
RSS协助的Ray-tracing室内定位算法
2018-07-26 00:26史云飞郝永生刘德亮
信号处理 2018年10期
史云飞 郝永生 刘德亮 王 波
(陆军工程大学石家庄校区,河北石家庄 453000)
1 引言
随着定位技术的飞速发展,基于位置的服务(Location Based Service,LBS)应运而生,受到人们越来越多的关注。在生活中,LBS为人们的生活提供越来越多的便捷服务,例如外出旅游时,LBS可以在当时的位置提供餐饮、娱乐等信息查询服务,在发生事故时可以更快地提供应急救援服务和人员位置跟踪,但是LBS对位置精度要求很高[1]。在室外环境中,通常采用全球定位系统(Global Positioning System,GPS),但是当卫星信号进入室内后,由于障碍物(如墙壁和橱柜等)的阻挡,信号变弱,导致定位误差较大,不能满足室内环境对定位的需求,因此需要采用其他技术对室内环境进行定位[2]。影响室内无线定位的主要因素有两个:信号的非视距传播和多路径传播[3],为解决这两个问题,常利用TOA、信号到达时间差(Time Difference of Arrival,TDOA)、DOA和RSS等定位参数来进行室内环境下的定位分析。在利用TOA进行定位估计时,它能在视距情况下取得一个较高的精度,但是在NLOS环境中其定位精度下降严重。为此,在[4]中首先利用基于随机特征的粗NLOS检测方案,再使用迭代最小残差的方法来减轻NLOS的影响,但其定位精度十分依赖于随机特征检测方案;在室内定位中常常利用RSS,因其具有低成本,易获取的特性,但其定位精度十分依赖于路径损耗预测模型,在[5]中,使用Bluetooth LE技术时提高RSS的计算值准确度,是一种高精度,小误差率的路径损耗模型,但其只适用于10~12英尺之间的非常短的范围;在[6]中介绍了一种基于RSS/TDOA的融合定位算法,综合了两种定位方法的优势,减少了位置指纹查找时间和计算过程,但实时性较差。在[7]中介绍了一种利用虚拟基站和凸优化算法来处理信号在NLOS情况下的传输问题,但其只适用于室外情况。在[3]中介绍了一种基于虚拟基站的TOA、DOA室内信号模型和算法,利用虚拟基站将非视距路径转化为视距路径,以此减少非视距的影响,但其定位至少需要使用两个基站,成本较高且受到基站的限制较大。在本文中,提出一种利用RSS进行协助定位,融合TOA、DOA几何传输模型的ray-tracing算法,首先通过RSS模型得到信号源可能存在的位置,随后利用ray-tracing原理并使用虚拟基站,将非视距路径定位问题转化为视距路径定位问题,TOA和DOA对直射、透射、反射和绕射情况进行分析建模,最后使用最小二乘法对可能的位置进行筛选,得到信号源的最终位置。本算法利用信号RSS测量值优化算法,实现TOA、DOA和RSS协同定位,提高室内多径及非视距环境下,无线定位的精度,降低算法复杂度,提高算法处理信号多重散射的能力,并降低了对基站的依赖性适用环境更为广泛,仿真结果表明其具有较高的定位精度。
2 基于信号强度的测距模型
当信号传播时,接收信号的强度随着距离的增加而衰减,这种衰减特性包含了距离信息。在自由空间中,信号强度与传播距离的平方成负相关性,通过计算发射功率和接收功率的差,就可以获得距离值,这个计算过程被称为路径损耗,且它因环境而异,令Pr(d)表示接收者在距离信号源距离为d的位置接收到的信号强度,它们之间的关系可以用Friis公式表示[8]:
(1)
其中,Pt为信号源的发射功率,Gt和Gr为天线在发送和接收信号时的增益,λ为电磁波的波长。在室内环境中,由于散射,反射和散射引起的多径衰落和室内遮蔽效应,信号强度随着距离线性增加呈现出非线性如图1,与线性曲线y=ax+b相比RSS值呈现出抛物线型。
对周围环境基本没变化,且反射路径较少的情况,可以利用以下反射模型来进行计算:
(2)
其中r1是发射端到障碍物的距离,r2为障碍物到接收端的距离,σ为反射因子,表示反射对象的雷达截面积的入射功率和散射功率的比值,且人的反射因子σ=1[9]。

