多径对线性调频连续波雷达测角影响分析
2018-07-23 08:09西安电子工程研究所王彬彬
电子世界 2018年13期
西安电子工程研究所 王彬彬
1.引言
线性调频连续波(LFMCW)雷达具有测距精度高、无距离盲区、结构简单、造价低、便于应用快速傅里叶变换(FFT) 等现代数字信号处理方法等优点[1],因此在汽车无人驾驶、飞机测高、靶场测量等领域有广泛的应用。与对空搜索相比,地面雷达工作在低仰角时受到的杂波影响更为严重,动目标显示(MTI)和动目标检测(MTD)等方法可有效的消除固定杂波的影响[2],但对于运动目标,由于目标所在背景复杂,多径反射的信号与目标的后向散射信号叠加进入雷达接收机,如图1所示。如果不采取有效措施,多径效应将严重影响雷达的测量精度[4],甚至在某些环境下使雷达不能正常工作。
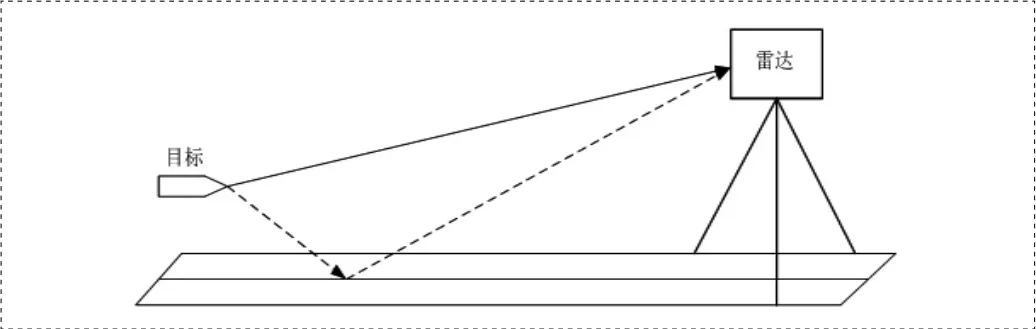
图1 地面反射所形成的多径信号
2.系统模型
假设目标距离地面的高度ht=0.5m,雷达距离地面高度hr=1.5m,目标与雷达的水平距离L=150m,计算可知直射信号与地面多径反射信号的波程差ΔR =0.0125m,对应的时间差为Δt =ΔR /c=42ns,有用信号与反射信号的入射角度相差Δθ=0.57°,因此雷达要从时间和角度上把两个信号进行区分非常困难。假设后向散射信号S(t ),经过地面多径反射信号s(t-Δt ),则两个信号的频谱分别为S(ω)和S(ω)e-jwΔt,两个信号具有相同的幅频特性,但由于延迟的影响,多径信号的相频特性与后向散射信号不同,因此两者叠加后的信号对利用回波幅度特性检测的参数,如距离、速度,由于回波与多径处于一个距离单元和多普勒单元内,因此对测量精度的影响较小。而要利用回波的相位特性进行测量的参量则会受到影响,并且多径信号的相位以2π为周期变化。
3.测角方式
3.1 干涉法测角
干涉法测角具有精度高、结构简单的特点,在电子侦察,航天器交会等领域具有重要的用途。干涉法测角中一般情况下天线间距d > λ/2,因此相位模糊是一定存在的。对同一个天线单元,直射信号与多径信号由于波程差不同,接收机收到的相位也不同,并且以2π●ΔR / λ 的关系变化[3],例如对于一个工作在18GHz的雷达,波长为0.0167米,如果反射信号幅度较强,此时由于波程差引起的多径信号与直射信号的相位差不可忽略。对于多基线的系统,通常可以采用长短基线法、参差基线法、虚拟基线法、立体基线法等。对于单基线系统,可以采用多频发射多频接收的方法求解相位模糊,通常有双频法,三频法。