基于光量子态避错及容错传输的量子通信∗
2018-08-02 05:46邓富国李熙涵李涛3
物理学报 2018年13期
邓富国 李熙涵 李涛3)
1)(北京师范大学物理学系,北京 100875)
2)(重庆大学物理系 重庆 400044)
3)(南京理工大学理学院,南京 210094)
量子通信以量子态为信息载体在远距离的通信各方之间传递信息,因此量子态的传输和远距离共享是量子通信的首要步骤.信道噪声不仅会影响通信效率还可能被窃听者利用从而威胁通信安全,对抗信道噪声是实现安全高效量子通信亟需解决的问题.本文介绍基于光量子态的两类对抗信道噪声的实用方法——量子态的避错传输和容错的量子通信,包括对抗噪声的基本原理和两种方法的代表性方案,并从资源消耗和可操作性的角度分析了方案的实用价值.
1 引言
量子通信 (quantum communication)利用量子态加载信息,借助量子力学的基本原理保障通信安全,是近30年发展起来的一门新型交叉学科,是量子信息处理的两个主要研究方向之一.自第一个量子密钥分配方案于1984年提出以来[1],量子通信在理论和实验上都取得了重要发展.理论上,量子通信根据不同通信情境的需要衍生出不同的分支,如量子密钥分配(quantum key distribution,QKD)[1−7],量子机密共享(quantum secret sharing,QSS)[8−10]、量子安全直接通信(quantum secure direct communication,QSDC)[11−17],量子隐形传态(quantum teleportation)[18−20],量子密集编码(Quantum Dense Coding)等[21,22].经过30年的发展历程,每一个分支都涌现出一批优秀的理论方案.实验上,量子态制备和量子通信的距离不断刷新纪录,部分产品已经开始商用[23].相较于量子信息处理另一个重要的研究方向——量子计算[24−51],量子通信将更早地全面进入人类生活,提供绝对安全的机密通信方式.
一般而言,量子通信方案包含四个主要的部分,即量子态的制备、传输、操控和测量,通信中用于携带信息的物理实体也从以上四个方面被考量.经过30年的实验探索,光子由于其传输快速、容易操控和测量、与环境耦合较弱等优点被认为是理想的信息载体,已有的大量量子通信实验采用光子的极化(偏振)或相位自由度加载信息.实际上,光子有众多自由度可用于加载量子信息[44−64],但目前光子的极化自由度相较于其他自由度(相位、路径、时间、频率、轨道角动量)在操控和测量方面的技术更成熟,是最常用的量子信息载体.
早期的理论研究侧重于物理模型的构建,主要基于理想状态下的物理原理设计通信模型.随着实验技术的不断提高,实验中存在的问题逐渐浮现——量子态的制备和探测效率低、操作和传输过程中存在损耗等.其中,光子的偏振自由度在传输过程中会受到热涨落、介质的不均匀性以及光纤双折射现象的影响.这些影响不仅会降低量子态的保真度从而影响通信效率,而且可能被窃听者利用从而威胁量子通信的安全.因此量子态的保真传输和共享是实现安全量子通信的先决条件,是量子通信实用化进程中亟需解决的关键问题之一.
通常,我们将可能对量子系统造成扰动的外界因素统称为噪声.噪声造成量子态出错(error).为减少或消除错误,人们提出了一些有效的对抗噪声的方法.处理噪声影响的一般思路是:首先需要确定出错位置,发现错误;随后采取相应的操作,即对于不能纠正或不易纠正的错误采用避免错误的方式抛弃出错样本,对于可以纠正的错误进行纠正修复.此外还有一类方法可以通过设计使错误自动抵消,实现容错的通信过程.
我们可以根据在传输过程中采取措施阶段的不同将现有的抗噪方法加以分类.第一类方法称为反馈控制 (feedback-control),即实时监控噪声的影响然后进行主动补偿.这种方法是在“传输中”采取措施,但是它需要中断传输,而且对随时间变化太快的噪声并不适用.第二类方法是在“传输后”采取措施,如纠缠浓缩 (entanglement concentration)[65−89]和渐进式的纠缠纯化 (entanglement purification)[90−110].对于传输后已被噪声污染的量子态样本,纠缠浓缩方法可概率地得到期望的量子态;渐进式的纠缠纯化可通过牺牲一部分样本的方法提高剩余样本的保真度(纯度),并利用不断迭代的方式得到安全量子通信要求的量子态.这两种方法均需要光子之间的相互作用,成功率和效率都会受到噪声强度的影响,对资源的消耗也较大.虽然它们给出了对抗噪声的有效理论思路,但在实验上特别是现有的实验条件下还存在困难.
第三类方法是在“传输前”采取措施,如确定的纠缠纯化(deterministic entanglement purification)[111−115],量子纠错码 (quantum error correction,QEC)[24],量子态的避错传输(quantum error rejection,QER)[116−119]和容错的量子通信 (fault tolerant quantum communication)等[6,7].它们首先对环境噪声建立模型,然后根据噪声的具体形式设计出合适的方案来削弱或消除噪声的影响.量子纠错码借用经典纠错码中冗余编码的思想,用多个物理比特编码一个逻辑比特,传输完成后通过对稳定元的测量发现错误并纠正.由于量子纠错码基于“少数服从多数”的指错原则,因此主要适用于多个物理比特同时出错概率极小的情况.当多个物理比特同时出错时,错误便不能被消除.且该方法对量子操作的要求较高,一般不适用于量子通信.确定的纠缠纯化利用光子较稳定的自由度作为辅助在传输过程中携带信息,避免噪声的影响.这类方案理论上可以得到保真度为1的量子态,非常适用于纠缠态的远距离共享(特别是构建量子中继器),但对基于单光子态的量子通信不适用.容错的量子通信利用由多粒子系统构建的退相干无关子空间(decoherence free subspace,DFS)在特定的噪声条件下不受噪声影响的特点,排除了噪声的影响.其本质是各个粒子之间已有的纠缠关系将噪声作用抵消从而表现出不受影响的特性.这类方法虽然需要多个粒子编码一个逻辑比特,但是完全容错的特性使其在量子通信中具有很好的实用价值.量子态的避错传输一方面遵循发现错误避免错误的基本思路,另一方面借用退相干无关子空间中抵消错误的思想.这类方法通常针对任意单光子量子态设计,同样适用于纠缠态.它们对实验技术条件的要求较低,最终可以概率地得到保真度为1的量子态,在量子通信中有非常好的应用前景.
上述在传输前采取措施的抗噪方法均需要对实际信道噪声建立数学模型.为了方便讨论,信道噪声被简化成为一个随时间变化的幺正算符U(t)[6].由于环境条件的变化,噪声算符随时间变化.虽然不同的物理实体在不同环境条件下噪声的具体形式不同,但通常情况下噪声在一定时间尺度上是缓变的——同时或时间间隔很短的几个光子或波包在同一噪声信道中传输时受到的影响相同.这一假设称为联合噪声(collective noise)假设[120].这时噪声对n个光子构成的量子系统的作用可描述为