图1 RSS的非线性Fig.1 Nonlinearity of RSS
由于传统的RSS测量的是多径信号的叠加信号,对于典型的多径传播环境,发射信号通过不同的衰减、延迟和相移的多径传播到接收端,因此多径传播是RSS测距的主要误差源,针对这种环境,可以使用更细粒度的信道模型—信道冲击响应(Channel Impulse Response, CIR)。CIR在时域上刻画了小尺度多径效应,用时域线性滤波器表示,假设时不变,CIR可以表示为:
(3)
其中,ai、θi和τi代表第i条多径分量的幅度、相位和时延,N为多径总数,δ(τ)为Dirac冲激函数。要想利用CIR的信号功率测距,可以将CIR与Friis公式相结合,同时可以解析全部多径分量[10]。假设有N条多径分量,每条多径分量的传播距离为di,其中i=1,2,…,N;并且假设每条多径分量仅发生一次反射,对应的反射系数为Γi,根据定义,Γ1=1。则波长为λk的发射信号经由第i条多径分量传播,接收到的功率P(di,Γi,λk)可以表示为:
(4)
其中,di和Γi为第i条多径分量的传播距离和反射系数,n为衰减因子。将该发射信号的N条多径传播的接收功率叠加,并进行正交分解,可得:
(5)
其中,x=(c,Γ2,…,ΓN,d1,…,dN)∈2N,P(x,λk):2N→为波长为λk的单音信号经由全部N条路径传播的总接收功率。如果测量足够多个频点fk=υ/λk就可以求解出该组方程,从而可以得到LOS路径的传播距离d1,令dR=d1。基于CIR信号模型的测距精度取决于对多径分量的时间分辨率即系统带宽,所以高宽频的WLAN协议可以进一步的提高其性能。
对于一个基站,在通过RSS解算得到的距离dR后,只能确定信号源处于以基站为圆心,以解算得到的距离dR为半径的圆上,并不能得到其具体的位置。
3 虚拟基站的建立
在利用虚拟基站进行定位时,需要用到ray-tracing原理来建立几何模型,其主要是利用无线信号的传播特性与光的传播特性相似,因此可以将光的传播特性用来分析信号在特定环境的传播路径。这里分析暂时不考虑路径损耗。对于室内环境,无线信号的传播方式主要有以下几种:直射、透射、反射、绕射和混合路径。
3.1 直射路径
对于直射路径,信号从未知的信号源发出,经过直射路径到达基站,假设信号源的位置为xm=[xm,ym]T,基站的位置为xB=[xB,yB]T,基站测得的TOA值为t,DOA值为θ,其中θ∈[-π,π],对信号源到基站的距离d有:
(6)
其中,c为传播速度,egauss为高斯噪声,bnlos为非视距误差,遵循指数分布,且有:
所以,最终信号源的位置可以表示为:
xm=xB+[dcos(θ),dsin(θ)]T
(7)
因为xB的位置已知,所以我们可以直接得到未知信号源xm的位置。对这种情况,不需要建立虚拟基站。
对于透射路径,可以直接当成直射路径来进行分析处理,因为在几何方法中,非视距引起的误差远大于一般透射引起的误差[3]。
3.2 反射路径
3.2.1 单次反射
对于反射路径,信号因被障碍物阻挡而发生反射,根据ray-tracing原理,所有反射均被认为是镜面反射,虚拟基站与基站关于反射面对称,如图2所示。

图2 单次反射Fig.2 Single reflection
信号从信号源xm=[xm,ym]T经过反射面AB到达实体基站xB=[xB,yB]T,基站所测得的TOA值和DOA值分别为t和θ,将反射面AB用一条直线l来表示:
Ax+By+C=0
(8)
可以得到虚拟基站xV=[xV,yV]T的坐标可表示为:
xV=xB+G
(9)
其中
实体基站到直线l的距离为d′,反射面l与x轴正向的夹角为φ,当实体基站位于反射面AB的下方或者左侧时,d′取正值,反之取负值。P为反射点,且有xB与P点构成的直线:
y-yB=tanθ(x-xB)
因此有P点坐标可以通过下式求得:
信号从信号源到达实体基站的条件,即发生反射的条件为:
(1)估计的TOA距离大于实体基站与反射面之间的距离,即d>|d′|;
(2)反射点P需要在反射面AB上,即θ1∈(α,β)。
其中θ1为虚拟基站看信号源的DOA值,且有θ1=θ-2φ,α和β分别为直线AxV和直线BxV与x轴正向的夹角。
所以可以得到信号源的位置:
xm=xV+F
(10)
其中
F=[dcos(θ′),dsin(θ′)]T
所以,当虚拟基站设立后,可以将原信号的反射路径看作信号从信号源发出,通过直射路径到达虚拟基站,从虚拟基站所测得的TOA距离值和DOA值分别为d和θ′。
若考虑存在透射情况,即存在另一个信号源点xm1,xm1可以表示为:
xm1=xB+[dcos(θ),dsin(θ)]T
(11)
3.2.2 多次反射
在实际情况中,因为环境十分复杂,可能存在多次反射的情况,对于多次反射,需要建立多个虚拟基站,因为三次以上反射衰减就非常大,所以不考虑这种情况。对于多次反射,如图3所示。

