多尺度下车载激光点云数据中电力线的提取
2018-07-28 09:04贾魁张晶
首都师范大学学报(自然科学版) 2018年1期
贾 魁 张 晶
(首都师范大学资源环境与旅游学院,北京 100048)
0 引 言
电力线为人们日常生活和商业活动输送电能,电力线的安全情况不容忽视.传统的人工巡线的方式检查电力线及其周边的安全情况,这种巡线方式效率低、人力成本高,而且在人工巡线监测电力线的过程中,即使观察到电力线周围的危险状况,也有可能记载错误,复查电力线工作效率更低、更费时费力[1].
车载激光雷达系统可以快速获取道路周围的高精度真三维点云数据,又如机载激光雷达系统可以快速获取大范围真三维点云数据[2],闫利等[3]使用车载激光雷达点云数据,通过观察电力线点云数据完成电力线巡查工作,既省时又省力.在山区完成电力线巡检工作比较困难,有些地方人很难到达,机载激光雷达可以很方便的获取山区电力线的真三维点云信息,从而可以服务于山区的电力线巡检工作.与机载激光雷达相比,车载激光雷达可以获得地物更高精度的三维信息[4-7].在城市区域,有树木和高楼等可能影响机载方式飞行,电力线点云数据的获取更适合用车载激光雷达系统[8].激光雷达技术代替传统的人工巡线方式可以更加高效率的服务于电力线巡线工作.在获取点云数据之后,如何更完整、更准确地提取出电力线点云数据成为需要解决的重要问题.
在国内外相关研究中,Kim和Sohn[9]提出基于特征值分析点云数据几何结构特征的方法,他们使用一个尺度计算目标点云数据及其邻域范围内构成的数据集合的协方差,然后判断分析当λ1≫λ2,λ3时,集合呈线分布特征,并通过Linearity=(λ1-λ2)/λ3计算分析可以得到该线分布的程度.Cheng等[10]也是通过特征值的分析提取了电力线点云数据,但是他们也只用了一个尺度进行的电力线点云数据提取,然后结合电力线上下连续性和水平方向连续性去除噪点,并结合方向、距离分析得到单根电力线点云数据集合.Melzer和Briese[11]使用霍夫变换的方法计算电力线交点预估电线杆位置,进而使用随机抽样一致性(random sample consensus)方法提取和重建电力线点云数据,但当该方法受初始模型的限制,如果初始模型选取不合适就会严重影响提取和重建结果.Guan等[12]使用霍夫变换算法提取电力线点云数据,并通过欧式距离法聚类每单根电力线点云数据.余洁等[13]使用滤波算法初步去除干扰点,然后使用角度滤波和二维霍夫变换的方法提取电力线点云数据.尹辉增等[14]使用霍夫变换特征空间全局方向特征分析,使用局部分段提取方法等对电力线点云数据进行提取,并聚类提取单根电力线点云数据.本研究主要探讨使提取更为完整的叠加多尺度电力线点云数据几何结构特征提取方法,本文使用多个尺度分析电力线点云数据几何结构特征,使用每个尺度分别提取线特征点云数据,最终将各个尺度提取的结果叠加,并计算各个尺度和叠加后的提取结果的电力线点云数据提取完整度,进行对比和分析.本研究还参考使用开源软件CloudCompare V2.7.0手动提取出电力线点云实验数据,该开源软件可以运行在Linux和Winodws等平台,具有点云数据裁剪、格式转换等基本功能,方便且好用[15].
1 电力线点云数据提取方法
在电力线点云数据提取方法过程中,首先使用Kdtree[16](k-dimensional)建立索引的方式找到待分析目标点云周围的点云数据集合,使用多个递增的尺度,分析点云数据集合的几何结构特征,得到该目标点呈现的几何结构分布特征(散乱点、线、面),在分析完所有点云数据之后,提取出呈线分布特征的点云数据作为电力线点云数据,然后叠加各个尺度提取结果,这样可以尽可能多的得到电力线点云数据.
