
基于TMR元件的电流传感器的研制*
2018-08-14 00:11王海宝郭海平王于波王峥郭彦
电测与仪表 2018年9期
王海宝,郭海平,王于波,王峥,郭彦
(1.北京智芯微电子科技有限公司 北京市电力高可靠性集成电路设计工程技术研究中心,北京 100192;2.北京智芯微电子科技有限公司 国家电网公司重点实验室 电力芯片设计分析实验室,北京 100192;3.江苏多维科技有限公司,江苏 张家港 215634)
0 引 言
随着电力系统复杂程度的日益提高,对电能的测量也趋于精细化,这就需要提高电流测量的精度,特别是对于目前猖獗的窃电行为,只有高精度的电流测量能力,才能有效检测并减少该行为的发生[1];同时,电网中含有大量的谐波信息,影响系统稳定性,如何获得此信号的信息也是传感器设计的一个方面[2]。随着电网监控网点的铺开,需要大量的电流传感器。因此,研究高精度、低成本、多功能的电流传感器,就成了一个目前较为急迫的课题。
对电流进行测量的传感器或者系统,主要有以下几种:
(1)采样电阻,其优势在于成本非常低廉,但是缺点也非常明显:大电流时发热严重、测量端和被测量端没有电气隔离,从而使得电力系统中无法使用该方法进行高压大电流的测量;
(2)电流互感器,其为目前被广泛采用的测量电流的元件,只能测量交流的电流。由于电感的存在,输出信号和被测电流信号之间存在信号相位的偏差。在较大电流下,非线性误差较大,电流测量精度不高。由于电流互感器中使用了磁芯,而在电流较大情况下,磁芯存在饱和的风险,因此需要专门对磁芯进行设计,并且加上必要的保护电路[3-4];
(3)光学电流互感器,利用光学原理,该互感器解决了磁芯带来的困扰,但存在温漂大、稳定性差和易受电磁干扰的问题[5];
(4)罗氏线圈,其与电流互感器最大的区别是选择了无磁芯的结构,在非磁性材料的骨架上绕制空心螺线管。由于没有磁性材料的使用,罗氏线圈具有抗外界干扰、响应快、不饱和的特点[6-8]。但罗氏线圈在制作上较为繁琐,对绕制精度有一定的要求,且不能测量直流电流;
