广义Gauss-Seidel迭代法的预测-校正方法
2018-07-28 09:03伊马木麦麦提阿布都热西提阿布都外力娜扎开提阿迪力
首都师范大学学报(自然科学版) 2018年1期
伊马木·麦麦提 阿布都热西提·阿布都外力 娜扎开提·阿迪力
(新疆大学数学与系统科学学院,新疆 乌鲁木齐 830046)
1 引 言
考虑线性方程组
Ax=b,
(1.1)
其中A是n×n的非奇异矩阵,b是n维向量.
将系数矩阵A进行分裂为A=D-L-U,其中D是对角矩阵,L是下三角矩阵,U是上三角矩阵.则经典的Gauss-Seidel迭代法为
x(k+1)=(D-L)-1Ux(k)+(D-L)-1b,
k=1,2,3,…,
(1.2)

对部分线性方程组而言,用经典Gauss-Seidel迭代求解,敛速度不理想,为了解决该问题,本文推出了广义Gauss-Seidel(简称为广义G-S)迭代法和它的预测-校正方法.
2 广义G-S迭代法
将系数矩阵A进行分裂为A=Dm-Lm-Um,其中Dm是带状对角矩阵,带宽为2m+1,Dm的各元素是
(2.1)
其中m=0,1,2,…,(n-1)/2,Lm与Um是矩阵A-Dm的严格上下部分,Dm,Lm,Um分别为
Dm=
如果取矩阵Dm-Lm作为迭代矩阵(Dm-Lm)-1Um,则得到文献[1]中的广义G-S迭代方法.迭代公式是
x(k+1)=(Dm-Lm)-1Umx(k)+(Dm-Lm)-1b,
k=0,1,2,….
(2.2)
若分裂矩阵中取矩阵Dm-Um作为迭代矩阵(Dm-Um)-1Lm,则推出的迭代方法是
x(k+1)=(Dm-Um)-1Lmx(k)+(Dm-Um)-1b,
k=0,1,2,….
(2.3)
当m=0时式(2.2)与(2.3)表示的是正,反方向的经典G-S迭代法,计算公式分别为
(2.4)
(2.5)
3 广义Gauss-Seidel迭代法的预测-校正方法
为了改进广义G-S迭代法的收敛速度,将两种广义G-S迭代方法相匹配,生成广义G-S迭代法的预测-校正方法:
(3.1)
本方法先用(2.2)的广义G-S迭代法预测y(k+1)的值, 然后用(2.3)的广义G-S迭代法校正x(k+1). 当m=0时,预测公式和校正公式的分量形式分别为
(3.2)
4 收敛性分析
迭代法的收敛性依赖于迭代矩阵,设迭代矩阵为G,则迭代法收敛的充分必要条件是ρ(G)<1(其中ρ是迭代矩阵的谱半径),充分条件是‖G‖<1(其中‖‖表示为任意范数).下面给出了一些比较容易验证的充分条件.
引理1[3]若M=(Mij)和N=(Nij)都是n×n的矩阵,并且M是严格对角占优矩阵,则矩阵M-1N的特征值满足
(4.1)
定理1如果A为严格对角占优矩阵,则新广G-S迭代法是收敛.
证明将严格对角矩阵A分裂为A=M+N,其中M=Dm+Um,N=Lm并且M是严格对角占优矩阵.从上述的引理可得
其中
(4.2)
我们先证:ρ=maxρi<1, 因为A是严格对角占优矩阵,所以满足
(4.3)
由式(4.3)可以推到
(4.4)
由不等式(4.4)可得ρ(M-1N)<ρ<1.据代法收敛的充分必要条件,新广义G-S迭代法是收敛.
定理2[2]如果A为不可约弱对角占优矩阵,则新的广义G-S迭代法是收敛.
