双馈风电场单机与多机等值模型对次同步振荡特性影响的对比
2018-08-20 07:20牛东晓
电力自动化设备 2018年8期
高 澈,牛东晓,罗 超,周 啸
(1. 华北电力大学 经济与管理学院,北京 102206;2. 华北电力大学 新能源电力系统国家重点实验室,北京 102206;3. 全球能源互联网研究院有限公司,北京 102209)
0 引言
近年来,风电产业在全球范围内得到了迅速发展,通常大型风电场距离负荷中心较远,故串联电容补偿在远距离输电系统中得到了广泛应用,这也是目前大规模风电并网远距离送出主要采用的措施之一。然而,与火力发电机组类似,风电机组经固定串补线路引发的次同步振荡现象,成为大规模风电远距离外送的主要威胁之一。研究表明,在各类风力发电机组中,双馈风力发电机(DFIG)最易发生次同步振荡[1]。实际工程中发生了多起风机次同步振荡事故,最早是在美国德克萨斯州某风电场,汇集送出的一条线路因接地故障切除,形成了该带串补的风电场与系统经带固定串补(补偿度为75%)的单回线路相连的辐射状供电方式,导致了双馈风机与固定串补间相互作用产生持续增幅的振荡现象[2-3],并造成大量风机脱网以及内部Crowbar电路损坏。类似地,次同步振荡现象还发生在加拿大Buffalo Ridge地区[4]和我国华北某地区[5]。
针对带串补的双馈风电场并网送出存在的次同步振荡问题,国内外学者在相关领域已开展了大量研究,建立了双馈风电场经串补送出的小信号模型[6-8],分别从阻抗特性[9-10]和时域角度[11-12]分析了双馈风机次同步振荡的产生机理与影响因素,并提出了基于风机变流器附加阻尼[13-14]及基于柔性交流输电(FACTS)的次同步振荡抑制策略[15-16]等。由于大型风电场中风机数量庞大,构建包含所有风机的系统解析模型十分困难,已有文献大多采用单台风机等值整个风电场,但并未对常用的单机等值模型的精确性和适用性进行分析。
本文主要分析了双馈风电场经串补送出引起的次同步振荡建模过程中,采用单机等值模型与多机等值模型的差异。以2机系统为例,将风电场划分为2个不同配置的子风电场,并假定各子风电场风机参数一致。基于特征值分析对比研究了2个风电场在汇流线路阻抗不同、容量配比不同的情况下,采用单台风机等值模型与2台风机等值模型时次同步振荡特性的差异,进一步地在3机等值系统中进行了验证。
1 系统建模与振荡模式分析