这里U(t)†是U(t)的厄米共轭算符.一些对抗噪声的实验已经验证联合噪声假设可以描述噪声的一般作用规律,现有的大部分抗噪方案也都是基于联合噪声假设展开的.
总体而言,要对抗信道噪声的影响必然需要借助额外的量子资源.本文主要从资源消耗和可操作性两个方面考量抗噪方案的实用价值,介绍基于光量子态的避错和容错的典型方案,让读者对该领域的基本原理和主要成果有一定的了解.在以下的两个部分中,我们先介绍两个方向中最具代表性的方案,随后对该方向的发展历程和现状进行综述,对比不同方案的优缺点并展望该方向的发展前景.
2 量子态避错传输
2.1 光量子态自避错传输方案
量子态的避错传输一般针对单光子任意量子态设计,考虑联合幺正噪声的影响,将光子态拆分后传入噪声信道,传输完成后合并抵消部分噪声作用,从而有一定概率得到保真度为1的量子态.目前为止,最具实用价值的方案是2007年Li等[116]和Deng等[117]提出的仅需被动式线性光学元件的光量子态自避错传输方案及其改进方案.自避错传输方案的基本原理如图1所示.
假设待传输的单光子任意量子态可表示为


图1 单光子自避错传输方案原理图Fig.1.Schematic demonstration of single-photon error rejection scheme.
在编码装置的作用下,量子态的演化过程描述为
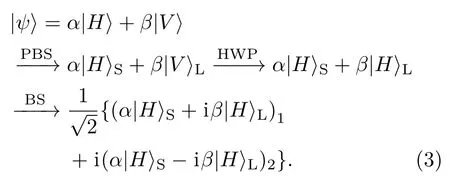
(3)式中的虚数“i”来自BS反射时的相位突变.由于两个噪声信道上的情况类似,以下仅以信道1为例加以说明.下标L和S代表两个不同的时间态.前后两个时间上波包的极化状态均为,将受到完全相同的噪声影响.任意噪声的作用表示为
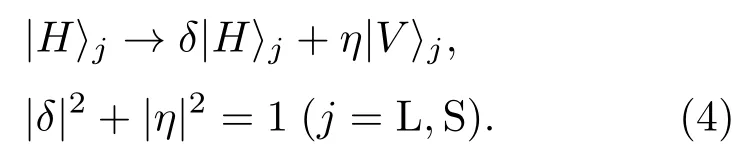
δ和η为噪声系数,取决于信道.在噪声的作用下,信道1中的量子态变为