1.1 几何结构特征分析方法介绍
在使用几何结构特征分析方法分析点云数据的几何结构特征分布情况时,首先找到待分析的目标点周围点云数据的集合,根据点云数据集合的X、Y、Z坐标数值计算该集合对应的协方差矩阵,然后计算该协方差矩阵的特征值,分析特征值之间的关系,从而得到该目标点所呈现的几何结构分布特征.对所有点云数据进行几何结构特征分析,提取出所有呈线分布特征的点云数据.
根据点云数据集合的X、Y、Z坐标计算协方差矩阵公式[17](1)如下:
(1)

在计算分析目标点云数据所呈现的几何结构特征时,首先计算出其周围点云数据集合对应的协方差矩阵,然后计算出三个特征值:λ1,λ2和λ3(λ1>λ2>λ3).然后分析λ1,λ2和λ3之间的关系,当λ1≫λ2,λ3时,该点云数据集合呈线分布特征,该目标点云数据识别为是呈线分布特征的点;当λ1≈λ2≫λ3时,该点云数据集合呈面分布特征,该目标点云数据识别为是呈面分布特征的点;当λ1≈λ2≈λ3时,该点云数据集合呈散乱分布特征,该目标点云数据识别为是呈散乱分布特征的点.这三种情况,可以转换为通过三个公式进行计算和分析,这三个公式如(2)所示:
(2)
当且仅当Linearity≈1,Planarity≈0且Sphericity≈0时,该目标点云数据邻域范围内点云数据集合呈线分布特征[10].
1.2 多个递增尺度分析点云数据几何结构特征
在分析目标点云数据几何结构特征之前,需要设定领域半径R来搜索该目标点云数据周围的点云数据集合,从而运用该点云数据集合进行协方差矩阵计算.这里所谓的多个尺度即设定多个领域半径R搜索,在不同尺度下,目标点云数据可能计算为呈现不同的分布特征[18].
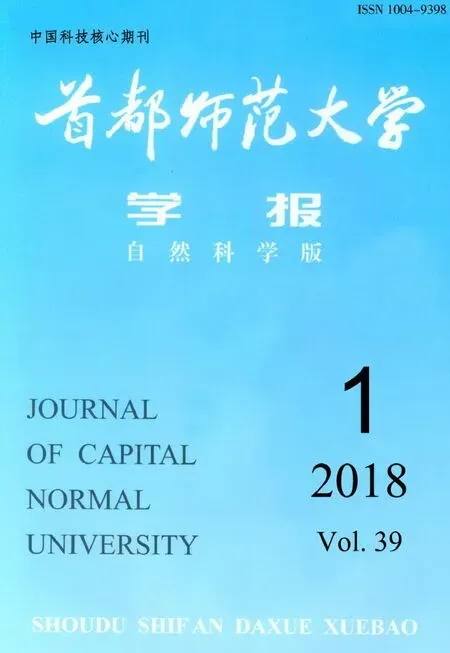
使用多个尺度即多个邻域半径R,分析点云数据是否呈线分布特征,不同尺度下分析得到的结果相互补充,最终得到更多、更准确的线分布特征的点云数据.如图1示,图中对同一个目标点云数据在不同邻域搜索半径范围内进行几何结构特征分析,根据图中邻域内点云数据分布情况可以明显看出当R=0.15 m时,该目标点云数据a周围的点云数据集合呈面或散乱分布特征;但当R=0.3 m时,该目标点云数据a周围的点云数据集合呈线分布特征.因此该呈线分布的点云数据在小尺度下不能正确识别出来,在之后的线分布特征的点云数据提取时会被遗漏掉.又如图2所示,当R=0.15 m时,该目标点云数据b在邻域半径R范围内的点云数据集合呈线分布特征;当R=0.3 m时,该目标点云数据b在邻域半径R范围内的点云数据集合呈散乱分布特征.因此该呈线分布特征的点云数据在大尺度下不能正确的识别出来,如果只用一个大的尺度提取线分布特征的点云数据,该目标点云数据会被错误识别并被遗漏掉.若用两个尺度分别进行几何结构特征分析,叠加分析结果,会尽可能多的得到呈线分布特征的点云数据集合.由于使用Kdtree算法建立了每个目标点云邻域内点集合索引,使用多个尺度分析相比单个尺度分析所用的时间不会提高太多计算时间和工作量.