一方面,由于在风电场经串补送出系统中,发生次同步振荡的主要是双馈风电机组,因此本文只考虑由双馈风电机组组成的风电场;另一方面,本文的研究目标是同一风电场中汇流线路阻抗、容量配比、风速等参数对次同步振荡特性的影响,若考虑风机的控制参数,会增加影响因素的维度,也会使研究内容不集中,因此本文假定子风电场中各风机的控制参数相同。本文搭建的2个子风电场经串补送出系统模型如图1(a)所示,子风电场经升压变升至35 kV后接入含串联电容补偿的电网中。图中,DFIG1和DFIG2分别为用于等效处于不同位置的2个子风电场;RL1+jXL1和RL2+jXL2为各子风电场的线路阻抗;N1和N2为各子风电场包含的风机数量。单台风机等值模型如图1(b)所示。等值原则为:等值风机容量S=(N1+N2)SG,SG为实际单台风机容量;等值线路阻抗Re+jXe=(RL1+jXL1)∥(RL2+jXL2);等值风速可保证2个模型的风电场输出功率相等。下文分别介绍各部分的数学模型。
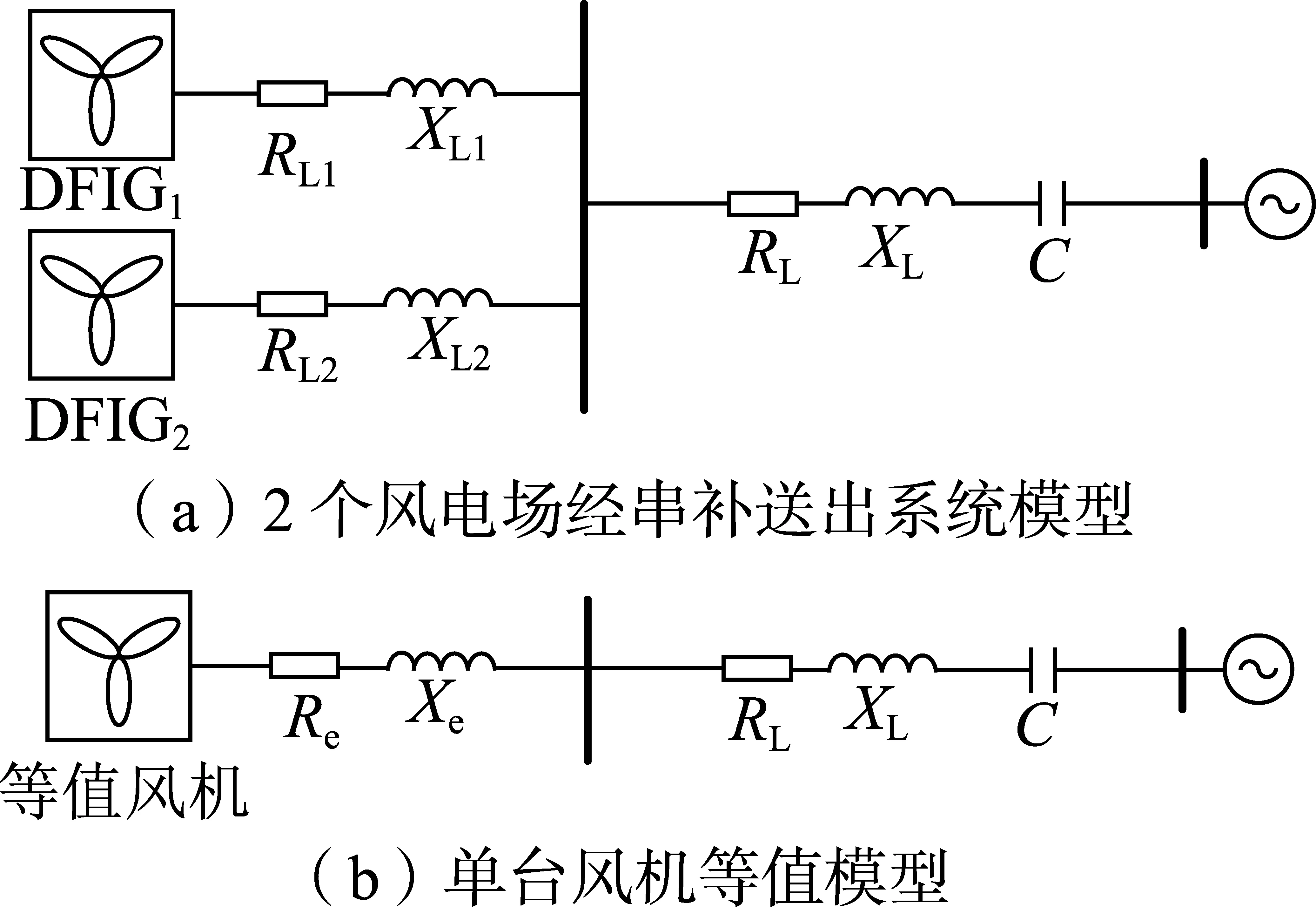
图1 系统等值模型Fig.1 System equivalent model
1.1 双馈风电机组模型
为分析双馈风电场经串补送出的次同步振荡问题,需要建立双馈风电机组的小信号模型[8]。由于在双馈电机及其控制建模方面已有大量较为成熟的研究成果,故本文参考相关文献得到系统小信号模型。
1.1.1 轴系模型
为了充分反映轴系低频和次同步频率的扭振模式,本文采用文献[17]中提出的三质量块模型。
1.1.2 双馈电机模型
双馈发电机定转子绕组均采用电动机惯例,电流与磁链的方向符合右手螺旋法则,通常采用dq同步旋转坐标系下的磁链与电压方程来描述双馈风力发电机的数学模型,本文采用文献[18]中的数学模型。
1.1.3 双馈变流器模型
双馈风力发电机的定子直接与电网相连,转子通过背靠背变流器并网。该背靠背变流器由转子侧变流器(RSC)和网侧变流器(GSC)组成,其直流侧模型可采用文献[7]中的直流电容电压动态过程表示。
根据文献[18]中的RSC、GSC数学模型,RSC采用基于定子磁链定向的控制策略,GSC采用基于q轴电网电压定向的矢量控制策略[19-20]。其中,RSC通过调节d轴电流来控制无功功率,通过控制发电机转速进而实现q轴有功电流控制,转速参考值由风速-转速曲线确定;GSC控制策略中,q轴用于控制直流电压,d轴用于实现GSC的无功功率控制。
1.2 串补线路模型
假设交流系统三相对称、线路参数对称,则变换至dq旋转坐标系下的串补线路动态方程为:
(1)
(2)
其中,ωb为角频率基值;ucd和ucq、utd和utq、usd和usq分别为串补电容电压、风机汇集母线电压和系统电源电压的d、q轴分量;iLd、iLq分别为串补线路电流d、q轴分量。
此外,风机接入汇流母线的各电流还需满足基尔霍夫电流定律,作为系统和双馈风力发电机的接口方程,即:
(3)