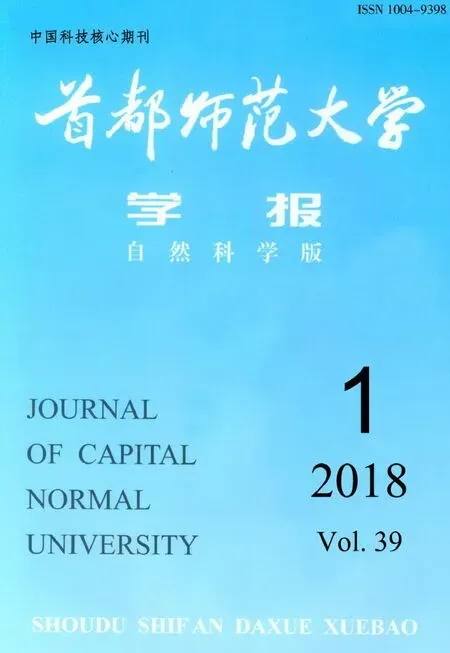
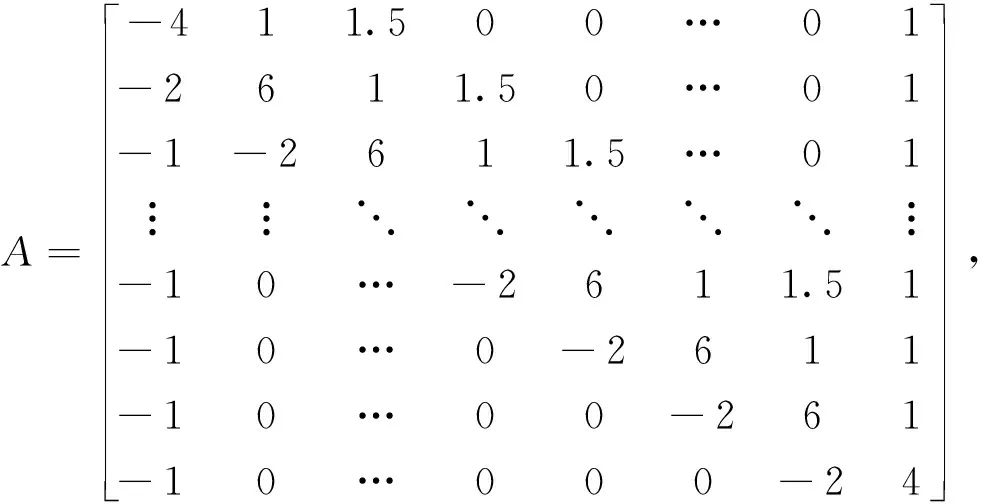
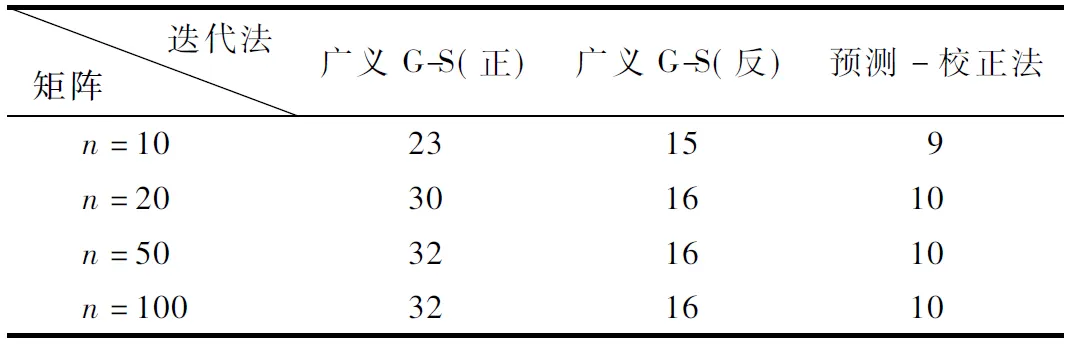
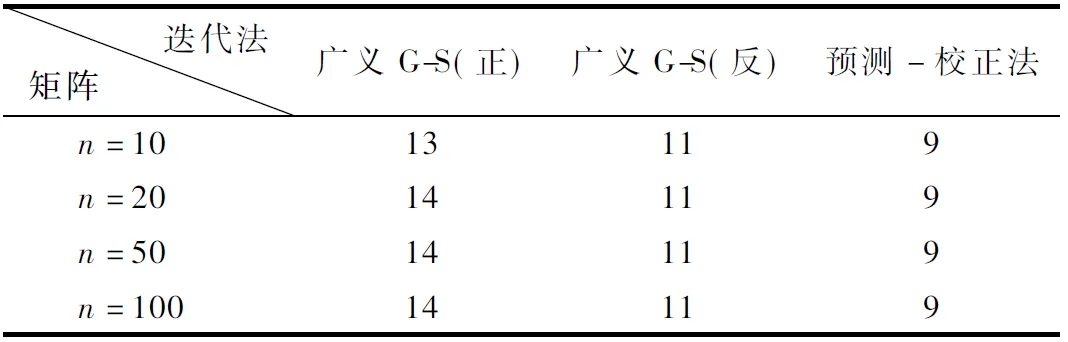
定义设A=(aij),B=(bij)是n×n的矩阵,如果aij与bij满足aij≤bij(aij≤bij),则矩阵A与B 的关系表示为A≤B(A 定理3[4]设矩阵A=(aij),B=(bij)若A≤B,bij≤0,且A是M-矩阵,则B也是M-矩阵. 定理4[4,5]若A∈Zn×n,则以下命题相互等价(其中0是零矩阵): (1)A为非奇异M-矩阵; (2)A是非奇异,且A-1≥0; (3)存在A的一种分裂A=P-Q(正则分裂),使得P-1≥0,Q≥0,且ρ(P-1Q)<1; 定理5如果A是M-矩阵,则新广义G-S迭代法是收敛. 证明设矩阵A分裂为A=P-Q,其中P=Dm-Um,Q=Lm. 因为A是M矩阵,显然,P≥A,Q>0,由定理3可知分裂矩阵P也是M-矩阵. 又因为P是M-矩阵,根据定理4的命题(2),(3)可知P是非奇异,P-1≥0,且ρ(P-1Q)<1,所以迭代矩阵的谱半径满足条件:ρ(P-1Q)<1,若系数矩阵A为M-矩阵,则新广义G-S迭代法是收敛. 定理6广义G-S预测-校正法收敛的充要条件是ρ(G正·G反)<1,收敛的充分条件是‖G正·G反‖<1. 证明用预测-校正公式(3.1)很容易推到: x(k+1)= (Dm-Um)-1Lm(Dm-Lm)-1Umx(k)+ (Dm-Um)-1Lm(Dm-Lm)-1b+ (Dm-Lm)-1b. (4.5) 由迭代式(4.5)可知预测-校正方法的迭代矩阵为G=(Dm-Um)-1Lm(Dm-Lm)-1Um, 根据矩阵的运算性质,可得迭代矩阵G刚好为两种迭代矩阵的乘积,即G=G正·G反,因此预测-校正方法收敛的充要条件是:ρ(G正·G反)<1,收敛的充分条件是:‖G正·G反‖<1. 