
基于MPPT光伏路灯照明系统光伏充电仿真模型的设计
2018-08-06 08:15张志宏
铜陵职业技术学院学报 2018年2期
张志宏
(铜陵职业技术学院,安徽 铜陵 244000)
太阳能是一种无污染可再生的能源,各国的能源发展战略都大力发展大阳能应用技术。光伏发电是太阳能应用的主要方面,其在路灯照明系统有广泛的应用。其中,太阳能电池板(光伏组件PV)把太阳能转化为电能,是光伏应用系统中的核心部件。因此,对光伏组件的特性研究成为光伏应用系统设计的一个重要环节,其中计算机软件仿真分析是很重要的方法。要实现对光伏路灯照明系统光伏充电的动态仿真,首先一步解决如何对光伏组件I-V特性进行仿真模拟,该模型一旦建立,可用于所研究系统的输入电源[1]。第二步,研究该PV模型的光电转换效率最大化控制的问题。
由于太阳能电池输出特性的非线性特性,使得对其分析十分困难。本文通过使用国际上权威的仿真软件Matlab,利用其Simulink模型模拟实际的电力系统,对电路进行辅助分析,为实际系统设计提供方法依据,可大大简化对本应用电路的设计过程。
1 光伏电池的simulink模型
在应用于路灯照明的光伏充电的独立光伏系统设计中,要分析光伏电池组件的输出特性,研究其输出电压、电流与输出功率的关系才能更好的解决光伏组件光电转换效率的问题。所以在分析时,首先建立PV组件的数学模型,有了各项参数的数学关系,可以反映出它们之间变化规律,也为后续建立Simulink仿真模型做准备。
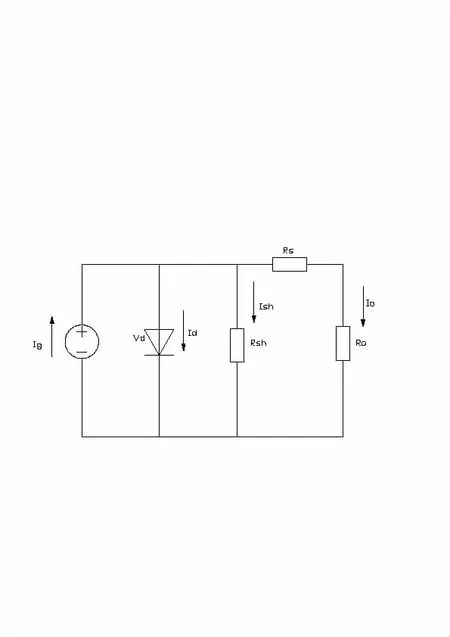
图1:PV等效模型
光伏电池是光伏系统中重要器件,如图1所示,在实际应用中,以光伏组件(PV)形式。内部特性等效看成一个电流源Ig与二极管Vd、等效电阻Rsh、Rs混联组成。其中Ig作用相当于光能转化的内部电流,称为光生电流;电流Id为暗电流;流过旁路电阻Rsh的电流用Ish表示;R0为电池外接负载电阻,Uo为输出电压;输出电流用Io表示[2]。
光伏电池输出功率的函数为:

其方程为一超越方程,求解较复杂,不利于在小型太阳能充电控制系统中实现,一些参数在PV组件厂家所提供的规格书中不包含。所以从工程应用角度,本文提出一种简化的PV组件数学模型。利用Simulink软件工具,在PV组件简化后的参量数学关系的基础上,构建了一种简洁PV组件仿真模型。本仿真模型忽略一些工程上的次要因素影响,参考PV组件厂商提供的产品参数。本实验系统中PV板在参考工作环境S=1000 W/m2,T=25℃测试条件下,提供了4个电气参数,最大功率点电流Im=5.71A、最大功率点电压Vm=17.5V,开路电压Voc=21.5V,短路电流Isc=6.31A。
Simulink作为MATLAB的一个重要组件,给工程系统设计者提供了良好的建模、以及仿真分析的平台。Simulink平台下,PV组件的建模仿真分析有常见的两种方法。其一,利用S函数编程构建PV组件的数学模型,其二,直接利用Matlab/Simulink里的模块搭建,内部功能更直观。本文采用模块直接搭建的方法,根据PV组件的工程简化后数学关系,构建Simulink仿真模型。使用时,将实验中的PV组件参数代入模型,这样建立的仿真模型具有通用性,即不同类型的电池只需改变相应的参数(如图2)。

图2 光伏组件Simulink仿真模型
图3是实际工程中光伏组件为依据仿真模型的P-V特性曲线,在外部环境参数一定时(如温度和光照强度),在某一特定输出电压值时,其输出功率最高,此电压值记为PV组件最大功率点电压Vm。PV组件发电的输出电压高于Vm时,光伏组件的输出功率随着工作电压的增大反而减小;而当光伏电池的工作电压小于Vm时,它的输出功率会随着工作电压的上升反而增大。光伏发电就是要尽量输出电压稳定在最大工作点电压值附近,以获得最大的光电转换效率。
从光伏组件P-V特性曲线可以看出,温度、光照强度影响特性曲线的位置,最大功率点也发生偏移。由于在实际工作环境中,光照强度和温度都是在变化的,工程中的问题就是找到一种较好的控制方法来实现动态的控制光伏电池的输出电压,实现最大功率点的跟踪。