其中,isd、isq分别为各等值风机定子侧电流的d、q轴分量;igd、igq分别为GSC电流的d、q轴分量。
1.3 系统动态方程
根据双馈电机模型、轴系模型、变流器模型及采用的RSC和GSC控制策略,结合串补线路模型中的式(1)—(3),可得系统动态方程的一般形式如下[20]:
(4)
其中,x为状态向量;y为代数向量;u为输入向量;f为微分方程组;g为代数方程组。
x=[ω1,ω2,ω3,δ1,δ2,δ3,isd,isq,ird,irq,xQs,xird,xω,xirq,udc,igd,igq,xudc,xigd,xQg,xigq,ucd,ucq]T;y=[usd,usq,urd,urq,ugd,ugq]T;u=[ωref,Qsref,Qgref,udcref]T。其中,δ1、δ2、δ3分别为叶片、低速轴、高速轴的转子角,单位为rad;ω1、ω2、ω3为对应质量块角速度标幺值;udc为直流侧电压;ugd、ugq分别为GSC电压d、q轴分量;urd、urq和ird、irq分别为RSC电压和电流d、q轴分量;xω、xQs分别为RSC转速和无功功率外环PI控制器的输入状态量;xudc、xQg分别为GSC直流电压和无功功率外环PI控制器的输入状态量;xird、xirq分别为RSC电流内环d、q轴PI控制器的输入状态量;xigd、xigq分别为GSC电流内环d、q轴PI控制器的输入状态量;ωref、Qsref和Qgref、udcref分别为转子转速参考值、RSC和GSC的无功功率参考值及直流电压控制参考值。
1.4 多机等值模型
当如图1(a)所示的多个等值风机接入汇集母线时,可将式(3)所示的接口方程进行扩展,作为系统和多机等值模型的接口方程,即:
(5)
其中,iL jd、iL jq(j=1,2,…,n)分别为各等值风机输出电流的d、q轴分量。此外,各等值风机输出电流与其定子侧电流、GSC电流之间满足:
(6)
其中,isjd、isjq和ig jd、ig jq分别为各等值风机定子侧电流和GSC电流的d、q轴分量。同时,各等值双馈电机并网点电压、输出电流、风电场汇集母线电压及各自线路阻抗间还应满足:
(7)
其中,ugjd、ugjq分别为各等值风机并网点电压d、q轴分量。
1.5 振荡模式分析
结合系统动态方程及多机等值模型,消去中间变量,并进行线性化[6-7],可以得到如式(8)所示的状态方程。

(8)