(5)霍尔器件,此利用霍尔效应直接测量被测导线附近的磁场,而磁场信息包含了电流中的所有物理量,因此是最直接的电流测量方法,有效克服了线圈类传感器的测量频段问题[9-10]。此外霍尔传感器直接用电压或者电流驱动,电路简单[11]。目前霍尔器件已经大批量生产,成本低廉,用霍尔器件构建的电流传感器也已经得到了大量的应用[12]。但是霍尔器件温度特性较差,需要复杂的温度补偿电路。
TMR元件与霍尔元件一样,直接测量磁场,可以得到被测电流中所有的物理量。同时,与霍尔元件相比,TMR元件具有温度特性好、灵敏度高、成本较低的特点,在电流测量领域具有较好的应用潜力[13-14]。文中结合电流传感器的应用要求,阐述了TMR元件的原理,电流传感器中TMR元件的设计,并构建了开环电流传感器。
1 电流检测原理与设计
通过设计特殊形状的导线,使导线附近存在两个位置,此两个位置磁场大小相等,方向相反,且磁场大小正比于导线中的电流大小。线性TMR元件的输出电压正比于外加磁场,将两个TMR元件放置于上述两个位置,即可形成梯度结构的电流传感器。下面从TMR元件设计开始,阐述整个设计过程。
1.1 TMR元件设计
TMR元件的最小结构单元是磁隧道结,结构如图1所示。其基本结构是三层膜结构,隧道层两侧分别为自由层和被钉扎层,其中被钉扎层的磁矩方向固定,通常用人工反铁磁耦合的方法实现磁矩的钉扎。隧道层是埃米级厚度的镁或铝的氧化物,可被隧穿。自由层是高磁导率的铁磁材料,其磁化方向受外界磁场的调制[15]。自由层的磁矩和被钉扎层的磁矩之间的夹角,决定了磁隧道结的磁电阻R。
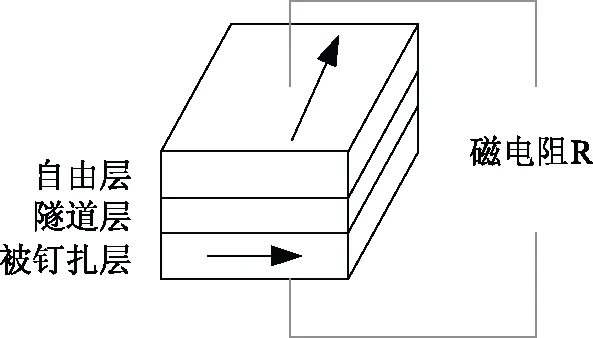
图1 磁隧道结典型结构Fig.1 Typical structure of magnetic tunneling junction
对于隧道结中的自由层,其磁化方向取决于系统的最小能量,系统能量包括:被测磁场提供的能量、偏置磁场提供的能量、退磁场能以及各向异性能。如图2所示,当有被测磁场Ha时,自由层的磁矩M稳定在某一角度(图2中的θ),那么自由层和被钉扎层磁矩夹角为90o-θ。而磁电阻R满足式(1),其中C1和C2为与TMR薄膜有关的常数,(由于篇幅有限,在此不对θ进行详细推导,仅给出最终灵敏度测试结果)。