接收者Bob的解码装置与Alice的装置的元件一样但顺序相反,UI长短臂的长度差设定为相同值,其作用如下:

下标a,b代表Bob处PBS的两个出口.由(6)式可以看出,下划线的部分“SL”或“LS”代表经历长臂和短臂各一次,同时到达,且这两部分可以在幺正操作的帮助下恢复为原态.而“SS(LL)”代表两次经历短(长)臂,过早(晚)到达,可以用时间挑选的办法将这两部分排除.因此保留下来的量子态恢复为原态的成功率为1/4.考虑到信道2的情况,整个方案的成功率为50%.
这个单光子避错传输方案非常简单,利用时间上不同的两个部分经历相同的噪声后相互抵消部分噪声,通过时间挑选获得期望的量子态.方案仅使用线性光学元件,不需纠缠,不需要辅助粒子,不需主动控制,是一个在现有技术条件下非常实用的避错传输方案,适用于所有的单向量子通信.它不仅可以用于传输单光子任意纯态,还可以用于传输与其他粒子处于纠缠的混合态,有非常好的应用前景.特别值得一提的是,方案的成功率与噪声信道无关.无论噪声强弱均可达到相同的成功概率.
2.2 高效的光量子态自避错传输方案
光量子态自避错传输方案的不足之处在于使用了两个信道传输且为获得100%保真度的量子态而牺牲了一半的成功率.这是由于利用时间自由度进行挑选,而时间自由度并不像极化自由度那样容易操控.为了弥补这一不足,Deng等[117]随后提出了一个改进方案将极限情况下的成功率提高到(2N+1−1)/2N+1,且只需一个信道传输,N代表Bob解码装置中增加的不等臂干涉仪的数目.为了简单说明改进方案的原理,下面以N=1为例加以说明,其原理如图2所示.

图2 高效的单光子自避错传输方案原理图(N=1)Fig.2.Schematic demonstration of the efficient single-photon error rejection protocol(N=1).
这里Alice引入另一个不等臂干涉仪将本来应由信道2传输的量子态导回噪声信道1,且这两个波包与信道1原来传输的波包的时间间隔(即第二个不等臂干涉仪的长短臂差)取为∆T=∆t/2.这时进入噪声信道的量子态表示为

四个波包两两一组,根据其极化状态可分别称为H组和V组.组内波包时间间隔为∆t,组间时间间隔为∆T.两组波包的解码过程类似,以下仅以H组为例加以说明.信道噪声对不同偏振态的作用不同,表示如下:噪声作用后的H组波包变为



下标∆t代表被延迟的时间.Bob的解码装置中新增了一个长短臂差为2∆t的UI,它将H组的两个波包分为四个,相邻波包的时间间隔均为∆t. 波包劈裂没有调节光子的极化状态,因此系数为δ1的部分一定会由解码装置的b口出射,而系数为η1的部分一定会由解码装置的a口出射,两部分的量子态只相差一个操作. 经过UI和解码装置的作用,量子态演化为


由(11)式可以看出,下划线部分的量子态与原态只相差一个幺正操作,它们将分别于∆t,2∆t,3∆t三个时刻到达.因此可以根据量子态到达的时刻选择相应的幺正操作恢复原未知态.V组的情况与H组类似,整个方案的成功率为3/4,同样与噪声系数完全无关.在这个方案中由于将波包数目翻倍,增加了有效事件发生的概率,大大提高了方案的成功率.通过类似的方法引入更多的不等臂干涉仪把波包劈裂更多份,可进一步提高恢复原态的成功率,图3所示为推广的接收者的解码装置.

图3 改进的接收者解码装置Fig.3.Schematic demonstration of the improved decoder.
该装置引入N个不等臂干涉仪用于波包劈裂,第N个干涉仪的长短臂差为2N∆t.这样态的两个波包将被分为2N+1个,相邻波包的时间间隔为∆t.长短臂差为∆t的解码装置使波包数目翻倍,原量子态将塌缩到2N+1+1个响应时刻.其中有用的响应事件有2N+1−1个,因此方案的成功率为(2N+1−1)/2N+1.最后得到的量子态可写为