图3 多次反射Fig.3 Multiple reflection
假设有n个反射面(为了简洁,图中只画了两个),分别用直线li表示,即:
Aix+Biy+Ci=0i=1,2,…,n

对于反射面li,虚拟基站的位置为xVi,信号源可能的位置为xmi,表示信号发生透射后,经过反射面li到达实体基站(当i=1时)或虚拟基站(当i>1时);xm(i+1)表示另一个可能的信号源的位置,表示信号发生反射后,经过反射面li到达实体基站(当i=1时)或虚拟基站(当i>1时),此时对虚拟基站有:
xVi=xV(i-1)+Gi
(12)
其中
xV 0=xB
其中φi为直线li与x轴正向的夹角,当实体基站位于直线li的下方或者左侧时,d′取正值,反之取负值。αi和βi分别为直线li的反射边界,所以信号源的位置为:
xmi=xV(i-1)+Fi-1
(13)
其中:
之后,对下一次反射进行分析,即分析下一个i,直到所有反射面全部被分析完,或者反射条件已不成立,则停止分析,停止条件如下(三者满足其一则可以停止分析):
3.3 绕射
因为信号可能会在障碍物端点发射绕射,如图4所示,假设信号在A点处发生绕射,将虚拟基站xV设立在绕射点A处,信号由信号源发出,经过障碍物端点,即绕射点A到达基站。由绕射性质可知,当信号发生绕射时,信号在绕射点的所有方向上均发生绕射,即θ′∈[-π,π],因此只能知道信号源可能的位置,其轨迹为一个圆,且圆心位于绕射点A,所以有:
(14)
其中:
dV为基站到绕射点之间的距离,可以从室内布局图中得到。

图4 绕射Fig.4 Diffraction

4 位置筛选

对直射、反射和绕射路径,因为能量在传播中信号能量会衰减损耗,所以通过TOA所测量得到的距离值d是大于RSS解算出的距离值dR,即d>dR。
对于反射路径,以虚拟基站为圆心,以RSS解算出的距离值dR为半径,建立一个圆,即:
(15)
对于直射、透射和绕射则以基站为圆心,以RSS解算出的距离值dR为半径,建立一个圆:
(16)
因为对于每个虚拟基站都会计算得到两个解算点xmi和xm(i+1),对每个虚拟基站,将两个解算点带入上式中,即:
(17)
若解算点满足上式,因其明显小于RSS解算出距离值dR,这显然是与现实不符的,故可以将该解算点排除。
对于绕射路径,因为只通过TOA和DOA估计时其轨迹是圆弧,而通过RSS估计时,得到的是一个圆(也可视为圆弧),其必相交于一点,如图4所示,相交的这一点就为信号源的实际位置。
(18)
其中:
由此,便可以筛选出信号源的位置。
5 仿真实验
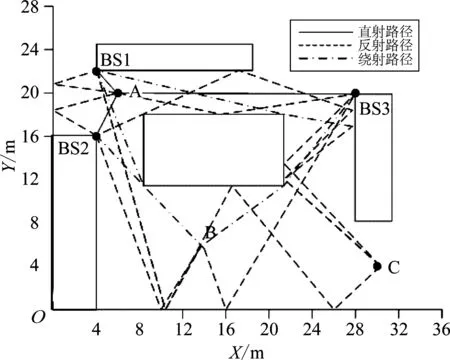
图5 仿真环境Fig.5 Simulation environment
在如图5的室内环境中,所有障碍物(包括墙面)都被认为是光滑的反射面。在仿真中,使用三个基站,位置分别为:BS1(4,22),BS2(4,16),BS3(28,20),三个信号源,位置分别为:A(6,20),B(14,6),C(30,4)。假设每个基站与信号源之间,提取了RSS信号值,并估计出了TOA和DOA值,信号的路径如图5中所表示。当信号源的位置位于A点时,信号源处于所有基站的视距路径下,因此所有的主路径为直射路径,次路径为一次反射路径;当信号源的位置位于B点时,所有的主次路径为一次反射路径或者一次绕射路径;当信号源的位置位于C点时,几乎所有的路径为多重反射路径或者混合路径;根据ray-tracing算法提前得出所有路径实际的TOA和DOA值,并且加上零均值高斯白噪声。将本算法与其他两种算法通过3000次蒙特·卡罗方法来进行比较分析,算法1[3]同是利用ray-tracing原理和虚拟基站的TOA和DOA参数模型算法,但是它是通过两个基站的得出两条信号路径,得到的最后的结果,在通过最小二乘法来计算出最后的位置;算法2[11]利用加权因子来减少多径的影响。
利用平均均方根定位误差(average root mean square error,ARMSE)来评估各算法的定位性能。设置仿真条件为TOA的噪声标准差为1 m,DOA的噪声标准差从1°到10°,其间隔为1 s,仿真结果如图6所示。