系统的稳定性可通过特征矩阵A的特征值进行分析。对于单机系统,状态变量共23个,其中6个与轴系动态相关,4个与风机定转子电流相关,4个与RSC控制相关,1个与直流电压动态相关,4个与GSC动态相关,2个与GSC输出电流相关,2个与串联电容动态有关;双机系统状态变量共44个,包括42个风机状态变量、2个串联电容状态变量。以图1所示系统为例进行特征值分析,单台风机参数和风速-转速曲线数值分别如附录中表A1和表A2所示[20]。同一风电场线路参数XL=0.21 p.u.,RL=0.03 p.u.,C=13.677 1 p.u.(线路等值串补度为50 %), 容量基值Sb=160 MV·A。 在风速为8 m/s、XL1=0.1 p.u.、XL2=0.02 p.u.工况下,采用特征值分析得到了系统的振荡模式,其结果如表1所示。

表1 振荡模式Table 1 Oscillation modes
由表1可知,直流电压动态、d轴电流动态、q轴电流动态的振荡模式具有较大正阻尼,同时根据文献[7]的研究成果可知,这并不属于风机主要的次同步振荡问题,后续的分析主要针对风机与串补间的次同步振荡模式展开。
2 线路阻抗的影响
线路阻抗对次同步模态特征值的影响分为2种情况进行考虑:情况1是考虑两风电场在同一风速下,其中一个风电场线路阻抗变化对次同步模态特征值的影响;情况2是考虑两风电场在不同线路阻抗下,其中一个风电场风速的变化对次同步模态特征值的影响。由文献[5]可知,我国华北某风电场实际并网阻抗为0.06 p.u.左右,为使得本文的仿真与计算更贴近实际,更为合理,在对比分析时设定风电场阻抗在0.02~0.1 p.u.范围内变化。
2.1 情况1
固定风电场1的线路参数XL1=0.02 p.u.,风电场2的线路参数XL2在0.02~0.1 p.u.之间变化,当2个风电场的风速同时分别为6 m/s、7 m/s、8 m/s、9 m/s、10 m/s时,次同步模态特征值分析结果如附录中表A3所示。由表A3可知,随着线路阻抗的增大,单机等值模型和双机等值模型的振荡频率均呈现增加趋势;在6~9 m/s风速下,二者的阻尼随线路阻抗增大而增大,在10 m/s风速下随阻抗增大而减小。从具体的特征值计算结果可以看出,随着阻抗的增大,单机等值模型和双机等值模型之间的差异逐渐增大。原因是DFIG1线路阻抗不变,当DFIG2的线路阻抗从0.02 p.u. 增大至0.1 p.u.时,在忽略线路电阻的情况下,其阻抗变化幅度达到5倍,因此所引起的特征值变化也较为显著。而采用单机模型等值时,根据第1节系统建模中的线路阻抗等值原则Re+ jXe=(RL1+ jXL1)∥(RL2+ jXL2),在同样忽略线路电阻的情况下,等值的单机模型线路阻抗变化显著小于双机模型,所引起的特征值变化范围也显著小于双机模型,因此单机模型与双机模型间的差异随之增加,但是两者的变化是规律一致的。

