
一种高效侧方位停车辅助装置设计及实现
2018-08-09 08:27赵金国阎治安周美丽焦文芳
微特电机 2018年7期
赵金国,阎治安,周美丽,焦文芳
(1.西京学院,西安 710123;2.西安交通大学,西安 710049;3.延安大学,延安 716000)
0 引 言
随着汽车拥有量的增加,停车已成为中国汽车司机的一个痛点。停车资源不足,导致停车空间不足。加之,停车空间不能有效利用,造成了公共资源的浪费[1]。目前,作为侧方位停车辅助装置有自动泊车和人工机械式泊车辅助装置。虽然在一定程度上增加了侧方位泊车的功能,提高了效率,部分解决了人力难度,但同时也存在一些缺点:自动泊车在停车位置有极限的时候是很难做到的,人工机械式侧方位泊车耗时费力。上述2种状况在侧方位停车位置极限难度时很难做到,使用效率不高。
本文设计了一种辅助装置来实现汽车高效率侧方位停车,其采用电动推杆作为执行器,由遥控器操作,可以有序、安全、快速、高效地完成侧方位停车[2],也可减轻道路停车压力。电动推杆不仅可以降低气动和液压要求的气/液源设备和辅助设备,还可以减少执行器的质量。使用电动推杆执行器,在起动可变控制系统时需要电源,起动后不再需要电源,而且电动推杆具有相对明显的节能优势[3]。
1 基本结构和工作原理
1.1 基本结构