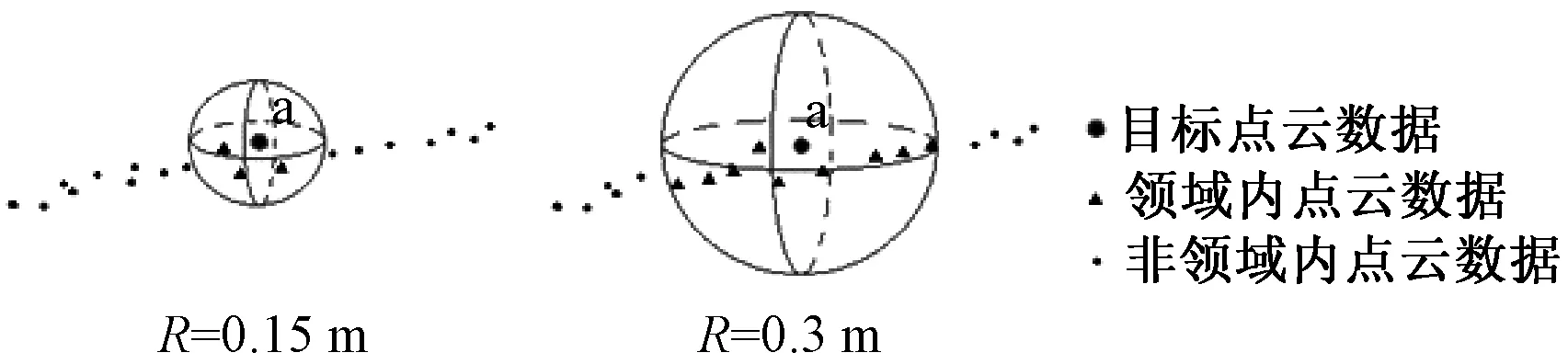
图1 目标点云在大尺度下分析为线特征但在小尺度下不为线特征
图2 目标点云在小尺度下分析为线特征但在大尺度下不为线特征
在提取电力线点云数据的过程中,建议根据点云实验数据的点间距,设定点间距两倍的长度作为邻域半径R最小值,使用多个递增尺度R进行分析.在电力线周围通常有散乱的树木点云数据,在较大的尺度下,因为树木点云数据周围通常是散乱点,树木上的点云数据会更可能的分析为散乱分布,而在小尺度下,由于树枝等也可能呈线分布特征,容易识别为线分布特征的点云数据,从而错误识别为电力线点云数据.本研究使用最小的领域半径R=0.15 m时可以很好的提取出大部分电力线点云数据.使用6个尺度R=0.15 m,R=0.25 m,R=0.35 m,R=0.45 m,R=0.55 m,R=0.65 m分别对电力线点云数据进行几何结构特征计算和分析,验证和分析不同尺度下提取线分布特征的点云数据结果完整度,并与合并结果的完整度进行比较分析.
2 实验结果与讨论
本文通过使用开源软件CloudCompare V2.7.0,人工手动提取出实验区域电力线点云数据,然后使用多个尺度分析这些电力线点云数据的几何结构分布特征,在各个邻域半径尺度下提取出呈线分布特征的点云数据作为成功识别为电力线点云数据的集合,通过对比成功识别的点云个数并计算提取结果的完整度,来分析多尺度提取分析方法的优势,从而为电力线点云数据提取方法提供参考.该实验过程是在Visual Studio 2010编程软件中编写C++代码完成,电脑配置安装内存是16 GB.