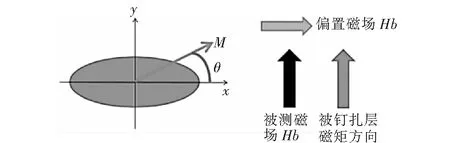
图2 自由层磁矩方向的决定因素Fig.2 Factors determines magnetic moment of free layer
(1)
通过测量磁电阻R的值,即可计算出外界磁场的大小,继而推算出被测电流的信息。在实际应用中,通常将四个灵敏方向不同的电阻电气连接成桥式结构,桥式结构的输出电压与外界磁场成线性关系。桥式结构如图3左图所示,图中R1和R4的灵敏方向一致,且反平行于R2和R3(图中箭头代表灵敏方向),当有外加磁场时,差分输出信号(V+)-(V-)的曲线如右图所示。此电路的特点是:输出信号是线性信号。
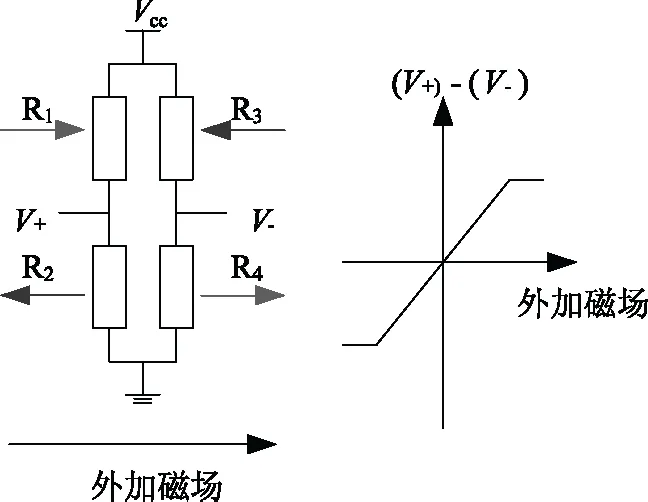
图3 全桥结构(左图)以及其输出曲线(右图)Fig.3 Full-bridge structure (left side) and its transfer curve (right side)
1.2 电流传感器中磁场分布仿真
当有电流流过通电导线时,在导线周围就会存在磁场,将TMR元件放置于某一位置,即可测量出导线产生的磁场大小与方向,进而推算出电流大小和方向。设计了一种类似U形的导线结构,以产生两个位置,在这两个位置处,磁场大小相等,方向相反。通电导线如图4所示,其中整个方框是有限元仿真的边界,方框内部是通电导线,电流方向如图中箭头所示。在中小电流测量应用中,一般电流量小于50 A,论文用针对50 A的电流测量应用,展开基于TMR元件的电流传感器设计和验证。
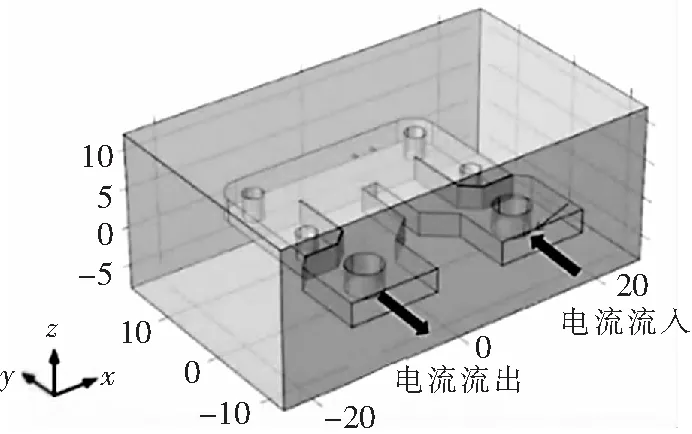
图4 通电导线结构图Fig.4 Structure diagram of electricity line
图5是三维仿真图,图中箭头代表磁力线的方向。图6是以通电导线的平面为视角,绘制的磁场分布图,从图中可以看出,在x轴方向,通电导线的两侧具有方向相反的磁场。如果将两个TMR元件分别放置在通电导线两侧,如图6中箭头起点位置所指,这两个传感器将组成梯度的结构,在测量通电导线的磁场的同时,免除外界均衡磁场的干扰(如地磁场)。