本文研究了一种轿车侧方位停车辅助装置,其结构图如图1所示。将停车辅助装置分别设置在轿车底盘的左前、右前、左后和右后位置,通过定位臂和活动摇臂固定在车梁上,在汽车停车制动、熄火后使用。该装置可以有效利用空间,便于在停车位置极限难度的情况下使用,操作方便,具有节能环保、节省车辆占地空间等优点。在车辆更换轮胎的过程中,停车辅助系统可起到替换机械式千斤顶的作用,减少更换轮胎的操作时间,提高工作效率。

(a) 支撑图

(b) 收缩图
1.2 工作原理
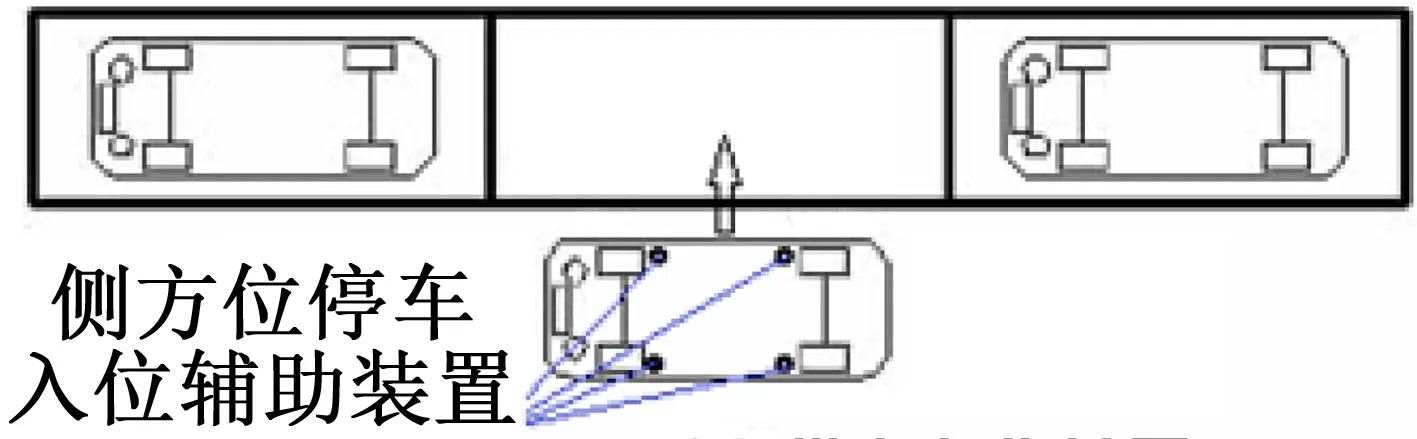
利用遥控器控制水平电动推杆和垂直电动推杆配合使用,起到升降车身的作用。轮毂电机驱动支撑轮转动,横向移动汽车整体车身。起动控制器控制水平电动推杆收缩至末端,活动摇臂在水平电动推杆作用下左旋,然后垂直电动推杆伸出,直至电动推杆与支撑轮垂直,支撑起汽车整体车身,使汽车车轮离开地面一定距离时自行停止,再由轮毂电机反向转动,带动汽车整体左移,移位至用户所需位置后停止运动。再起动控制器控制垂直控制电动推杆向上收缩至末端,然后控制水平电动推杆向左伸出,活动摇臂在水平电动推杆的作用下右旋,将垂直电动推杆与支撑轮收至车底与车梁平行且定位,此时水平电动推杆自行停止工作,控制器自动断电。反之,则亦然。轿车横向泊车装置工作流程,如图2所示。直接横向入位的侧方位停车辅助装置颠覆传统侧方位停车入位方式,属于全新的停车入位方式,如图3所示。
