
基于干扰观测的制导控制一体化反演滑模研究*
2018-08-22 02:52王志凯马建伟宋晓娜
火力与指挥控制 2018年7期
王志凯,马建伟,宋晓娜
(河南科技大学信息工程学院,河南 洛阳 471023)
0 引言
传统的制导与控制系统的设计,是基于频谱分离的思想,把系统分为快回路(控制回路)与慢回路(制导回路)。首先设计制导回路,获得期望过载;然后设计自动驾驶仪控制回路,对期望的过载进行跟踪,最后把控制回路嵌入到制导回路中进行联调。末制导阶段时,随着导弹与目标距离的接近,制导回路频率变快,两回路间的耦合变大,分开设计两回路时控制难度大,易导致较大的脱靶量。IGC方法[1-3]的思想是不区分制导回路与控制回路,将其作为一个整体考虑,充分考虑制导与控制回路的耦合关系,根据通过弹-目相对运动关系,利用视线角与导弹姿态信息直接产生舵偏角指令。这样既能保证避免出现导弹失稳现象,又能提高制导精度。
自20世纪80年代威廉姆斯等人提出导弹制导控制一体化概念以来,国内外很多学者对此做了大量的研究。Idan M等人[4-5]将零脱靶量作为滑模面,采用滑模方法设计了IGC控制器。董朝阳等[6]采用扩张状态观测器对系统不确定性和干扰进行估计和补偿。采用反步终端滑模实现姿态控制。孙向宇等[7]在模型中引入不确定性,采用连续非光滑控制对三维块系统设计观测器进行补偿,结合块动态逆法与反步法设计控制器。M Sharma等[8]人使用神经网络、自适应等方法,对模型的误差及不确定性进行在线估计,并利用反步法设计了IGC控制器。虽然对一体化控制技术已经有了很多的研究方法,但仍存在许多问题亟待解决。
本文针对俯仰通道IGC模型,将模型的不确定性及参数摄动等因素视为干扰,通过NDO对其进行估计,通过补偿来削弱不确定扰动带来的影响。结合反演滑模与动态面法设计IGC控制器,为了削弱滑模控制带来的抖振,采用了自适应趋近律方法。通过Lyapunov理论证明了系统的稳定性。仿真结果表明,所设计的一体化控制器可以取得较小的脱靶量,系统对干扰及不确定性具有较强的鲁棒性。
1 制导控制一体化建模
1.1 弹-目相对运动关系

图1 纵向平面弹-目相对运动关系
图1中M和T分别为导弹与目标的位置,Vm和Vt分别为导弹与目标的速度,θm和θt分别为导弹与目标的弹道倾角,am和at分别为导弹与目标的切向加速度,q为弹目视线角,R为弹-目之间的相对距离。定义角q与角θ在基准线之上的角度为正,反之为负。
由图1所示的弹-目运动关系,根据牛顿力学定理,可得出导弹在纵向平面内的相对运动关系方程为:

式中,Vq为视线角速率即垂直于视线方向的弹目相对速度。
对式(2)求导并将式(1)带入可得

对式(3)求导,并将式(4)带入可得

式(5)中的Δq未知有界不确定项,假设导弹的运动过程,导弹的运动速度不发生变化,只改变速度的方向。
1.2 导弹制导控制一体化动力学建模
为了便于对问题的分析,对导弹的运动学建模作出以下假设:
假设1:由于一体化控制主要用于末制导阶段,认为导弹发动机推力为零,导弹速度不变。
假设4:把其他通道对纵向通道的耦合作用,认为是未知有界不确定扰动。
基于上述假设,本文采用如下动力学模型[9]。

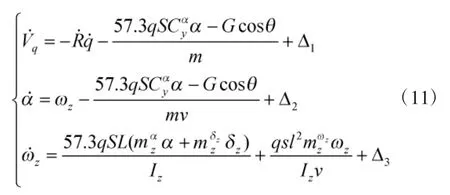
式(6)~ 式(9)中,α 为导弹的攻角;ωz为俯仰角速率;m为导弹质量,v为导弹速度;q为动压;S为导弹特征面积;L为导弹气动弦长;Iz为导弹对z轴的转动惯量;δz为导弹舵偏角;ϑ为俯仰角;θ为弹道倾角为导弹攻角α对应的升力系数;和分别为ωz、α和δz对应的俯仰力矩系数。
根据导弹动力学关系,由式(6)、式(8)、式(9)可得导弹的加速度为:

根据以上分析,综合式(10)可得导弹制导控制一体化模型如下:
制导控制一体化模型可以写成如下形式:

系统的状态变量及输入变量如下:

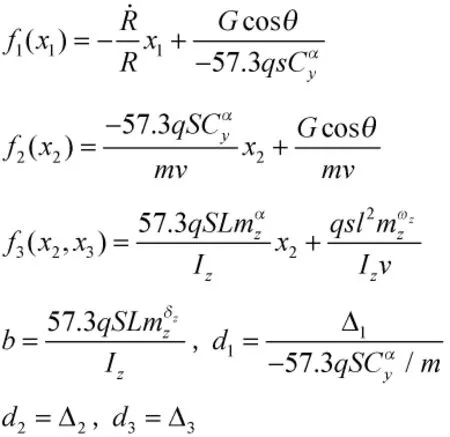
式中:
2 非线性干扰观测器(NDO)设计
为了消除未建模误差,参数摄动等不确定性系统的影响,本文将其视为未知扰动,采用非线性扰动观测器来估计未知干扰。以式(12)的第1式为例,说明干扰观测器的设计原理。
系统方程为:

本文设计如下形式的干扰观测器[10]


现定义观测器误差:

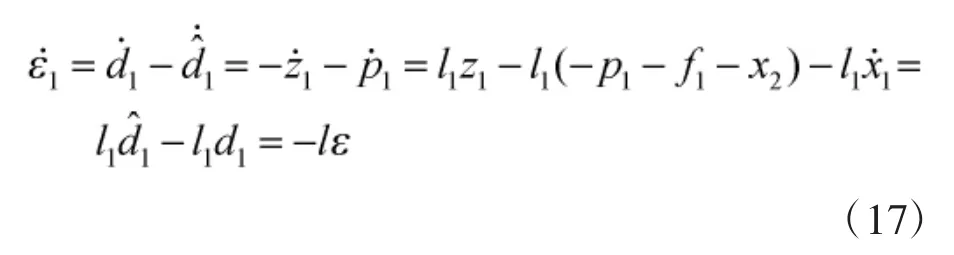
一般情况下关于干扰d的微分先验知识是未知的,假设干扰d的变化,相对于观测器的动态特性的变化是缓慢的,即认为=0。现考虑式(14)、式(16),可以得到观测器误差动态方程为:
选取Lyapunov函数:

对等式两边进行求导:

可见,当l1>0时估计误差全局稳定。
同理,使用同样的方法对式(12)的2式和3式的干扰进行估计可以得到。使用观测器对系统进行补偿的过程,如图2所示。

图2 基于干扰观测器补偿的控制系统结构图
3 反演滑模一体化控制器设计
Step 1.为了实现导弹制导目的,即导弹命中目标,需要零化视线角速率,即x1→0。本文采用滑模控制,现定义滑模面

考虑式(12)的1式对上式两边求导可得:

由于导弹的气动参数具有时变性,为了削弱抖振,并加快滑模面的收敛速度,选取具有自适应能力的趋近律法,其形式如下:


式中,r1>0,采用反演设计方法,设计虚拟控制量,带入式(22)、式(23)可得:

Step 2.考虑闭环式(12)2式中的 x2与式(23)中的x2c存在偏差,为了消除x2c对x2的估计偏差,采用滑模控制方法,并定义如下滑模面:

将式带入式(24)得Step1精确滑模运动方程:

考虑式(12)的2式,对上式两边求导可得:

同理,对式(12)的第2个子系统,采用自适应指数趋近律,定义:

式中,k2>0,σ2>0 其中 σ2用2来估计,其形式如下:

式中,r2>0,采用反演设计方法,设计虚拟控制量,由式(27)、式(28)可得:



将上式两边求导,并将式(31)带入得:

Step 3.考虑闭环式(12)3式中的 x3与式(30)中的x3c存在偏差,为了消除x3c对x3的估计偏差,采用滑模控制方法,并定义如下滑模面:

将式(34)带入式(24)得Step2中精确滑模方程:

考虑式(12)中的3式,对式(35)两边求导得:

同理,对式(12)的第3个子系统,采用自适应指数趋近律,定义:


式中,r3>0,采用反演设计方法,设计控制量 δz,由式(36)、式(37)可得:



将式(41)两边求导,并将式(40)带入得。

综上,得到基于反演滑模和非线性干扰观测器的制导控制一体化控制器。式(39)为最终的控制方程。
4 稳定性分析
证明:构造如下Lyapunov函数


对式(45)左右求导可得:

对式(46)左右求导可得:


把式(49)带入式(48)可得:

5 仿真分析
为了验证本文所提出一体化控制算法的有效性,本节采用如下方式进行数值仿真验证。
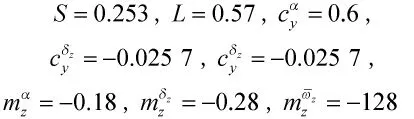
假设导弹与目标均在纵向平面内运动。在末制导段,导弹的初始位置为(0,3 000)/m,导弹速度保持不变v=200 m/s。假设目标的初始位置为(3 000,0)/m,运动状态有3种:静止不动,以vt=80 m/s的匀速运动,以初速度vt=80 m/s加速度at=5 m/s2的匀加速运动。导弹的各项气动参数如下:
非线性干扰观测器、低通滤波器滤波时间常数及控制器参数为:

假设系统存在如下不同干扰,d1=0.1sin(2t),d2=0.1,d3为周期2 s幅值为0.1的三角波。为了验证所设计算法的有效性,对不同干扰的抗干扰能力和不同目标的追击能力,在系统存在干扰的情况下,分别针对有NDO和无NDO进行仿真。在3种运动状态下,两种控制器的对比仿真结果如表1所示。匀速运动情况下有干扰观测器的仿真曲线如图3~图10所示。

表1 3种状态两种控制器下的仿真结果

图3 正弦波干扰的实际值与估计值

图4 常值干扰的实际值与估计值

图5 三角波干扰的实际值与估计值

图6 弹-目相对运动轨迹
从表1中可以看出,在以上的几种情况下都可以保证脱靶量在1 m以内,表明控制器本身具有较强的鲁棒性。在目标状态一致,控制器存在NDO时,导弹的制导精度有明显提升;针对大机动目标,NDO可以明显减少遇靶时间;表明NDO对于提升控制器的性能有较大的作用。
图3~图5分别为干扰项 d1,d2,d3的实际值与估计值,从图中可以看出,针对不同类型的干扰,DNO都可以进行准确的估计。
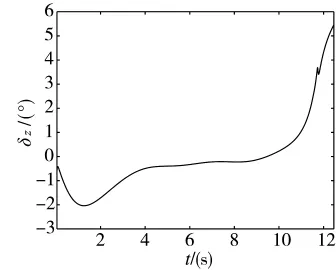
图7 导弹舵偏角变化曲线
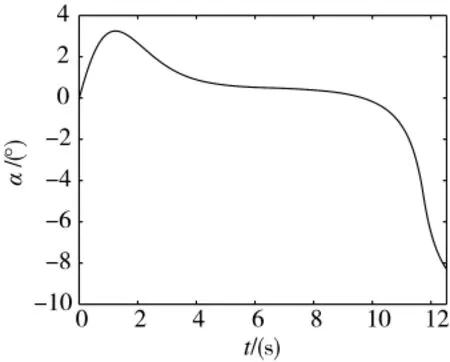
图8 视线角变化曲线
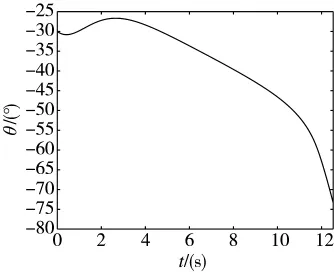
图9 导弹攻角变化曲线

图10 导弹弹道倾角变化曲线
从图6中可以看出,导弹飞行弹道比较平滑,近似直线飞行命中目标,追击时间较短。图7表明本文采用的方法,舵偏角较小且变化平缓,满足实际设计过程中舵偏角为±20°以内的约束条件。图8~图10表明视线角,攻角和弹道倾角变化比较平缓,符合系统设计要求。
基于以上分析,在目标不同运动状态下,存在干扰和不确定性影响的情况下,采用基于非线性干扰观测器和反演滑模的一体化设计方法,导弹可以快速精确地命中目标,而且具有较强的鲁棒性。
6 结论
本文研究了导弹在俯仰平面,针对系统存在的干扰及不确定性问题,设计基于非线性干扰观测器和反演滑模的一体化控制器。设计非线性干扰观测器对干扰进行补偿,并反馈至控制器,在反演滑模控制器设计的过程中,使用自适应趋近律方法减弱抖振,针对反演设计中产生的微分爆炸问题,采用动态面法,引入一阶低通滤波器代替对虚拟控制量进行求导。仿真结果表明,所设计的NDO可以对干扰进行精确地估计,所设计的控制器动态性能较好,鲁棒性强,制导精度高。
猜你喜欢
火力与指挥控制(2022年6期)2022-07-25
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2022年5期)2022-06-06
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年35期)2022-01-14
北京航空航天大学学报(2021年4期)2021-11-24
计算机仿真(2021年3期)2021-11-17
建材发展导向(2021年14期)2021-08-23
北京航空航天大学学报(2021年6期)2021-07-20
中国新技术新产品(2020年19期)2020-12-25
