基于ESP的纯电动汽车稳定性控制及仿真*
2018-07-13 02:46方春杰
汽车工程师 2018年6期
方春杰
(重庆交通大学)
随着车辆高速化和车流密集化日趋明显,纯电动汽车在极限工况下失稳而引发的道路交通事故日益增多,其稳定性和安全性备受关注。在高速移线换道或紧急避障及侧风干扰等极限工况下,纯电动汽车轮胎往往工作于非线性区域,此时汽车质心侧偏角迅速增大,横摆力矩和侧向力对汽车转向盘转角响应的敏感度下降,当汽车质心侧偏角很大时,横摆力矩和侧向力基本上不受转向盘转角的控制[1-2],从而导致汽车的可操控性急剧下降,此时汽车极易发生侧滑现象,偏离其预定的行驶轨迹而出现失稳状态,危及驾乘人员的人身安全。作为一种典型的主动安全技术,汽车电子稳定程序(ESP)系统可用于实现纯电动汽车在上述极限工况下的稳定性控制,其主要通过控制左右两侧车轮制动力或驱动力之差产生的横摆力矩来防止汽车在高速行驶转弯或紧急制动过程中失控[3]。因此,文章以纯电动汽车为研究对象,采用CarSim建立整车参数化模型,并在MATLAB/Simulink中搭建驱动电动机模型、3自由度车辆参考模型以及车辆ESP的LQG控制模型,在ISO 3888紧急双移线工况下,采用CarSim和MATLAB/Simulink对纯电动汽车ESP控制策略进行联合仿真验证,以验证控制的有效性。
1 车辆动力学建模
1.1 整车参数化模型
为了反映纯电动汽车在极限工况下的动力学特性,根据车辆稳定性控制的实际需求,在CarSim中建立整车参数化模型,选取CarSim中前轮驱动前轮转向的D级轿车,其模型主要性能参数,如表1所示。

表1 整车参数化模型主要性能参数
1.2 驱动电动机模型
由于CarSim中选用的D级轿车默认的动力源为传统的内燃机,而文章研究对象为纯电动汽车,因而需要利用外部的电动机模型替换CarSim软件内部已有的内燃机模型。
基于交流变频调速原理和矢量控制理论[4],采用理论建模法在MATLAB/Simulink中搭建纯电动汽车交流感应驱动电动机模型,如图1所示。该驱动电动机在驱动模式和制动工况下的工作效率图,如图2所示。驱动模式下,纯电动汽车驱动电机处于电动机状态,输出驱动力矩;而在制动工况下,驱动电机处于发电机状态,电动机控制器控制驱动电动机回收再生制动能量,并产生再生制动力矩。