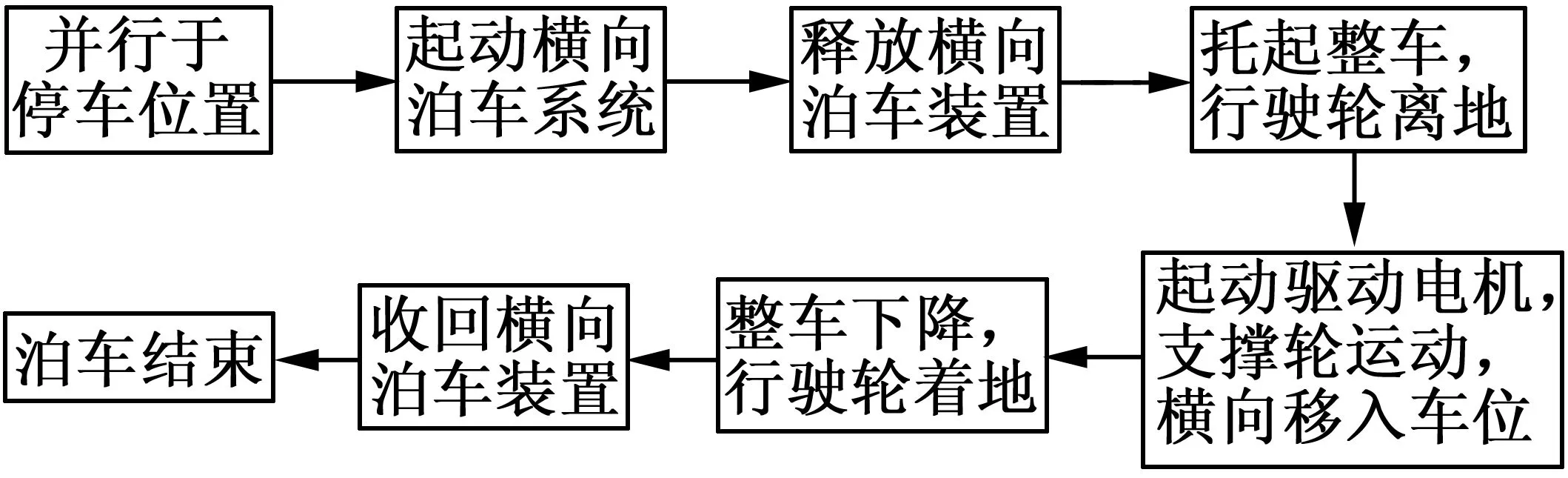
图2 轿车横向泊车装置工作流程图
(a) 横向入位前图
1.3 侧方位停车辅助装置工作原理
遥控发生器设置按钮分别标记为“起动”、 “上升键”、“下降键”、“左移键”、“右移键”、“停止”,遥控器操作示意图,如图4所示。

图4 遥控器操作示意图
电路原理图,如图5所示。蓄电池为侧方位停车辅助装置提供电源,按下遥控器起动键,控制器通电工作;按下遥控器面板下降键,控制器控制水平电动推杆收缩至末端;按下遥控器右移(或左移)键控制支撑轮在驱动旋转电机正(反)向转动,带动汽车整体右移(或左移),移位至用户所需位置时,松开按键,支撑轮和驱动轮毂电机停止工作;按下遥控器面板上升键,控制器控制该装置复位,将垂直电动推杆与支撑轮收至车底与车梁平行且定位,此时水平电动推杆自行停止工作,控制器自动断电。停车入位完成。
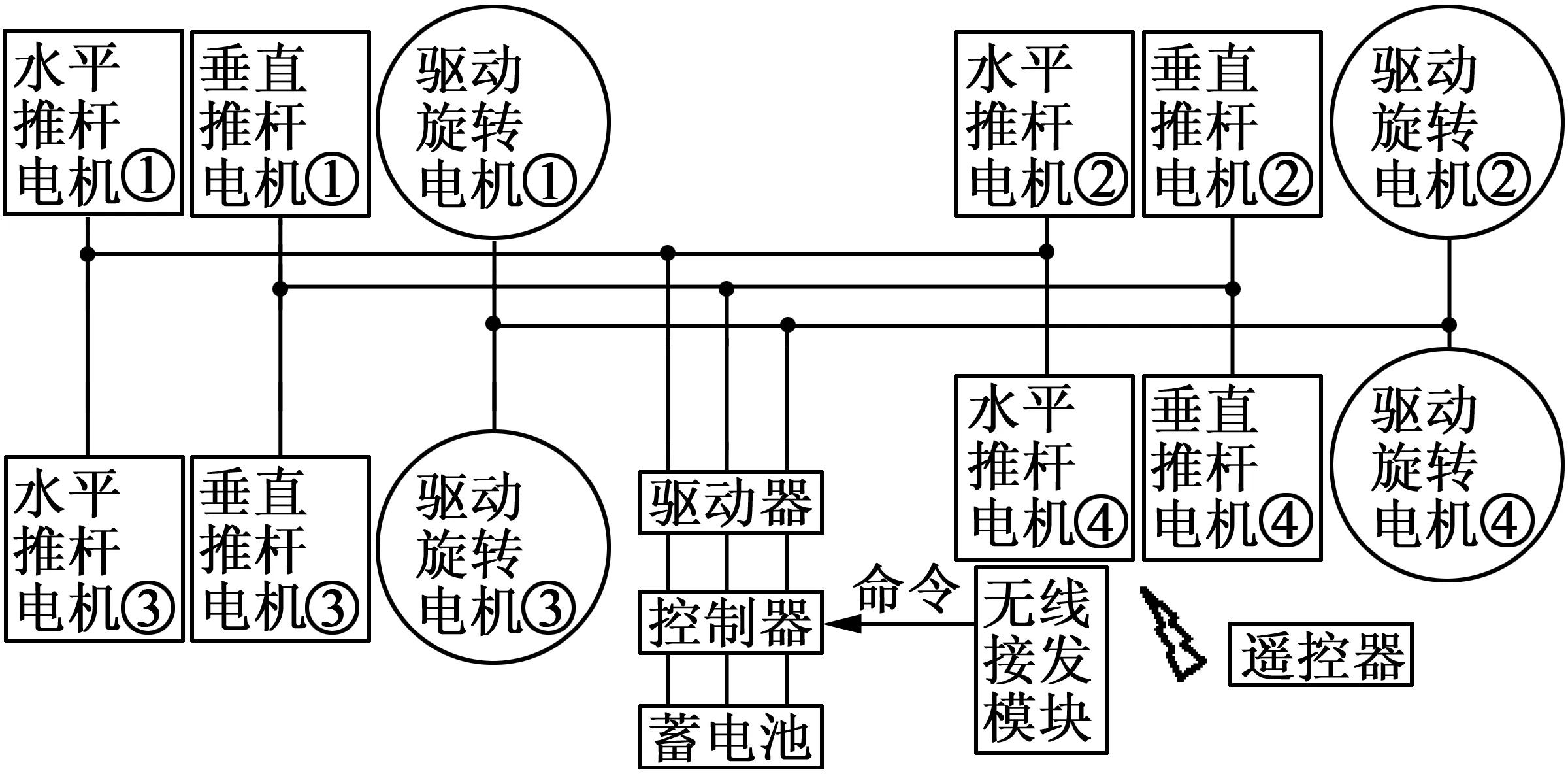
图5 电路原理图
2 主要部件的设计及选型
2.1 升降推杆电机的选择
安装在新能源汽车“比亚迪秦”上,轿车车重m按1.72 t计算:
G=mg=16 856 N
该侧方位停车辅助装置安装在轿车底盘车架最低处,即接近4个悬架处的相关位置点。计算升降推杆装置所需推力:
F=G×1/4=4 214 N
从以上计算数据中,选择了推力DC12V,5kN直线电动推杆示意图,如图6所示。

图6 直线电动推杆示意图
2.2 支撑轮驱动电机的选择
采用无刷直流轮毂电机,无刷直流轮毂电机具有较大的静转矩和良好的调速性能,机械效率高,易于控制,驱动电路简单[4]。
根据轮毂电机所需驱动力与轮毂电机轮胎所受滚动摩擦力f相同(μ=0.02),所选择直流轮毂电机参数计算如下:
f=μmg×1/4=84.3 N
所选择轮毂电机直径D=0.14 m,轮毂电机所需最小转矩:
选择轮毂电机转速设置n=265r/min,该轮毂电机效率η=0.9,故轮毂电机所需最小功率:
因此,选择DC12V,200W的无刷直流轮毂电机。该电机系统如图7所示。

图7 直流无刷轮毂电机系统
3 多电机系统同步控制
3.1 同侧电机控制措施
同步控制系统在并行运行中的优点是系统的同步性能较好,在一定的条件下,不同的单元不受距离的限制。在同步控制系统的同步运行中,系统直接给出各单元的输入信号,各单元的输入信号相同。每个驱动单元的输入信号不受任何其他因素的影响。除参考信号外,任何单元的干扰都不会影响到其他单元的工作状态[4]。通过速度差补偿各电机间的不同惯量,在一定程度上解决了同步协调问题,双电机同步系统耦合控制结构示意图如图8所示。

图8 双电机同步系统耦合控制结构示意图
