
增强型混合树RFID防碰撞算法研究
2018-08-21 20:45周伟辉
科技传播 2018年15期
周伟辉
摘 要 为了解决现阶段RFID技术中存在的多标签碰撞问题。针对二叉树算法识别时间长,四叉树算法产生大量空闲时隙而降低识别效率的不足,提出了一种增强型混合树防碰撞(EHT)算法。该算法根据待识别标签数目来动态选择基于树的算法,从而缩短识别时间,提高识别效率和减少所耗总时隙数。仿真结果表明,当待识别标签总数超过1 000时,EHT算法的识别效率仍能维持在65%以上,所耗总时隙数为1 500个左右。因此EHT算法可以很好地解决多标签碰撞问题,并在大规模标签识别场合中具有良好的应用前景。
关键词 RFID;二叉树;四叉树;混合树;防碰撞算法
中图分类号 TP3 文献标识码 A 文章编号 1674-6708(2018)216-0148-02
1 EHT算法分析与实现步骤
1.1 EHT算法设计思想
文章针对基于树的算法识别时间长,识别过程中会产生大量空闲时隙而降低识别效率的不足,提出了一种增强型混合树防碰撞(Enhanced hybrid tree, EHT)算法。在识别过程中根据响应的标签数动态选择二叉树、三叉树和四叉树,共有7个待识别标签数,第一轮识别中采用四叉树算法识别一个标签,产生两个碰撞时隙,第二轮识别成功识别三个标签,第三轮识别成功识别一个标签,产生一个碰撞标签,最后一轮成功识别全部标签,总共搜索查询了4次,只产生一个空闲时隙,可以得出混合树算法能够减少搜索查询次数从而缩短识别时间,同时能减少空闲时隙从而太高识别效率。
EHT算法是基于树的算法的改进,通过标签的碰撞位来进行碰撞标签的分组,当有且仅有一个最高碰撞位时,采用二叉树算法,将最高碰撞位为“0”的标签分组到左子树,将最高碰撞位为“1”的标签分组到右子树;当有最高碰撞位和次高碰撞位连续时,采用四叉树算法,从左到右依次存放的是碰撞位为“00”“01”“10”“11”的标签;若最高碰撞位和次高碰撞位連续但碰撞位“00”“01”“10”“11”不全部存在时,动态选择二叉树或三叉树进行识别,这样可以避免空闲时隙的产生,可以保证无空闲时隙。
1.2 EHT算法流程
在EHT算法中,用堆栈来保存每次碰撞标签的碰撞位信息,并不断重复更新碰撞位信息,直到堆栈为空,算法结束。
EHT算法流程如下:
1)阅读器发送Request(?)命令给所有待识别的标签,?一开始为全“1”,这样可以保证一开始所有标签都能响应。
2)阅读检测碰撞位,并将碰撞位信息存入堆栈中,即执行POP(q)命令,并发送该命令,相应的标签会响应。
3)阅读器根据响应的标签数判断子树的时隙状态,会发生以下3种情况之一:
(1)如果子树上有且仅有一个标签响应,则该子树的时隙为成功时隙,即该标签识别成功,将其转换为休眠状态,跳转至(5)。
(2)如果无标签响应在该子树的时隙上,说明该子树的时隙为空闲时隙,跳转至(5)。
(3)若有两个及两个以上的标签响应,则该子树的时隙为碰撞时隙,跳转至(4)。
4)阅读器检测碰撞标签的碰撞位信息,此时会发生以下两种情况之一:
(1)若阅读器检测出有且仅有一个最高碰撞位时,选择二叉树算法,并将碰撞信息存放在堆栈中,即执行PUSH(0q,1q )命令,跳转至(2)。