图2 不同线路阻抗下的时域仿真结果Fig.2 Time-domain simulative results under different line impedances
图2给出了风速为8 m/s,XL2分别为0.1 p.u.和0.02 p.u.,串联补偿在20 s投入时风电场输出有功功率的时域仿真结果,图中Pout为标幺值,后同。由图2(a)可以看出,双机等值模型在XL2=0.1 p.u.时有功功率收敛最快,单机等值模型XL2=0.1 p.u.次之,双机等值模型XL2=0.02 p.u.与单机等值模型XL2=0.02 p.u.的结果基本相同,收敛最慢。由图2(b) 可以看出,采用双机等值模型,XL1=0.02 p.u.,XL2=0.1 p.u.时的振荡频率为30.5 Hz左右,与特征值分析结果31.07 Hz接近,可见上述时域仿真结果与特征值分析结果基本一致。
2.2 情况2
设置线路阻抗XL1和XL2分别为0.02 p.u.和0.1 p.u.,给定子风电场DFIG1风速v1分别为6 m/s和10 m/s,改变子风电场DFIG2的风速,变化范围为6~10 m/s;同样地,给定子风电场DFIG2风速v2分别为6 m/s和10 m/s,改变子风电场DFIG1的风速,变化范围为6~10 m/s。图3和图4分别为给定子风电场风速为6 m/s、10 m/s时的次同步振荡模态分析结果。

图3 情况2下次同步振荡模态变化轨迹(风速6 m/s)Fig.3 Locus of sub-synchronous oscillation mode in Case 2 at wind speed 6 m/s

图4 情况2下次同步振荡模态变化轨迹(风速10 m/s)Fig.4 Locus of sub-synchronous oscillation mode in Case 2 at wind speed 10 m/s
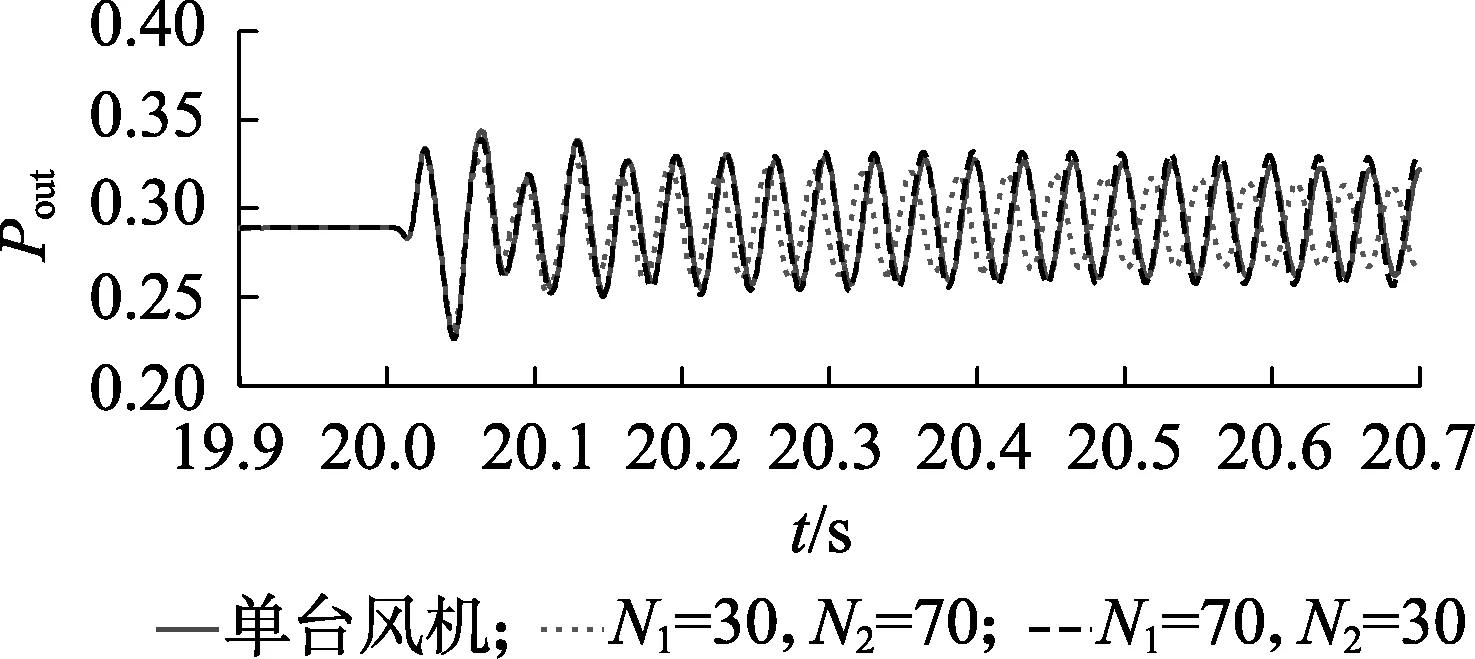
图3是给定风速为6 m/s时的变化曲线,可以看出,变化初始时刻,DFIG1和DFIG2均运行于6 m/s,因此二者重合,随着风速的增加,二者出现显著的偏差,且DFIG1模态变化范围更大。由于XL1 图4是给定风速为10 m/s时的变化曲线,同样可以看出,距离汇流母线近的DFIG1曲线变化范围更大,对系统次同步振荡特性的影响更显著。对于单机模型而言,变化初始时子风电场间风速的差异最大,因此单机和双机模型的差异也较大,但随着2个子风电场间风速趋于一致,2种模型的差异随之减小。综合图3和图4的分析结果可以看出,在同一风速情况下,单机等值模型与双机等值模型特征值随风速的变化规律仍然是相同的。 图5给出v1=6 m/s、v2=10 m/s和v1=10 m/s、v2=6 m/s这2个典型工况下的时域仿真结果。