只有当每个单元的性能与给定的参考信号变化相似,且不会受到任何驱动电机的干扰时,该方案才能实现更好的同步功能,并行同步控制系统如图9所示。然而,若某一个单元电机受到干扰时,系统将会出现不同步,直接影响系统的正常运行[5]。由此,改进控制系统如图10所示。
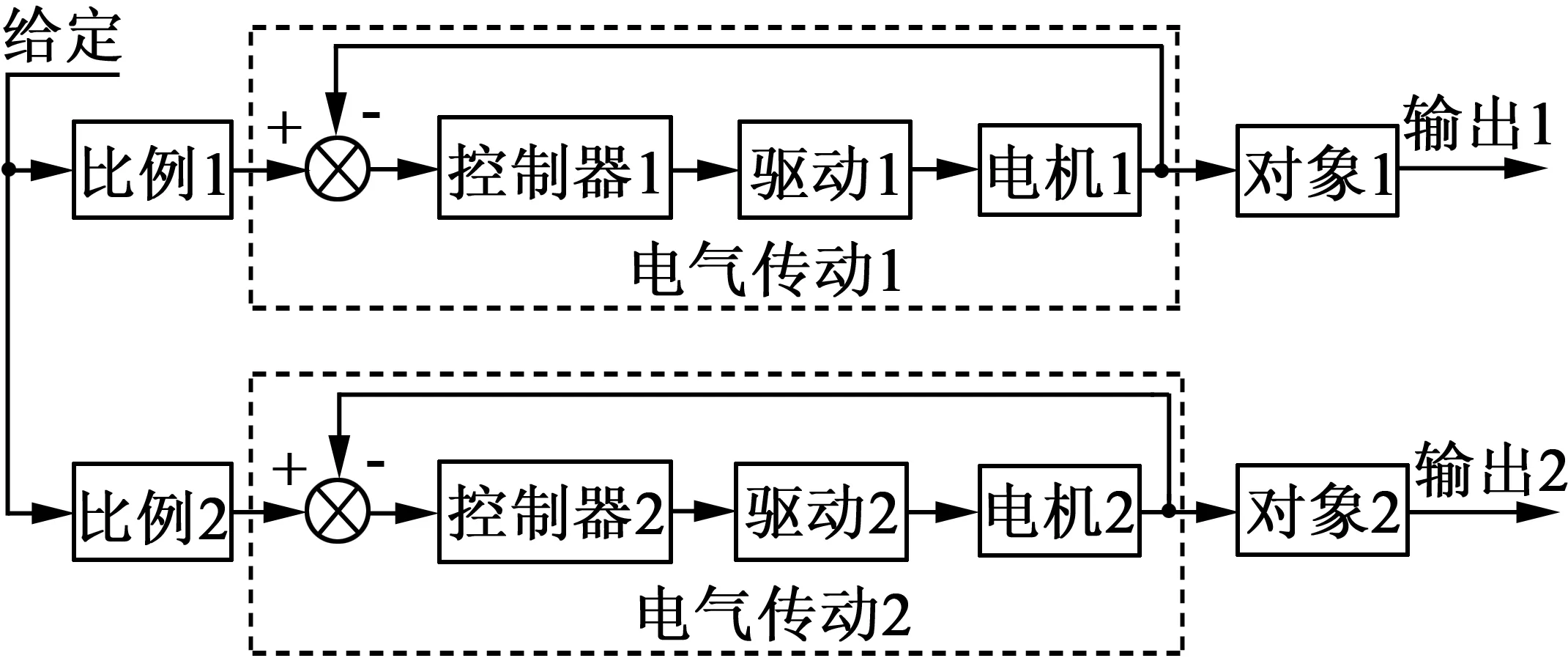
图9 并行同步控制系统

图10 一种改进的耦合控制系统
3.2 多电机数据分析
由于本装置应用中存在着多个电机使用,系统工作中可能会出现不稳定和相互干扰,通过仿真环境设计,采用前述电机模型,建立以多电机同步控制系统的仿真框图[5]。图11为采用模糊控制补偿器的情况下同一侧2台轮毂电机速度响应曲线图。

图11 1#与2#轮毂电机速度响应曲线图
仿真结果表明,采用模糊控制器补偿方法,系统具有较强的同步性和抗干扰能力,适合于同步精度高的控制系统。
对车辆同侧的1#轮毂电机和2#轮毂电机进行实验测量分析,在与地面接触运行中受到滚动阻力,出现轻微速度波动的问题,但不影响2台电机同步运行,仿真数据如表1所示,解决了车辆较高难度侧位停车技术的问题。

表1 仿真数据表
另外,在轮毂电机输出端增设减速机,转速比变为50∶1,解决了稳定准确停车问题。在侧方位停车距离为2m时,预驶入车位,数据保证同一侧的2台电机时间误差在0.1~0.2s,实验数据如表2所示。