由上面所述的一些定理可知,如果系数矩阵是对角占优矩阵,不可约弱对角占优矩阵,M-矩阵等情况下解线性方程程组的广义G-S预测-校正法是收敛的. 为了比较迭代法的收敛速度,下面给了数值例子,根据其结果,说明这些方法的优缺点. 例1[5]设线性方程组(1.1)中A,b值分别为 此线性方程组的精确解是x*=(1,1,…,1)T,迭代初始向量是x(0)=(0,0,…,0)T. 表1 当m=0时各种迭代法的迭代次数(经典G-S法) 表2 当m=1时各种迭代法的迭代次数 由表(1),(2)可知,广义G-S迭代法及预测-校正方法解线性方程组(1.1)均收敛,而反方法的收敛速度比正方法较快,预测-校正算法的收敛速度比两个方法都快(即取n相同值时,达到同样精度所需迭代次数较少).当参数m取不同值时,三种迭代方法的迭代效果也不相同,m的值越大三种迭代格式的收敛速度越快,迭代次数越少. 以上介绍了基于Gauss-Seidel迭代法的三种广义迭代方法.并在理论和数值计算方面证明了本文中的迭代法是有效的.若三种迭代法均收敛,则正反广义Gauss-Seidel迭代的收敛速度基本相同,预测-校正方法的收敛速度要比这两种广义迭代法更快一些.本文中迭代法的收敛速度依赖于带宽因子m,因此m取的值越大收敛速度也是越快.5 数值实验

6 结 语
猜你喜欢
中等数学(2022年8期)2022-10-24
中等数学(2022年6期)2022-08-29
南京大学学报(数学半年刊)(2021年2期)2021-04-19
应用数学(2020年4期)2020-12-28
数学年刊A辑(中文版)(2018年4期)2019-01-08
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
应用数学与计算数学学报(2014年4期)2014-09-26
应用数学与计算数学学报(2014年3期)2014-09-26
武夷学院学报(2014年5期)2014-07-19
文山学院学报(2012年6期)2012-03-25