2.3 主动调制的光量子态避错传输方案
除了使用被动式线性元件的方案外,2005年,Kalamidas[118]曾基于主动调节元件普克尔盒(Pockels cells,PC)提出过两个噪声条件下的量子态传输方案.第一个方案的原理如图4所示,Alice的编码装置由不等臂干涉仪和普克尔盒PCA构成.PC是一种高电压控制的偏振态调节装置,它能调节特定时刻通过的光子的偏振状态.Alice调节PCA使其只对后一个时刻到达的波包进行偏振态翻转操作,即
在编码装置的作用下,单光子任意未知态变为

噪声对量子态的作用可以用一个普适的幺正操作算符U来描述


图4 主动调节的单光子避错传输示意图Fig.4.Schematic demonstration of single-photon error rejection based on the active modulator.
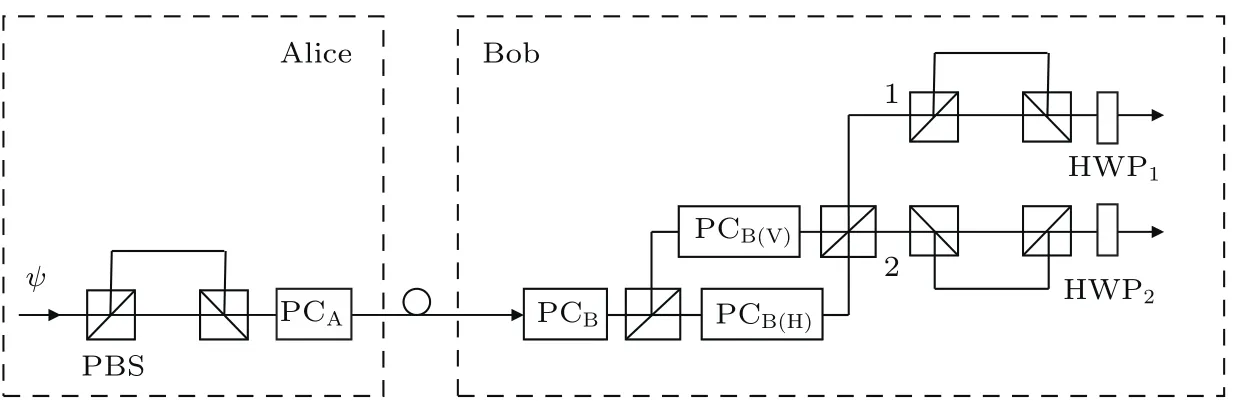
图5 改进的主动调节的单光子避错传输示意图Fig.5.Schematic demonstration of improved single-photon error rejection based on the active modulator.
前后两个波包的时间间隔一般调节为纳秒量级,满足联合噪声假设.这样经过噪声作用后进入Bob解码装置的量子态为

Bob的解码装置由PCB、不等臂干涉仪和半波片构成.这里PCB的作用是对前一个时刻到达的波包进行偏振态翻转操作,即Bob的不等臂干涉仪与Alice的完全一致,即双方在传输之前事先校准了两干涉仪的长短臂差,使两长臂对波包造成的延迟完全相同.半波片的作用为对偏振态进行比特翻转操作.在解码装置中一系列光学器件的作用下,的演化过程为

可以看到最后一行的第一项与原未知态形式完全一致,且两部分同时到达,方案的成功率为cos2θ,取决于噪声系数的大小.当θ足够小时,方案的成功率趋近于1,通过对噪声参数θ取随机平均可以得到平均成功率为1/2.
第二个方案的原理如图5所示,作者通过对Bob解码装置的改进将方案升级为具有纠错功能的量子态传输方案.接收者引入两个新的PC,PCB(H)只对前一时刻(S)经过的态进行翻转,PCB(V)只对后一时刻(L)经过的态进行翻转,具体演化形式与结果如下