图5(a) 的仿真结果表明,v1=10 m/s、v2=6 m/s时双机等值模型与单机等值模型特性相似,有功功率振荡收敛最快,v1=6 m/s、v2=10 m/s时双机等值模型收敛最慢。而从图3和图4的模态变化分析中可以看出,v1=10 m/s、v2=6 m/s时系统阻尼大于v1=6 m/s、v2=10 m/s时的系统阻尼,这与图5(a)的仿真结果基本一致。由图5(b)可以看出,XL1=0.02 p.u.、v1=10 m/s、XL2=0.1 p.u.、v2=6 m/s时的振荡频率为30.79 Hz 左右,而计算得到该工况下的特征值振荡频率为31.1 Hz,因此,仿真与计算结果也较为接近。 图5 时域仿真结果Fig.5 Time-domain simlutive results 保持整个风电场风机总数不变,2个子风电场的风速相同,变化范围为6~10 m/s,改变2个风电场的风机数量(N1从30至70变化,N2从70至30变化)以改变子风电场的不同容量配比,线路阻抗XL1和XL2分别为0.02 p.u.和0.1 p.u.时,次同步振荡模态分析结果如图6所示。图中,“*”表示双机等值模型的结果;“△”表示单机等值模型的结果。 图6 不同风速和容量配比下次同步振荡模态变化轨迹Fig.6 Locus of sub-synchronous oscillation mode at different wind speeds and capacity configurations 由图6可以看出,在整个风速变化范围内,次同步振荡模态频率随N1的增大而减小;在高风速区域(9~10 m/s),阻尼随N1的增大而增大,在低风速区域(6~8 m/s),阻尼随N1的增大而减小。当N1较大时,采用双机等值模型与单机等值模型分析得到的阻尼特性接近。原因在于XL1较小,DFIG1离汇流母线更近,因此风电场中风机主要集中在汇流母线处,风电场总的阻尼特性由汇流母线处的风机决定。根据单机模型的线路阻抗等值原则,单机等值模型与汇流母线距离较短,使得二者的结果较为一致。但随着N1的减小,风电场中多数风机距离汇流母线较远,风电场阻尼特性由远离汇流母线的等值风机决定。由于单机等值模型距离汇流母线较近,故无法准确反映风电场阻尼特性;而双机模型中既有距离汇流母线近的DFIG1,又有距离汇流母线远的DFIG2,N1减小时,DFIG1的权重减小,DFIG2的权重增大,仍可准确反映风电场阻尼特性。因此,采用单机模型和多机模型分析得到的阻尼特性差异变大,但单机模型随风速变化的规律与双机模型随风速变化的规律仍然是相同的。 