图6 ARMSE对比Fig.6 Comparison of ARMSE
由仿真结果可以看出,当信号源处于A点时,由于基站都处于视距情况下,因此三种算法的定位误差相差不多,但总的而言,本文所推荐的算法和算法1误差更小,算法1的误差为0.39~0.43 m,所推荐的算法为0.38~0.42 m,优于算法1。当信号源处于B点时,因为处于非视距的情况,推荐的算法和算法1的误差相差不多,均在0.58~0.65 m之间,但算法2的误差达到了3.4~3.5 m,明显不足以用于室内环境。当信号源出于C点时,非视距情况十分严重,但推荐的算法的误差在0.785~0.9 m,算法1的误差为0.95~1 m。
得益于精确的CIR信道模型,所推荐的算法精度优于算法1特别是算法2。虽然视距情况下如处于A点精度对比算法1只有0.01 m的提升,因为在这种情况下,由TOA、DOA所得到的精度已经足够高,CIR所能提供的协助精度有限,因此精度相差无几,但是随着非视距程度的不断加深,特别是处于C点时,推荐的算法的优势就已经很明显了,结果也很好的表明推荐算法提高了处理信号多重散射的能力。
为了凸显CIR在少基站情况下的优势,在实验中,只使用基站BS2和BS3,对B点和C点再一次进行仿真验证并与算法1进行对比分析,结果如图7所示。对比B点在只使用两个基站的情况下,两种算法都比原先的精度0.58~0.65 m有所下降,但是推荐的算法精度为0.67~0.7 m,而算法1的精度却下降到0.95~0.97 m;在C点这种现象表现的更为明显,推荐的算法下降至0.85~0.94 m,而算法1已经下降到1.38~1.4 m,由此可以分析出算法1对基站的依赖性较大,相对而言,推荐算法受限基站的影响小。


图7 双基站时ARMSE对比Fig.7 Dual base station ARMSE comparison
从仿真结果可以得到,推荐算法提高了处理信号多重散射的能力,并降低了对基站的依赖性适用环境更为广泛,且具有较高的定位精度。
6 结论
针对室内环境因信号受到非视距和多径影响,提出一种利用RSS进行协助定位,融合TOA、DOA几何信道模型的ray-tracing算法,通过利用虚拟基站和ray-tracing原理,将非视距情况转化为视距情况来进行处理分析,建立了基于TOA和DOA在直射、透射、反射和绕射情形下的几何信道模型,使其能很好地处理复杂的非视距室内环境,并利用RSS对其定位进行的筛选和辅助估计定位,仿真结果表明,推荐算法提高了处理信号多重散射的能力,并降低了对基站的依赖性适用环境更为广泛,且具有较高的定位精度,若能有一个更为精确的信号能量衰减模型,定位精度能进一步的提高。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中国测试(2022年5期)2022-06-10
航天制造技术(2020年5期)2020-11-10
天文学报(2020年5期)2020-09-28
科技视界(2020年19期)2020-07-30
中国计算机报(2020年9期)2020-03-25
北京航空航天大学学报(2017年7期)2017-11-24
家庭影院技术(2017年8期)2017-10-13
汽车与安全(2017年9期)2017-09-29
家庭影院技术(2017年9期)2017-09-26