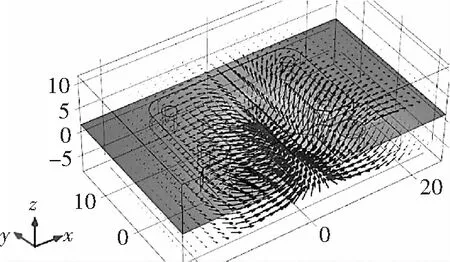
图5 施加电流50 A时,导线周围磁场分布Fig.5 Magnetic field distribution when 50 A current is applied
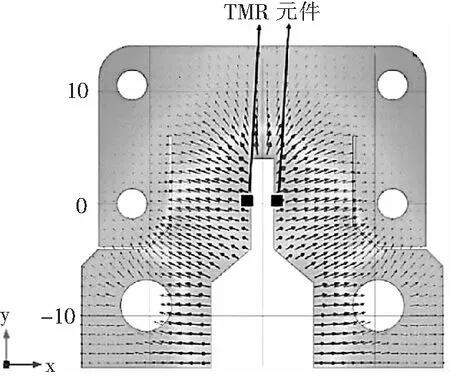
图6 平面内磁场和传感器放置位置Fig.6 Magnetic field in plane and position of sensor
在实际应用中,传感器不可能位于通电导线的表面,而是位于通电导线上方的某个位置。在通电导线和TMR元件之间,是PCB板和TMR元件的封装体。通常情况下,PCB板厚度为1 mm左右,而TMR元件的底部到TMR的灵敏部位距离为0.5 mm(即封装体下半部分厚度为0.5 mm),因此通电导线到TMR灵敏部位的距离为1.5 mm左右。
图7是有限元仿真的二维图,图中曲线为磁场的磁力线,A和B分别为文中使用的导线的两个截面,截面的长和宽分别为7 mm和3 mm,两导线间距为2 mm。下面考察当传感器和导线间距为1.5 mm时,如何选择传感器的水平位置。
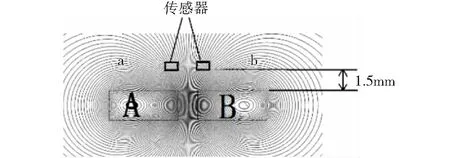
图7 导线周围磁场分布的二维图Fig.7 2-D view of magnetic field produced by leads
图8是图7中一条直线上的水平方向的磁场分量,该直线距离导线1.5 mm,其中水平位置零点即两个传感器的中点位置。从图中可见,在5 mm和-5 mm处,磁场具有极值,绝对值为10 Gs左右。因此,两个传感器的最佳间距为10 mm。此外,为了得到较高的电流测量精度,TMR元件的线性工作范围应大于10 Gs。
由于电流与磁场是线性关系,且两个传感器处电流产生的磁场方向相反,因此,两个传感器位置处的磁场满足下面表达式:
Ha= 0.2×I+Hdistube
(2)
Hb=-0.2×I+Hdistube
(3)
其中Ha和Hb分别为图7中传感器a和b位置处的磁场,I为导线中电流,Hdistube外部干扰磁场,由于两个传感器位置较近,地球磁场或者外部干扰磁场在两个传感器位置处产生的分量可以认为是一致的。