图7给出了风速为8 m/s时,2种不同容量配比工况下双机等值模型与单机等值模型的时域仿真结果。根据图6的分析可知,风速为8 m/s时,阻尼随N1的增大而减小,且由图7可以看出,N1=70时双机等值模型与单机等值模型的振荡特性接近,功率振荡衰减较慢;而N1=30时,双机等值模型振荡衰减较快。由此可见,时域仿真结果与图6所示的特征值结果分析基本一致。 图7 不同容量配比下的时域仿真结果(风速8 m/s)Fig.7 Time-domain simlutive results with different capacity configurations at wind speed 8 m/s 为了进一步验证本文结论的正确性,在3机风电场等值系统上进行了验证,其具体分析过程见附录B,可知采用3机风电场等值模型与双机风电场等值模型得到的结论是一致的。 本文将大型双馈风电场划分为2个子风电场,并以此为例,在风机参数一致的情况下,采用特征值分析对比研究了2个子风电场在不同汇流线路阻抗、不同容量配比情况下,采用单台风机等值模型与双机等值模型时整个风电场的次同步振荡特性的差异,得到的结论如下。 a. 风速、风电场容量配比及线路阻抗参数不同对采用双机等值模型的双馈风电场次同步振荡特性有一定影响,且离汇流母线较近的子风电场对系统振荡特性影响较大;采用单机模型等值整个风电场会引入误差,但离汇流母线近的子风电场容量配比越大,二者误差越小。 b. 当双馈风电场风速、风电场容量配比及线路阻抗等参数变化时,单机等值模型与双机等值模型对次同步振荡的影响规律是一致的。因此,采用单机等值模型能够反映整个风电场次同步振荡特性的变化规律,仍可作为研究风电场经串补送出系统产生机理的基本模型。 c. 研究某一双馈风电场的次同步振荡特性时,可以根据其电气距离远近将大型双馈风电场进行合理划分,这样可以在一定程度上减少建模数量,同时保证一定的精度。 附录见本刊网络版(http:∥www.epae.cn)。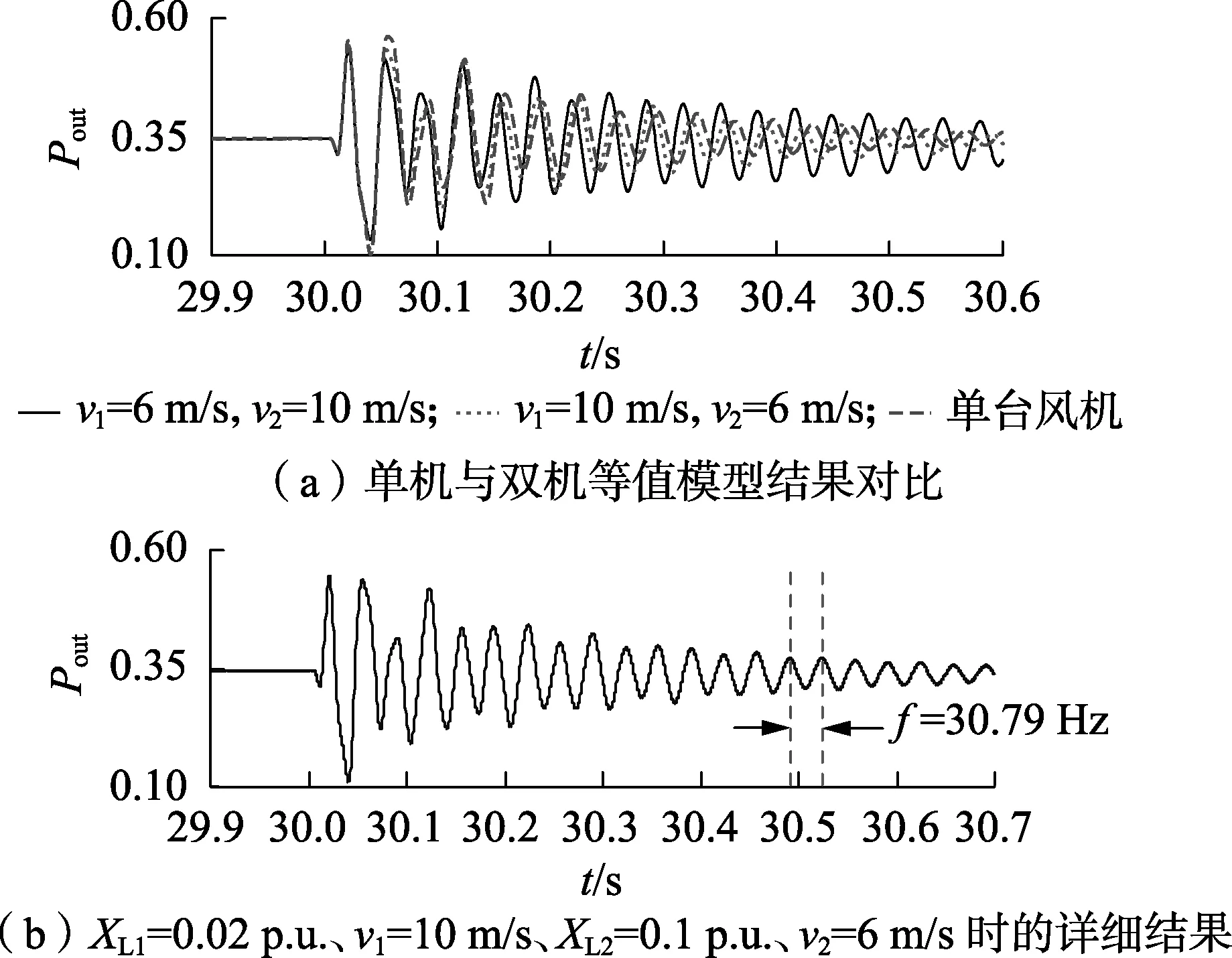
3 风电场不同容量配比的影响

4 结论
猜你喜欢
大电机技术(2022年3期)2022-08-06
防爆电机(2021年6期)2022-01-17
新疆钢铁(2021年1期)2021-10-14
船舶标准化工程师(2019年4期)2019-07-24
航天工业管理(2019年11期)2019-04-20
铁道通信信号(2018年7期)2018-08-29
能源(2017年9期)2017-10-18
制造技术与机床(2017年4期)2017-06-22
电测与仪表(2015年16期)2015-04-12
大电机技术(2015年5期)2015-02-27