上标1和2表示Bob的两个接收端.由(17)式可见Bob总是能在确定的时刻得到未受到噪声影响的量子态.两个出口1,2得到原态的概率分别为cos2θ和sin2θ,方案的总成功率为100%.可以将出口1看作避错模式,出口2看作纠错模式.这个方案是一个自纠错的传输方案,作者通过巧妙的设计使得最后得到的量子态自行抵消了噪声引起的错误.不过这个方案中PC不仅要对选定的时间进行操作,还要区分不同的偏振状态进行操作,增加了实验的复杂度.
上述的两个方案都是单光子自避错传输方案,仅需线性光学元件,在噪声信道中实现了任意单光子量子态的保真传输.方案不仅适用于单光子纯态,同样适用于混合态[122],具有广泛的应用前景.第一个主动式方案的不足在于成功率受噪声系数的影响,两个方案中用到的普克尔盒PC需要高电压控制,对时间操作的精确度要求很高,在目前的实验条件下实现存在一定困难,这将大大限制它们在实际量子通信中的应用.
2.4 其他避错传输方案及其应用
除了劈分光子实现自避错的方法外,研究者们还提出过很多在噪声条件下实现单光子任意态保真传输的方案.2005年,Yamamoto等[119]提出了借助处于的辅助光子的单光子避错传输方案.方案中辅助光子与任意单光子态先后经相同的装置导入噪声信道,经历相同的噪声作用,随后通过对两个光子进行宇称检测排除出错的事件,从而可得到保真度为1的量子态.该方案的优点在于不需利用纠缠,只需线性光学元件,但方案的成功率较低且与噪声参数有关,在光子数探测器和两比特门的辅助下成功率仅为1/8,与前面提到的单光子自避错方案[116,117]相比在可操作性和成功率上完全没有优势.该课题组随后对方案进行了实验验证[123]并将方案推广用于传输处于纠缠态的一个粒子以实现远距离保真的纠缠分发[124].此后他们用弱相干脉冲(weak coherent light pulse,WCP)替代辅助单光子,并将辅助相干光与信号粒子同时且反向传输,将基于两粒子方案的成功率由原来的O(T2)提高到了O(T)(T为单光子在噪声信道中的传输率)[125,126].2009年,Li等[127]同样借助处于固定状态的辅助粒子并利用频率自由度提出了量子态的避错传输方案,理论成功率可达1/2.此外也有利用纠缠辅助的任意量子态传输方案[128,129]以及利用两粒子编码实现的避错量子密钥分配方案[130].从实用性的角度比较,基于被动式线性光学元件的单光子自避错的量子态传输方案[116,117]无论从资源消耗还是可操作性角度都具有较显著的优势.
量子态的避错传输方案不仅适用于单粒子纯态,还可以用于传输处于纠缠的单粒子混合态.前面介绍的方案均可以直接用于在远距离通信方之间建立纠缠,即纠缠分发 (entanglement distribution).此外还有一些特别为分发纠缠态设计的方案,它们大多引入辅助的自由度协助完成光子极化自由度的远距离分发,使通信各方以100%的成功率共享高保真的纠缠态[131−136].
3 容错量子通信方案
3.1 高效容错量子通信方案
前面已经提到,要对抗信道噪声,必然需要消耗额外的资源.而纠缠就是一种实用的资源.虽然纠缠态相较于单光子态更难获得,但随着实验技术的不断发展,目前制备两粒子纠缠态的技术已经比较成熟,两粒子最大纠缠态也被广泛应用于量子通信的各个分支领域,它们同样可以用于对抗环境噪声,构建容错的DFS.由于篇幅有限,本文只介绍完全容错的量子通信方案.
2008年,Li等[7]基于两粒子贝尔(Bell)态提出了两个分别对抗不同类型联合噪声的高效量子密钥分配方案.为方便后续讨论,本文中将这两个方案称为FTQKD2008方案.
第一个方案为对抗联合退相位噪声(collective dephasing noise)的QKD方案.联合退相位噪声的作用形式为

其中φ为信道噪声的参数,随时间缓慢变化.在此种形式的噪声下可选取两个反平行的贝尔态作为逻辑比特构建退相干无关的子空间.这样构成量子态的两项在噪声信道下均会引入eiφ的相位,从而变成全局相位对系统没有影响.

这两个贝尔态相互正交,由于一般量子密钥分配方案总是需要两组不正交的基矢编码信息才能保证通信的安全性,作者将纠缠粒子对两两编为一组并引入空间自由度来构建两组不正交的基矢,如图6所示.

图6 空间自由度示意图Fig.6.Schematics of the two spatial bases.
这里空间自由度指的是四个粒子的相对位置,两种不同的排列顺序分别构成相邻基和交叉基量子态的具体形式如下:

式中下标数字表示四个粒子在信道中的传输顺序,它们之间的时间间隔为∆t.为满足联合噪声假设,要求3∆t小于噪声的涨落时间从而保证四个粒子在传输过程中受到噪声的影响一致.上述四组态在单光子X方向基矢下展开为如下形式:

其中

不难验证两组基矢内部正交,相互平分.而a,b,c,d四态相互正交,接收者Bob可通过X方向的单粒子测量来区分一组基矢内的两个量子态.
在密钥分配过程中,发送者Alice随机选择两组空间基矢制备n+2δ个代表0,1密钥的四粒子量子态,随后经噪声信道发送给Bob.由于选择了DFS编码信息,量子态在噪声作用下保持不变.Bob对接收到的量子态做单粒子直积测量.其中随机抽取2δ的样本作为安全性检测样本,对一半样本做方向的直积测量,对另一半做X方向的直积测量.剩下的n个样本用于产生密钥,都做X方向的单粒子直积测量并记录下所有的测量结果,如a,b,c,d.双方先用检测样本比对出错率.如果出错率在某一可接受的范围内,双方继续下一步;否则,双方中断通信,从第一步重新开始.当通信双方确认了信道安全后,Alice通过经典信道将空间基矢告知Bob.Bob可根据基矢以及单粒子测量的结果推算出密钥,将这一部分密钥作为裸码.经过纠错和机密放大等操作后,双方可建立起一组用于加密信息的安全密钥.
第二个容错方案是对抗联合幺正旋转噪声(collective unitary rotation noise)的量子密钥分配方案,这种噪声的作用形式为:

其中θ是噪声参数,它随时间缓慢变化.对于这种形式的噪声,可选择贝尔态作为基本单元来构造DFS.其中. 这两个态在联合旋转噪声的作用下都保持不变.类似于对抗联合退相位噪声的情况,这里也将纠缠粒子对两两编为一组

其中
在这两个量子密钥分配方案的通信过程中,除了用于安全性检测的样本外,其余样本全部用于产生密钥,不存在由于选错基矢造成样本的损失,很大程度上提高了通信效率.并且Bob除了在安全性检测中需做少量的Z(X)方向测量外,其余大量测量都是X(Z)方向的.也就是说,接收者测量时不需随机变换基矢.此外虽然传输信息用的是多粒子纠缠态,但接收者不需做联合贝尔基测量,只需做单粒子测量,大大降低了接收者的操作难度.作为一个量子密钥分配方案,窃听者采取不同攻击手段的最低出错率为12.5%,可保证通信安全.特别值得一提的是,常见的QKD模型中,两组不正交基矢的使用会导致一半的样本由于双方选择了不同的基矢而被抛弃,或者需要引入量子存储技术才能避免传输的样本浪费.而上述方案不需存储就能避免由于选错基矢造成的损失.因此虽然方案需要四个粒子编码一个逻辑比特,但它们作为对抗噪声的量子通信方案效率并不低.
3.2 同时对抗联合旋转噪声与联合相位噪声的量子通信方案
在高效容错量子通信方案[7]提出之前,Boileau等[6]于2004年也曾提出了两个利用两粒子最大纠缠态对抗联合旋转噪声的量子密钥分配模型.第一个方案用四粒子态编码1个量子比特,第二个用三粒子态编码为1个量子比特.方案中用到的基本单元为自旋单态作者利用空间自由度将两对纠缠粒子对进行了如下三种组合:

这里

自旋单态在任意旋转噪声下保持不变,因此(46)—(48)式中的0和1可以看作单粒子空间的任意一组正交基矢.三个编码态相互平分因此接收者并不能通过单粒子直积测量直接区分以上三个量子态,测量结果只能提供部分信息.而两两之间相互正交,可以通过单粒子直积测量准确地区分它们.如果Alice每次从两个态中选一个发送,Bob就有一半的机会推测出原态.例如,Alice发送当Bob测量得到中的项时,就可以区分这两个态,即表示原态是表示原态为但如果测量结果是中的项时,Bob 就不能区分原态.因此在通讯过程中Alice需事先随机选取一串(4+δ)n比特的密钥序列X和一串长度为(4+δ)n位的三能级基矢序列B.B序列的值决定用于编码的量子态:当B=j(j=0,1,2)时,Alice根据X比特的值{0,1}制备态随后Alice将这(4+δ)n组量子态发送给Bob;Bob收到量子态后随机选择X方向或者Z方向做单粒子直积测量,并记录测量结果;Alice公布基矢序列B,Bob根据这一信息可以判断自己的测量结果能否推断初态信息获得密钥,双方抛弃所有测量结果无效的样本,剩下的样本用于产生密钥.
此方案可以同时对抗两种联合噪声,具有更广泛的适用范围.接收者也只需做单粒子测量,实验上容易实现.只是量子比特的利用率不高,一半的测量结果不能用于生成密钥.随后,Zhang[137]利用同样的三个量子态提出了一个噪声信道下的多方机密共享方案,除了信息的发送方和最后一个测量者外,其余的参与者都采用对调粒子顺序的操作加载自己的控制信息.
考虑到多粒子方案对于信道损耗的敏感性,作者还提出了一个三粒子方案,只需对上述方案做少许改进.Alice随机抛弃其中一个粒子,将剩下的三个粒子发送给Bob.被抛弃粒子的位置信息将同基矢信息一同公布.这样原来的三个四粒子纯态变为三个三粒子混合态.这三个混合态在任意旋转噪声下同样保持不变.