2.1 实验数据
实验区域选择北京莲花桥地区,采集的是车载点云数据,点间距大约为0.08 m,如图3所示,通过在CloudCompare V2.7.0中手动裁剪选取出电力线点云数据集合作为实验数据,总共有2 748个电力线点云数据.

图3 电力线点云实验数据
2.2 实验结果与讨论
根据电力线点云实验数据,分别用递增的6个尺度(R=0.15 m,R=0.25 m,R=0.35 m,R=0.45 m,R=0.55 m,R=0.65 m)对其进行几何结构分析,实验数据一共有2 748个电力线点云数据,不同尺度下提取出的电力线点云数据结果如图4所示,不同尺度下提取出的电力线点云数据结果是不一样的,不同尺度下提取出的电力线点云数据的个数不同,对比各个尺度下提取出来的结果可以看出,在R=0.15 m尺度下可以提取出来的电力线点云数据,在其他尺度下基本可以提取出来,相反其他尺度下提取出来的电力线点云数据在0.15 m尺度下基本可以提取出来.
如图5所示,合并所有递增尺度提取出的电力线点云数据结果,在同一个坐标位置下只保留一个点,得到2 727个电力线点云数据,结果比各个递增尺度提取出的电力线点云数据都多.表1中完整度是通过计算正确识别出的电力线点云个数与实验数据总的电力线点云数据个数比值得到的,从表1中可以看出,合并所有尺度的结果后,电力线点云提取的完整度比使用任一个邻域半径R提取出来的电力线点云数据的完整的高.从表1中还可以看出,随着邻域半径R的增大,完整度越来越低,这是因为电力线在自然环境中是悬链线形状,不是完全笔直的,电力线在局部接近直线,但是当领域半径R增大时,邻域半径范围内的电力线通常有一定的弧度,从而目标点云被识别为非电力线点云数据.这也是随着半径R的增大,电力线点云数据提取结果中漏分个数相对增多,正确识别出为电力线点云数据个数的减少原因.另外,在半径是0.15 m的时候电力线点云数据正确识别个数相对于其他阈值半径来讲是最多的,并且接近于合并所有尺度结果的总的正确识别个数,如果是使用单个半径阈值提取电力线点云数据,本实验建议使用0.15 m,该值设定是考虑到实验数据点间距来设定的,其大小约为点间距的2倍.

图4 不同尺度几何结构特征提取电力线点云数据

图5 合并多个尺度电力线点云数据提取结果

领域半径R/m正确识别数量/个漏分数量/个完整度/%0.152 6856397.70.251 6771 07161.30.351 5611 18756.80.451 5501 19856.40.551 5421 20656.110.651 0481 70038.11合并所有尺度的结果2 7272199.24
3 结 论
本研究使用CloudCompare V2.7.0开源软件提取出的电力线点云数据作为实验数据,多个递增尺度提取呈线特征点云数据,并计算各个尺度提取结果的完整度,使用半径0.15 m时进行几何结构特征分析得到的电力线点云数据比使用其它半径分析得到的电力线点云数据都多,但多尺度结果叠加后提取结果的完整度最高,叠加多个尺度电力线点云数据提取结果可以获得更多、更完整的电力线点云数据,该叠加多尺度电力线点云数据提取结果的思路可供电力线点云数据提取与重建过程参考,但该研究也需要继续进行,由于激光雷达扫描过程中收到遮挡等原因,电力线点云数据出现数据缺口情况,这时可能影响提取精度,存在数据缺口时的解决办法将在作者毕业设计中继续研究进行.
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
吉林大学学报(理学版)(2020年3期)2020-05-29
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
自动化学报(2018年7期)2018-08-20
电子制作(2017年14期)2017-12-18
电信科学(2016年11期)2016-11-23
周口师范学院学报(2016年5期)2016-10-17
电测与仪表(2014年13期)2014-04-04