图3 光伏组件的P-V特性曲线
2 基于Buck拓扑结构的MPPT控制

图4 Buck拓扑结构的光伏充电器
2.1 基于Buck拓扑结构DC/DC变换电路工作原理
本系统蓄电池一组充电电压13V左右,太阳能板开路电压达到21.5伏,充电需要降压处理。本文提出的基于Buck拓扑结构的光伏充电器其Simulink模型如图4所示。
Buck电路属于串联型开关变换器, 又称降压变换器,由图4的仿真模型中可以看出,光伏组件PV通过MPPT控制器输出最大功率点工作电压Vre,通过PWM模块调节Buck变换器的占空比α(公式2),使PV阵列始终工作在当前环境下最大功率点上, 并实时检测系统的状态参数, 做出相应的控制[3]。

式中,Ri为DC/DC变化电路的输入电阻,Ro为DC/DC变化电路的输出电阻。对于光伏组件PV来说,Ri也就是其负载电阻。通过调整占空比α,可以调整Ri大小, 利用光伏组件U-I外特性,实现对光伏组件输出电压进行调整,跟踪控制光伏组件的输出电压,使工作状态始终在当前环境的最大功率点处,保证光伏组件最大的光电转换效率。
2.2 基于P&O的MPPT控制方法
从图3 光伏组件的P-V特性曲线可以看出,在不变的温度和光照强度外部环境下,光伏组件可以工作在不同的输出电压下发电,但是只有在某一特定输出电压时,光伏组件的输出功率才能达到最大值。传统的路灯照明系统,只简单采用恒定电压法进行。这种方法在产品设计时,需在程序中设置好充电电压值,使其尽量和所选择的光伏阵列最大功率点电压值接近。但温度或光照强度变化很大时,输出功率会偏离最大功率点很多。而且光伏路灯照明系统的光伏组件选型是随市场变化的,参数不能固定,作为工厂化生产的光伏充电控制器使用时需预设充电压,非常不方便。
本系统把光伏发电用的控制技术——最大功率点跟踪技术(MPPT)应用到光伏路灯照明系统的充电控制中。该技术的主要方法有以下几类:电导增量法、神经网络控制法、扰动观察法等等。都各有优势,但也都存在不足之处。比如:电导增量法的计算较复杂,对采样的精度要求很高;神经网络控制算法复杂,对控制器CPU硬件要求高。扰动观察法计算量小,对控制系统的硬件要求低,但在最大功率点处会产生震荡。为了适应本系统要求和硬件成本控制,采用优化的扰动观察法[4][5]。
扰动观察法P&O(Perturbation and Observation method)是指扰动光伏阵列的输出电压,并根据P=UI计算扰动前后光伏阵列的输出功率,将扰动前后的两个输出功率进行比较的方法。具体来说就是每隔一段时间增加或减少输出电压,通过观测输出功率的变化来决定随后输出电压是增大还是减小。这种控制方法相对其他方法较简单, 利用较低配置的硬件电路即可实现。

图5 基于P&O的MPPT控制子系统
图5是光伏充电器Simulink系统中的一个MPPT控制子系统。第一步是采样PV输出电压、电流,通过零阶保持器模拟实际系统中数据采集时间,把连续信号离散化处理。接着计算功率,及功率变化ΔP和电压变化ΔV,用ΔP×ΔV的正负判断此时功率点的位置,进而确定下一步扰动的方向。如果ΔP×ΔV>0,则表示此时电压值小于最大功率点电压,如果ΔP×ΔV<0,则表示此时电压值大于于最大功率点电压 (参见图4),即simulink系统中sign1为1时,要向负向扰动电压;sign1为-1时,要向正向扰动电子表压。本系统中的扰动步长取Cp=0.001,步长选择较适合,可以在实际硬件控制中实现。
3 仿真结果分析
由于在实际环境中,光照强度和温度都在不停地变化。为了使本设计方法可以应用到实际工作环境中,本仿真系统给PV的光照参数设置成时间变化的参量,在仿真时选取极端情况,每隔0.4秒,光照强度骤变一次,分别是1000W/m2,800W/m2,1200W/m2,温度取25℃时,输出功率变化曲线(如图6所示)。

图6 PV输出功率变化曲线(25℃)
从功率曲线图中可以看出,基于Buck拓扑结构的MPPT控制方法,可以适应工作环境变化的情况,较迅速的实现光伏最大功率点充电,且振荡在工程许可范围内,验证了此方案的正确性。
4 结语
针对光伏组件的特点,本文简化的传统PV组件的数学模型,以便适应光伏路灯工程应用中的实际需要。在Matlab/Simulink平台环境,构建了完整的光伏MPPT充电的模型,进行仿真实验。研究结果证明,在应对外部工作环境突变情况时,表现出满意的最大功率跟踪性能。
猜你喜欢
太阳能(2022年2期)2022-03-07
北京航空航天大学学报(2021年7期)2021-08-13
中国惯性技术学报(2019年3期)2019-10-15
自动化学报(2019年6期)2019-07-23
中国惯性技术学报(2019年6期)2019-03-04
小学阅读指南·低年级版(2017年11期)2017-12-06
小学阅读指南·低年级版(2016年1期)2016-09-10
军民两用技术与产品(2016年3期)2016-01-05