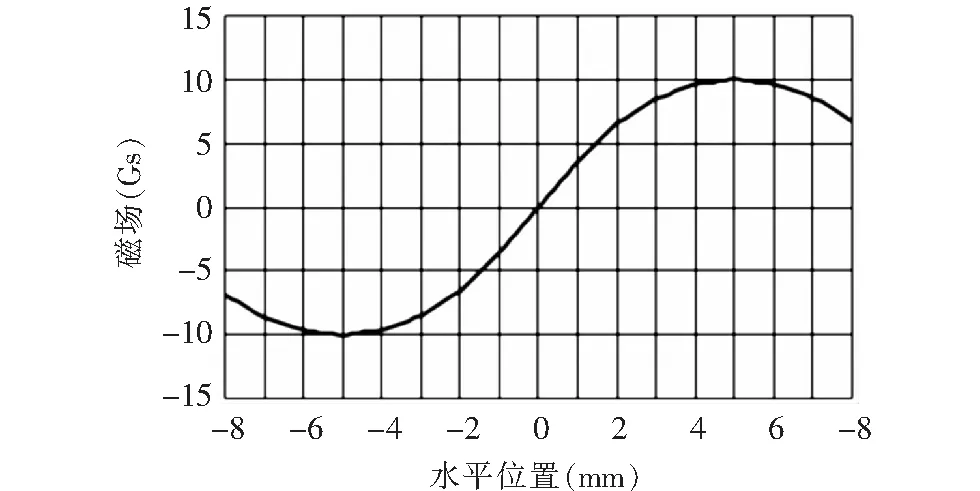
图8 传感器位置处的水平方向磁场分量Fig.8 Horizon component of magnetic field where sensor locates
1.3 TMR元件的制备和测试
TMR元件的制备过程如下:利用溅射镀膜的工艺,在硅基板上依次沉积下电极层、种子层、人工反铁磁层、MgO隧道层、自由层和上电极层;再利用刻蚀的方法,制作出磁隧道结;再在上电极层构建电气互连结构,实现隧道结的互连,以构成磁电阻;将裸晶圆放置在引线框上,对位安装、打线、注塑、脱模,最终形成封装好的TMR元件。磁隧道结的膜层体系为IrMn/CoFeB/Ru/CoFeB/MgO/ CoFeB/NiFe/Ta,磁隧道结尺寸为4 μm×20 μm,每一个磁电阻(图3中的R1~R4)具有300个磁隧道结。
图9是实际研制的TMR元件随外加磁场的响应曲线,其中电源电压为5 V,从图中可算出,该TMR元件的灵敏度为4.4 mv/v/Oe,远高于霍尔元件。在15 Gs以内,其线性度非常好。此外,在没有外加磁场时,offset电压为1%Vcc,说明工艺一致性比较好。
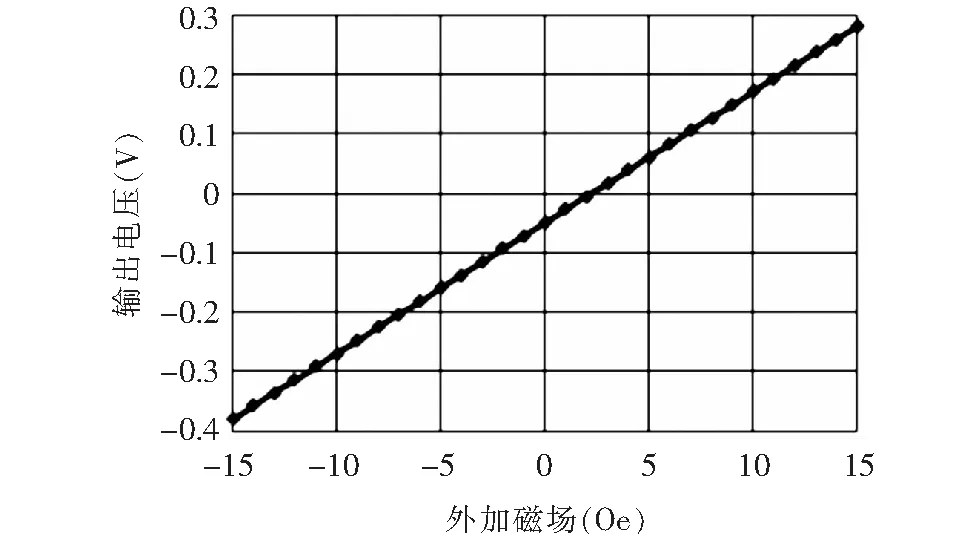
图9 TMR元件输出响应曲线Fig.9 Response curve of TMR device output
结合式(2)和式(3),可得传感器a和b的输出电压表达式为:(输入电压为1 V,输出电压单位为mV)
Va=4.4×(0.2×I+Hdistube)
(4)
Vb=4.4×(-0.2×I+Hdistube)
(5)
令传感器输出电压为:
Vo=Va-Vb=8.8×0.2×I
(6)
由式(6)可见,通过将两个传感器构成梯度的方式,可以免除外界干扰磁场的影响。
2 电流传感器构建和性能测试
