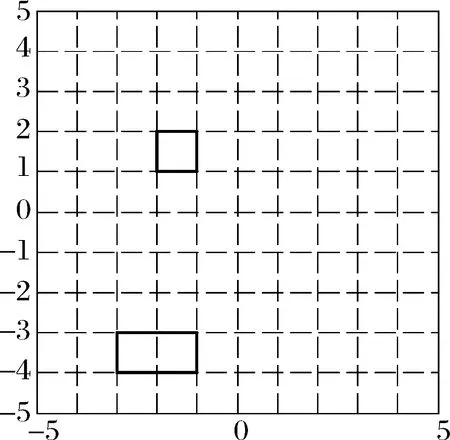
图8 冲突检测效果图
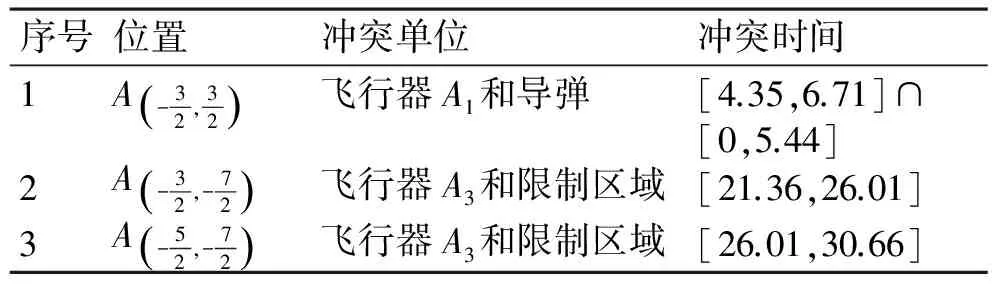
序号位置冲突单位冲突时间1A-32,32()飞行器A1和导弹[4.35,6.71]∩[0,5.44]2A-32,-72()飞行器A3和限制区域[21.36,26.01]3A-52,-72()飞行器A3和限制区域[26.01,30.66]
由上述图标可以得出,该方法可以有效对空域中产生的各类冲突进行检测,并给出相应的冲突类型及冲突信息。
6 结语
本文主要通过利用基于网格法分割空域的方法对空域中可能出现的冲突进行检测,经过仿真结果发现可以有效探测出空域中的各类冲突。但是由于对空作战任务中情况负责多变,不能单纯地在二维平面中进行分析,因此需要对下一步工作进行拓展,在三维直角坐标系中进行分析,进一步提高冲突检测方法的实用性和有效性。
[1] 徐圣亮,姜青山,张培珍,等.舰机协同防空作战理论的研究与进展[J].舰船科学技术,2010,32(7):135-139.
[2] O’NEIL W D. The cooperative engagement capability(CEC) transforming naval anti-air warfare[D]. Center for Technology and National Security Policy,2007.
[3] 张最良.军事运筹学[M].北京:军事科学出版社,1993.
[4] 吴红星,叶志林,沈培华,等.舰机协同防控体系构建及效能[J].四川兵工学报,2008,29(6):96-97.
[5] HWANG J. S Analysis of effectiveness of CEC(Cooperative Engagement Capability) Using Schutzer’s C2 Theory[D]. Naval Postgraduate School,2003,12.
[6] HOPK INS J. The cooperative engagement capability[J]. APL Technical Digest,1995.
[7] 余亮,邢昌风,石章松.协同防空作战中的空域资源建模研究[J].海军工程大学学报,2014(1).
[8] Reich P G. Analysis of Long-range air traffic system, Separation standards[J]. Journal of Institute of Navigation,1966,19(1):1-12.
[9] Hu J H, Lygeros J, Prandidi M, et al. Aircraft conflict prediction and resolution using Brownian motion[C]//Phoenix A Z. Proc IEEE Conf Decision Control,1999,12(1):2438-2443.
[10] Parimal Kopardekar, Karl Bilmoria, Banavar Sridhar. Initial Concepts for Dynamic Airspace Configuration[C]//7thAIAA Aviation Technology, Integration and Operations Conference(ATIO),2007:18-20.
Conflict Detection of Warship-aircraft Cooperatively Anti-aircraft
LIU Yuliang1AN Jingxin2LIU Zhong3ZHANG Jianqiang3
(1. 709thResearch Insititure, China Shipbuilding Industry Corporation, Wuhan 430205) (2. Representative Office of Navy in 8357 Reseaich Institute, Tianjin 300308) (3. College of Electronic Engineering, Naval University of Engineering, Wuhan 430033)
In the situation of air combat, the warship-aircraft cooperatively anti-aircraft become the main form of air defense, but there are many conflicts in airspace. In order to guarantee the safety of the unit, the conflicts are detected effectually and the information of conflicts is obtained. In this paper, the airspace of warship-aircraft cooperatively anti-aircraft is comminuted by using the grid method and the airspace cells are obtained. The use of various kinds of platforms of airspace is studied, and a detection method of conflict based on grid method is proposed.
warship-aircraft cooperatively anti-aircraft, grid method, airspace cell, conflict detection
2015年2月3日,
2015年3月27日
刘玉亮,男,硕士,研究方向:作战指挥控制。安景新,男,硕士,研究方向:系统工程。刘忠,男,教授,研究方向:作战指挥控制。
E837
10.3969/j.issn1672-9730.2015.08.010
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
环球时报(2021-02-01)2021-02-01
科技视界(2020年8期)2020-05-18
火力与指挥控制(2020年2期)2020-04-02
弹道学报(2019年4期)2020-01-10
商品与质量(2019年34期)2019-11-29
计算机系统应用(2019年3期)2019-03-11
弹道学报(2018年4期)2019-01-05
北京航空航天大学学报(2016年7期)2016-11-16
海峡科技与产业(2016年3期)2016-05-17