接收者Bob同样做任意方向的单粒子直积测量.由于只用到三个粒子编码,方案对信道丢失的敏感度降低,制备初态时也只需制备一对纠缠粒子对,节省了资源.
3.3 容错量子通信方案应用
我们看到,利用DFS编码信息是一种非常有效的对抗噪声的方法,它自动容错的特点备受青睐.近年来研究者们以文献[7]中提出的容错基矢为基本单元针对特定的联合噪声将容错通信在量子通信的不同领域进行推广,如容错的量子密钥分配[138−142],容错的确定密钥分配[143−150],容错的量子机密共享[151,152]、容错量子直接通信[153−157]和容错量子对话等[158,159].
2009年,Dong等[145]提出了一个对抗联合退相位噪声的确定安全量子通信方案.该方案借用文献[6]中将四粒子方案简化为三粒子方案的思想改进了Li等的第二个对抗联合退相位噪声的容错方案. 他们利用在联合退相位噪声下保持不变的和单光子态构成编码的基本单元,引入空间位置构建了两组不正交的基矢这里下标1,2,3代表三个粒子在噪声信道中传输的顺序,即空间排列的位置.在此方案中,接收者只需做三个X方向的单粒子测量,借助发送者的基矢信息就能读取由量子态编码的信息,量子态利用率为100%.同年,该课题组进一步推广了基于空间基矢的量子密钥分配方案[7],基于三个Einstein-Podolsky-Rosen(EPR)对提出了两个分别对抗前述两种联合噪声的量子密钥分配方案[140].方案针对不同的噪声选择相应的EPR对作为构建容错基矢的单元,引入两种空间排列模式{[12][34][56]}和{[61][23][45]},数字代表不同位置的粒子,方括号代表这两个粒子处于纠缠)构建两组不正交的基矢以保障通信安全,通过传输三个EPR对可交换两比特的经典信息.2014年,Lin等[141]将这类容错方法进一步推广,同样引入两种不同的空间排列{[12][34]…[2n−1,2n]}和{[2n,1][23]…[2n−2,2n−1]}构建了两组不正交的基矢,提出了传递2n个贝尔态可交换n−1比特信息的容错量子密钥分配方案.这些方案均延续了FTQKD2008方案的特点,接收者只需进行单光子测量而不需联合测量,且除安全性检测外只需进行一个方向的测量,不会由于选错测量基矢造成样本浪费,具有非常好的实用价值.
除了容错的量子密钥分配方案外,2009年,Gu等[151]提出了分别对抗联合退相位噪声和联合旋转噪声的容错量子机密共享方案.方案利用逻辑比特的纠缠态对抗噪声,每一个逻辑比特由两个物理比特编码,相当于使用四个物理比特纠缠态作为纠缠信道.不过测量时只需做两个物理比特的贝尔基测量而不需要四粒子联合测量.整个方案完全容错,可共享2比特的密钥.由于使用双向通信,此方案的效率与FTQKD2008相当.2011年,Li和Li[152]也基于相同的逻辑比特单元提出了两个容错的QSS方案,不同之处在于她们选择逻辑比特的单比特态作为信息载体,测量时只需进行物理比特的单粒子测量,降低了实验难度.此外,2011年,Gu等[153]基于量子一次一密的原理提出了两个容错的量子直接通信方案.同年,Yang等[154]基于两步量子直接通信方案[12]的原理也提出了两个容错的QSDC方案.这两个方案可算是经典的容错量子直接通信方案.一般来说,容错方案的设计思路为根据噪声形式选择合适的退相干无关量子态构建容错基矢作为逻辑比特,将已有的理想条件下的量子通信方案中物理比特用容错的逻辑比特代替,然后需要重新考虑方案安全性检测、量子态调控以及测量读取信息等细节问题.
在一些容错方案中,研究选择以对相应噪声保持不变的物理比特的贝尔态作为逻辑比特,并利用逻辑比特纠缠态作为量子信道,这相当于用物理比特的三粒子或四粒子Greenbergen-Home-Zeilinger纠缠态作为量子信道.这类方案[138,142,147,148,150,151,154,156,157,159]一般都需要接收者做物理比特的联合贝尔基测量才能读取信息,在现有的实验条件下还存在困难.而采用两个物理比特编码的逻辑比特作为信息载体的方案一般都只需单粒子测量,这类方案[139,143,146,149,152,153,155]看上去相较于使用四个物理比特的FTQKD2008方案更具优势.然而实际上,由于安全的量子通信需要两组不正交的基矢,不同于FTQKD2008中引入空间模式的方法,这些方案选择采用逻辑比特的叠加基矢作为第二组基矢. 因此会出现类似于经典的BB84方案的情况——由于缺乏基矢信息,接收者随机选择测量基将造成一半的测量结果被抛弃,从而降低信息传递效率[146].而要解决这一问题,要么需大概率地选择某一个基矢作为主要的信息携带基矢[152],要么需要只选择一个基矢加载信息但是重排粒子顺序[149],这些都需要在通信过程中引入量子态的存储或延迟来实现.更多的方案选择采取双向传输的办法避免随机测量造成的浪费[139,143,153,155],即由量子态的制备者做测量,发送者的信息用幺正操作编码.而这相当于两个物理比特在信道中传输两次实现1比特信息的交换,这与四个物理比特传输一次交换1比特信息是基本等价的.由此可见,FTQKD2008方案的设计是非常合理的,它的基本思想可以根据特定的信息传输需要加以改进从而应用于其他的量子通信分支中.
前面介绍的容错方案中都是利用多粒子态构建退相干无关的子空间,利用它们已有的纠缠关系以及经历相同噪声的假设抵消噪声的影响.研究发现,光子的横模空间自由度在联合旋转噪声下表现出与极化自由度相同的变化规律,因此研究者们提出了利用同一个光子的两个不同自由度构建DFS从而对抗噪声的方案[160,161].这类方案是为了解决通信双方没有共享坐标系提出的,但它们同样可用于对抗联合旋转噪声.横模自由度的一组正交基矢由厄米-高斯模式的两个一阶模式HG01和HG10构成,可分别用h和v表示.由横模自由度和极化自由度构建的逻辑比特表示为:

这两个态相互正交,且在联合旋转噪声下保持不变,可用于容错的量子通信.具体过程与前面的方案类似.2008年,利用横模自由度的QKD方案还进行了实验[161].借助横模自由度的方案不需多光子纠缠,对光子丢失的敏感度也降低了,不过对于横模自由度的特性和操控还需要在实验中进行进一步的研究.
4 小 结
虽然近二十年来研究者们提出了很多对抗噪声的理论方法,但在现有的实验条件下光量子态的自避错传输和容错的量子通信这两类方法更具实用性.本文介绍了这两种方法的基本原理和代表性方案.我们看到,在有噪声的情况下实现安全高效的量子通信势必要消耗比理想条件下更多的量子资源.噪声的形式越复杂,所需的资源也越多,这些资源包括辅助的粒子、自由度、纠缠以及更复杂的操作和测量.一般来说,纠正错误包括发现错误、避免错误和纠正错误三个层次,避错比纠错更容易实现.要发现错误,一般需要比对经历相同噪声的两个部分、两个粒子或两个自由度;要避免错误,需要挑选没有受到影响的子空间,用额外的自由度、粒子或后选择来作为指针,判断是否避错成功.因此一般来说避错方案都是概率实现的,要达到100%的成功率需要更复杂的实验技术或装置.但是避错方案一般仅需利用线性光学元件,不需要利用纠缠,实验上容易实现,易推广,有非常好的实用价值,可以直接应用于已有的理想量子通信模型.而容错的方案虽然选择纠缠态构成的退相干无关的子空间编码信息,但可以完全包容错误,而且很多方案中仅需单粒子测量就可读取信息,大大降低了实验难度,也是一种非常高效实用的抗噪手段,在噪声条件下的量子通信中有非常好的应用前景.
到目前,单自由度光量子态的避错传输方案,借助辅助光子已经在实验上做了原理性验证[162];基于DFS的光子对纠缠分发方案借助辅助光子完成了初步的实验演示[163].自避错的光量子态方案实验实现也正在进行各种条件下的探索.
随着多自由度光量子态在量子信息中的应用,如超并行光量子计算[45−51],高容量的量子中继器[52],基于多自由度光量子态的量子通信[53−55],超纠缠态产生与区分[57−64],人们开始研究超纠缠纯化[95−99],超纠缠浓缩[69,75−80,83],多自由度下的避错与容错光量子态传输等[164−166]压制噪声影响的方法.将这些抵抗噪声的方法用于各种任务的高容量量子通信分支也是一件很有意义的事情,可能是今后量子信息研究的一个重要方向,譬如应用于量子信号放大[167−172],量子纠缠探测[173−177],逻辑比特纠缠分析[178−181],分布式量子机器学习等[182−184].
猜你喜欢
延边大学学报(自然科学版)(2021年2期)2021-07-29
科学导报(2020年66期)2020-11-02
湖北大学学报(自然科学版)(2020年1期)2020-01-07
心肺血管病杂志(2019年1期)2019-04-22
海峡姐妹(2017年10期)2017-12-19
三联生活周刊(2017年33期)2017-08-11
银行家(2017年1期)2017-02-15
军民两用技术与产品(2016年3期)2016-03-26
中国医学装备(2015年10期)2015-12-29
中山大学学报(自然科学版)(中英文)(2015年1期)2015-06-13