图10是利用TMR元件构成的开环电流传感器模块,其中电流导线位于PCB背面,两个TMR元件位于PCB正面,在放置TMR元件时,需保证TMR元件的灵敏部位关于电流导线对称分布,两个TMR元件的间距为10 mm。由于TMR元件本身信号较小,为了使系统能够识别器信号,需要用运放将传感器信号进行放大,为了消除运放带来的非线性,选择了高精度的仪表运算放大器。
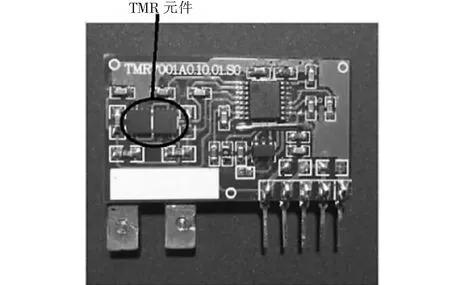
图10 基于TMR元件的电流传感器Fig.10 Current sensor based on TMR device
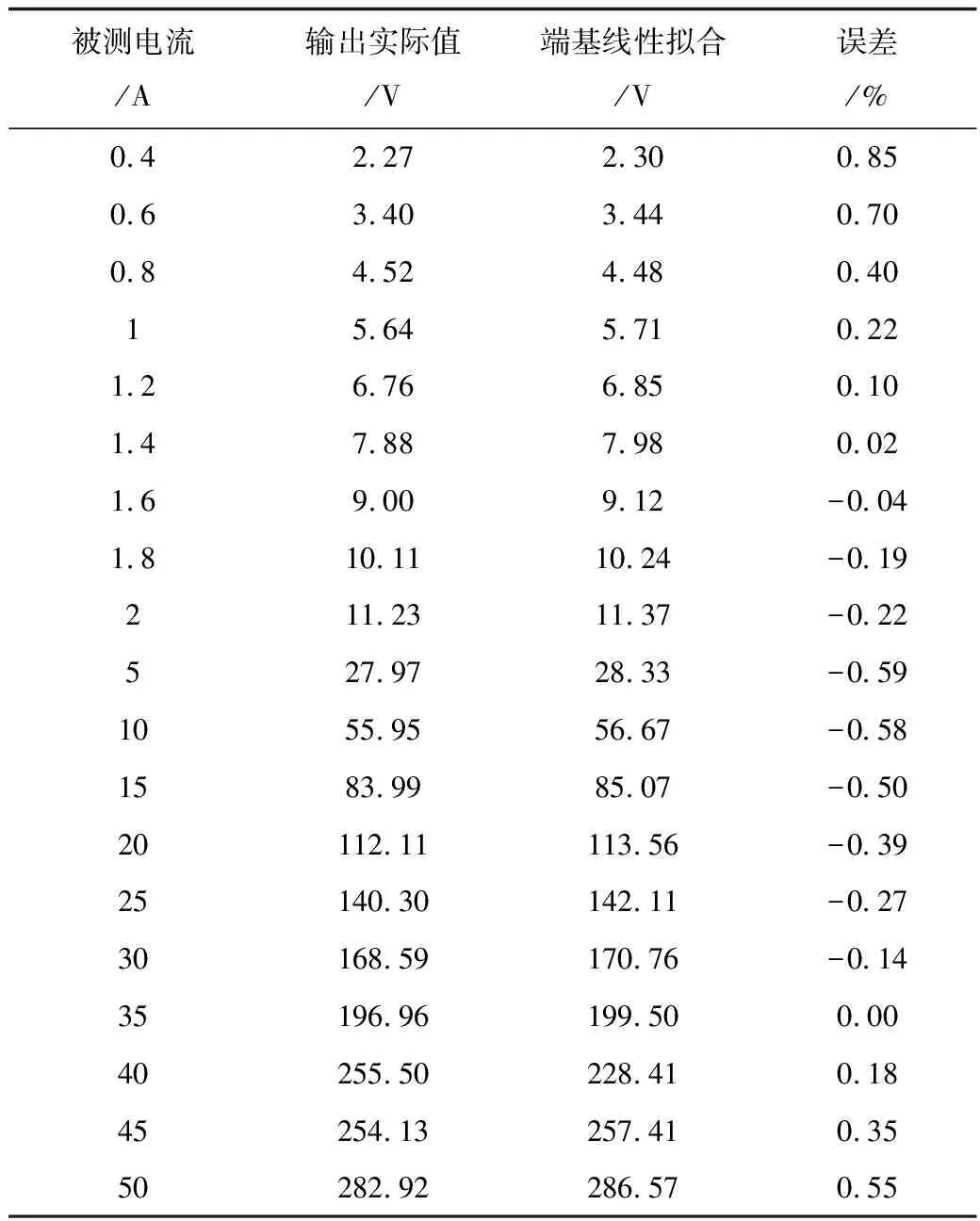
表1 电流传感器DEMO测量结果Tab.1 Test result of current sensor DEMO
表1是所研制的TMR电流传感器模块实际测试结果,从表中可以看出,电流测量误差在1%以内。
其中小电流时的误差稍大,其原因可能为:当电流很小时,TMR元件位置处的磁场很小,此时元件的噪声信号、放大电路的噪声和非线性不可忽略,引起测量误差。
3 结束语
阐述了一种基于TMR元件的电流传感器的研制方法,利用该方法构建的电流传感器模块,在50 A的电流范围内,测量误差小于1%,证明了TMR元件作为电流传感器中的磁敏元件的可行性。当被测电流较小时,测量精度有所下降,使得在微小电流测量时,精度可能会达不到要求,需要从TMR元件本底噪声、电子回路噪声方面去进行研究。目前基于TMR元件的电流传感器尚未得到大量开发,在实际生产和应用中,还需要对TMR电流传感器的每个指标进行大量的实验验证。
猜你喜欢
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
童话王国·文学大师班(2017年6期)2017-07-10
中学生数理化·高二版(2016年12期)2017-02-28
现代工业经济和信息化(2016年2期)2016-05-17
Coco薇(2016年1期)2016-01-11
太空探索(2015年6期)2015-07-12
电子工业专用设备(2015年4期)2015-05-26
汽车维修与保养(2015年8期)2015-04-17
无机化学学报(2014年3期)2014-02-28