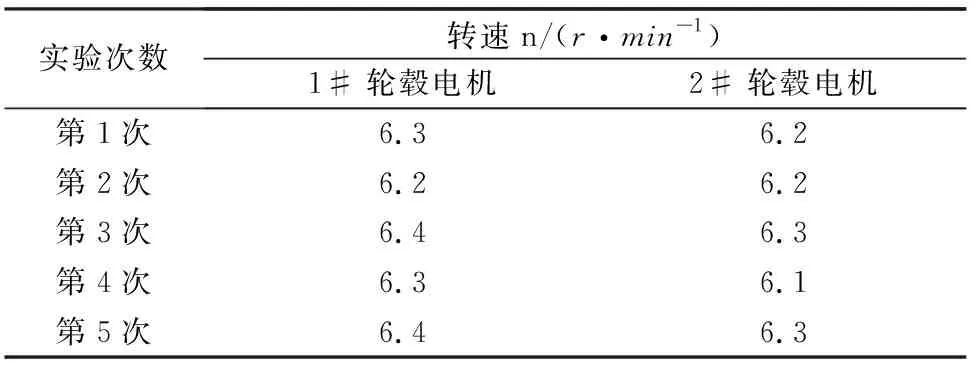
表2 样机实验实测数据表
4 结 语
本文采用电动推杆作为执行元件,配合无线遥控控制,设计出高效侧方位停车辅助装置,并对多电机同步系统控制的稳定性进行了仿真分析,制造出该系统样机,如图12所示。通过综合实验,证明了该装置设计的可操作性。
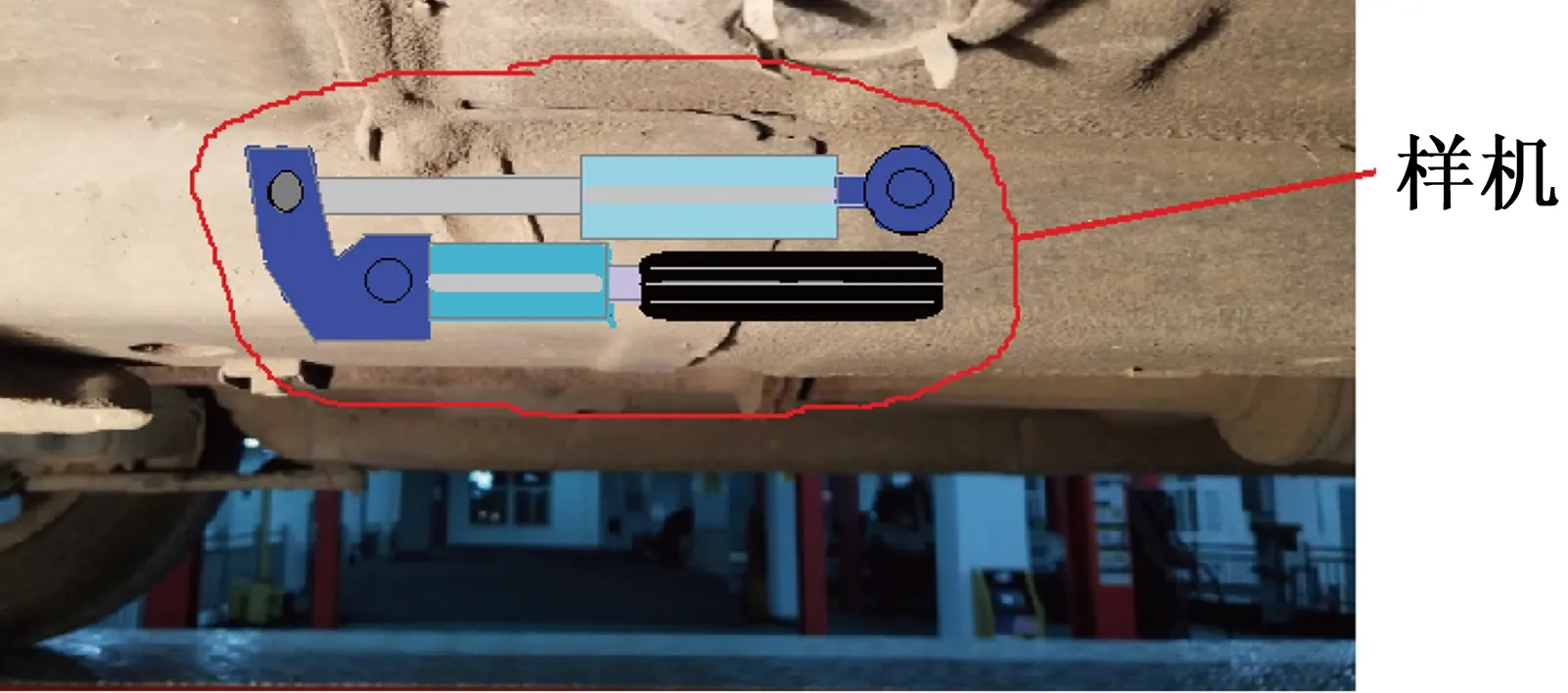
图12 系统样机
综上所述,该装置结构简单,操作方便,性能可靠,使小空间停车更加安全快捷,具有节能环保、车辆面积节省等优点,有助于缓解停车压力。该装置在汽车技术开发领域具有较强的应用价值。
猜你喜欢
宝钢技术(2022年4期)2022-12-23
汽车实用技术(2022年19期)2022-10-19
机械管理开发(2022年5期)2022-07-07
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年5期)2022-04-02
上海涂料(2021年5期)2022-01-15
军民两用技术与产品(2020年3期)2020-04-07
制造技术与机床(2017年10期)2017-11-28
中国核电(2017年1期)2017-05-17
制造业自动化(2017年2期)2017-03-20