这两种方法也可以结合使用。此处对采用双频双基线与双频单基线的两种算法进行比较,假设目标飞行航迹为直线,俯仰角为0°方向。采用最小残差法求解模糊度,多径信号的幅度为直射信号的0.8倍。图2为俯仰角通过仿真可以看出,采用双频单基线方法,多径引起的测角误差最大引起了两个整周模糊度的误差,解模糊错误在整个距离段都存在,并且在近距出现的频率更高;采用双频双基线的方法,扩大的求解空间,减少了出现整周模糊度错误的概率,但由于多径信号的存在,测角值仍有±1°之间测偏差,这对精度要求比较高的系统,仍然有较大的误差。
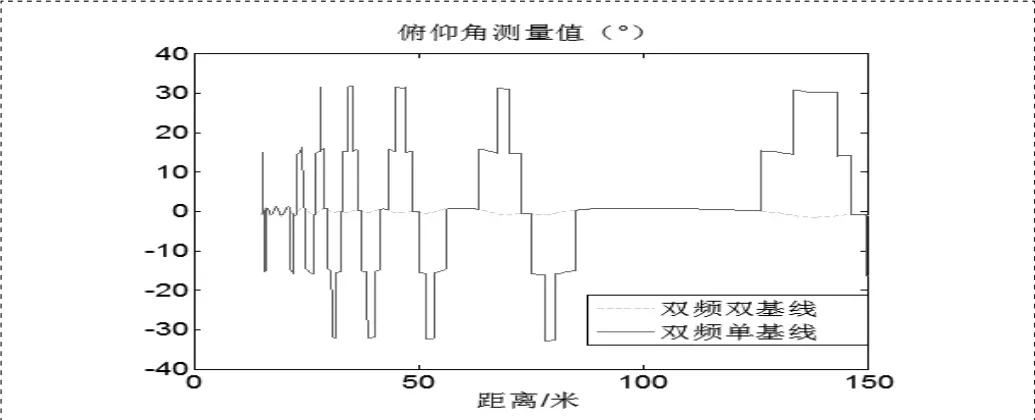
图2 两种干涉法测角性能对比
3.2 比幅法测角
比幅法利用回波信号的幅度信息测量目标的角度信息,以等信号法为例,采用两个相同且部分重叠的波束照射目标,当目标处于轴线时,两个波束受到的信号的强度相同。当目标偏离轴线时,一个波束的回波强度就会高于另一个,可以利用查表等方法估计出目标偏离程度,也可以采用和差法来测量目标的偏离程度。等信号法灵敏度高,理论上对收发公共天线的雷达,精度可达波束半功率宽度的2%[2]。对连续波雷达,收发天线是分置且同时工作的,因此收发波束存在结构位置上的偏差;连续波雷达一般体积受限,天线孔径受到结构的限制导致天线增益不能太高,因而波束宽度不能做到很小,因此测量精度也受到影响。通过提高系统的工作频率提高测量精度,但雷达威力又会减小,因此采用比幅法也存在精度上的问题。
4.误差分析与总结
通过上述分析可以得知,对地面雷达而言,目标距离较近时多径信号与有用信号在时间上和角度上难以区分。两者的频谱具有相同的幅度特性和不同的相位特性,因此在多径信号较弱时,采用干涉法测角具有精度高,结构简单的优势,而多径信号较强时,信号的相位特性受到严重干扰,采用幅度法测角具有较好的抗多经性能,但测角精度与波束宽度等因素有关,在多径信号较弱时测角精度与干涉法存在差距。
猜你喜欢
高技术通讯(2021年3期)2021-06-09
科学(2020年5期)2020-11-26
通信技术(2019年3期)2019-05-31
声学与电子工程(2017年1期)2017-06-22
中国交通信息化(2017年10期)2017-06-06
舰船电子对抗(2016年5期)2016-12-13
电子制作(2016年1期)2016-11-07
学习月刊(2016年19期)2016-07-11
四川师范大学学报(自然科学版)(2015年4期)2015-02-28
航天器工程(2014年5期)2014-03-11