(2)若阅读器检测到最高碰撞位和次高碰撞位连续时,选择四叉树算法,并将碰撞位存放在堆栈中,即执行PUSH(××q)命令,跳转至(2)。
5)判断堆栈是否为空,如果不为空,则跳转至(2);如果为空,则算法结束。
EHT算法流程图如图1所示。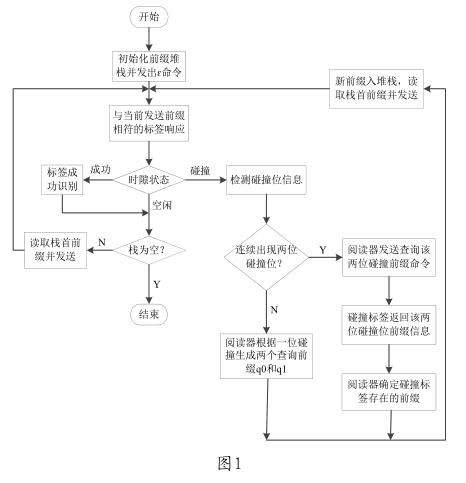
2 实验仿真与分析
在MATLAB平台下编程进行实验仿真,本文算法标签数的最大取值为1000个,标签编码长度为64位,仿真实验100次取其最后平均值,在理想的实验环境下,误差率小于等于5%。将本文EHT算法与CT算法、AHT算法、ISE-BS算法作比较,分别进行了三组仿真实验对比:总时隙数对比、碰撞时隙数对比、算法识别效率对比,仿真结果如图2、3、4所示。
仿真实验一:总时隙数对比
从图2可以看出本文EHT算法在识别标签过程中所耗总时隙数较其他三种算法要少很多,当识别标签数达到1000个左右时,EHT算法所耗总时隙数为1200个左右,而CT算法超过了2000个,这也能说明EHT算法的优越性。而分析其原因是因为EHT算法在识别标签过程中不会产生空闲时隙,而CT算法和AHT算法会产生空闲时隙,这样就增加了总时隙数。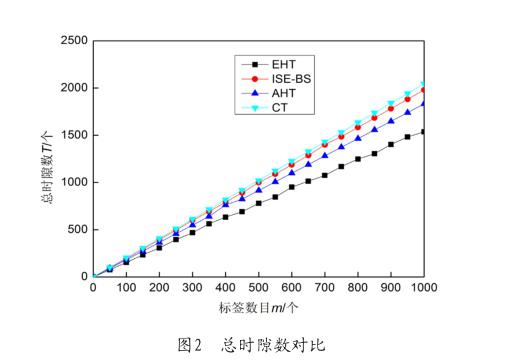
仿真实验二:碰撞时隙数对比
图3为各算法的碰撞时隙数比较,可以看出EHT算法在碰撞时隙数上与ISE-BS算法和AHT算法基本相近,但比CT算法减少了很多,这是因为CT算法利用的纯二叉树算法来进行识别标签,当代识别标签数增大是,碰撞产生的概率大大增加,从而产生了大量的碰撞时隙数。
仿真实验三:识别效率对比
识别效率作为衡量算法的好与坏的一个重要指标,识别效率高的算法更优。图4为各算法识别效率对比,可以得到,EHT算法识别效率是最高的,即使标签数目达到1 000时,仍可以稳定的保持在65%左右,从而可以得出本文提出的EHT算法性能比其他三种算法更高,能够高效解决大量标签碰撞问题。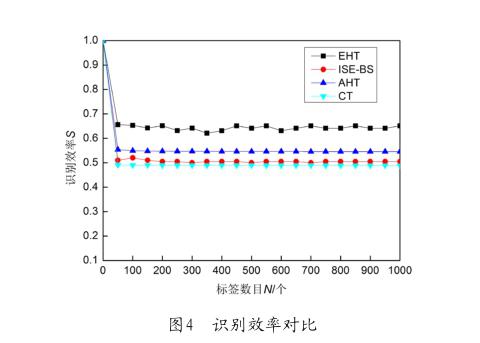
3 结论
本文针对基于树的算法识别时间长,识别过程中会产生大量空闲时隙而降低识别效率的不足,提出了一种增强型混合树防碰撞(EHT)算法。在识别过程中根据响应的标签数动态选择二叉树、三叉树和四叉树,完全可以避免空闲时隙的产生。仿真结果表明,EHT算法可以减少在识别过程所耗总时隙数和碰撞时隙数,并且在提高算法识别效率的同时将其稳定地维持在0.65左右,因此EHT算法适合在需要快速读取大量标签的场合,能够实现快速准确的识别所有标签。
猜你喜欢
电脑报(2022年37期)2022-09-28
现代计算机(2021年14期)2021-07-09
科技创新与应用(2017年35期)2017-12-19
智富时代(2017年6期)2017-07-05
智富时代(2017年6期)2017-07-05
武汉轻工大学学报(2016年4期)2017-01-16
建筑材料学报(2015年3期)2015-02-28
河南科技(2014年24期)2014-02-27