图1 纯电动汽车交流感应驱动电动机模型
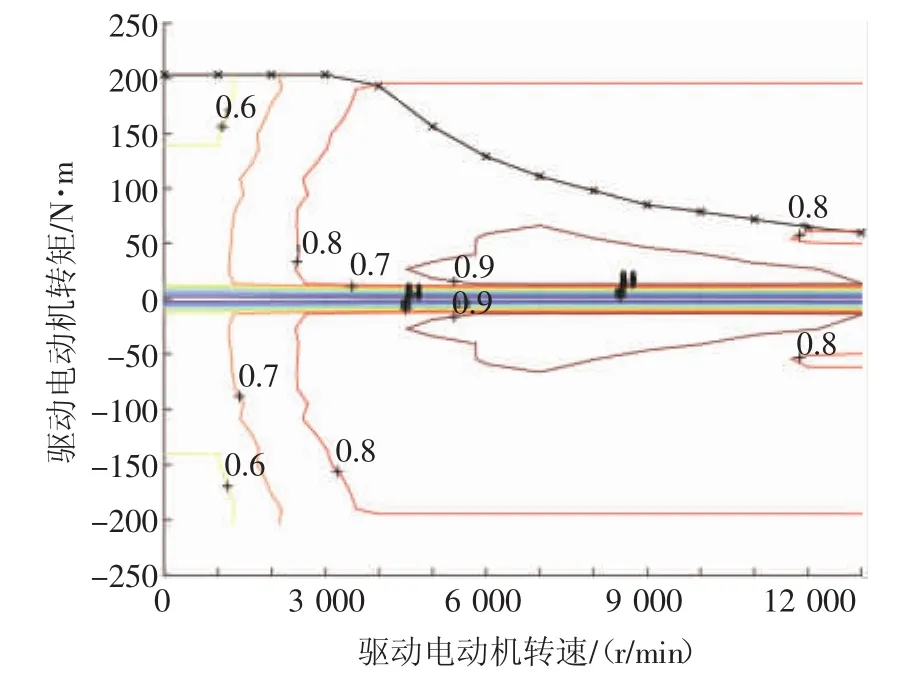
图2 驱动电动机工作效率图
1.3 车辆参考模型
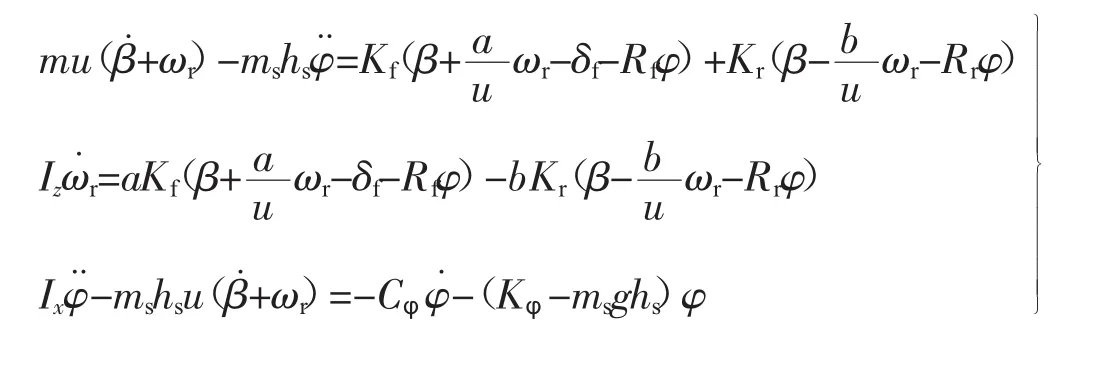
为了计算期望横摆角速度和期望质心侧偏角等汽车理想运行状态参数,考虑汽车的侧向运动、横摆运动及侧倾运动,建立3自由度车辆参考模型[5],其动力学方程为:

式中:m——整车质量,kg;
ms——簧载质量,kg;
u——纵向车速,m/s;
β——汽车质心侧偏角,rad;
ωr——汽车横摆角速度,rad/s;
ω˙r——汽车横摆角加速度,rad/s2;
a,b——汽车质心与前后轴之间的距离,m;
hs——汽车侧倾力臂,m;
φ——车身侧倾角,rad;
φ˙——车身侧倾角速度,rad/s;
g——重力加速度,取9.8 m/s2;
φ¨——车身侧倾角加速度,rad/s2;
Ix,Iz——汽车绕x,z轴的转动惯量,kg·m2;
Kf,Kr——前后轮轮胎侧偏刚度,N/rad;
Kφ——前后悬架总侧倾刚度,N·m/rad;
Cφ——前后悬架总侧倾阻尼,N·m·s/rad;
Rf,Rr——前后车轮侧倾转偏系数;
δf——前轮转角,rad。
汽车等速行驶且在转向盘角阶跃输入下进入稳态响应时产生期望横摆角速度和期望质心侧偏角,此时ωr,β,φ 均为定值,即在式(1)中存在ω˙r=0,β˙=0,φ˙=0,由车辆参考模型可计算出汽车期望横摆角速度和期望质心侧偏角分别为:
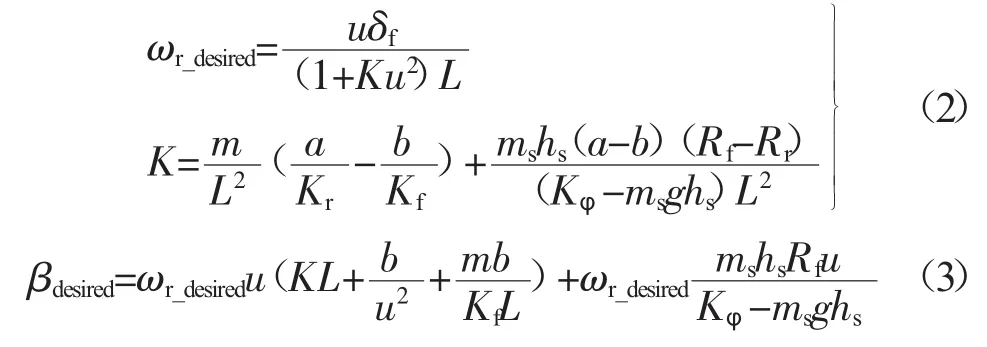
式中:ωr_desired——期望车辆横摆角速度,rad/s;
K——车辆稳定性因数,s2/m2;
L——轴距,m;
βdesired——期望质心侧偏角,rad。
路面附着条件是影响汽车行驶稳定性和安全性的重要因素,必须加以考虑。极限工况下,随着轮胎侧偏角增大,轮胎侧偏力也迅速增大,从而导致轮胎达到路面附着极限。为了防止汽车发生侧滑,此时车辆参考模型计算出的期望横摆角速度值应由边界值代替。车辆期望横摆角速度的边界值为[6]:

式中:μ——路面附着系数。
2 纯电动汽车ESP控制
采用ESP系统对极限工况下的纯电动汽车施加控制,以保证纯电动汽车的侧向稳定性。纯电动汽车ESP控制的关键环节主要包括ESP控制策略的制定(即附加横摆力矩决策方法)以及各车轮制动器制动力的分配控制。
2.1 汽车附加横摆力矩LQG控制器设计
基于3自由度车辆参考模型,选取期望质心侧偏角和期望横摆角速度作为状态变量,即:X(t)=[βdesiredωr_desired]T,输入变量:U(t)=[δfδr]T,得到汽车理想操纵特性的状态方程,如式(5)所示。

纯电动汽车本身是一个非线性较强的复杂系统,在极限工况的影响下,汽车的实际操纵特性往往会偏离理想操纵特性,此时需要产生一个用于纠正汽车运行状态的附加横摆力矩,使汽车横摆角速度及质心侧偏角的实际值尽可能逼近期望值。为了表达附加横摆力矩与汽车运行状态参数偏差之间的关系,选取状态变量X1(t)=[β ωr]T,输入变量U1(t)=[δfδr]T,将汽车的实际操纵特性简化为:

将式(6)减去式(5)可以得到:

式中:Δβ——质心侧偏角偏差,rad;
Δω˙r——横摆角加速度偏差,rad/s2;
ΔM——汽车附加横摆力矩,N·m。

基于LQG最优控制算法,对ΔM施加控制,建立系统对应的性能指标函数,如式(9)所示。

式中:q1——汽车质心侧偏角偏差的权重;
q2——汽车横摆角速度偏差的权重。
将式(9)转化为二次型形式,可以得到:


当汽车结构参数和各权重确定后,可由Riccati方程得到最优反馈矩阵K1,即:

式中:P——Riccati方程的解。
基于x(t)和K1,可以求得最优的附加横摆力矩,如式(12)所示。

2.2 纯电动汽车制动器制动力分配控制
纯电动汽车横摆力矩控制可通过制动过程中各车轮滑移率之间的分配控制来实现[7],由轮胎的力学特性可知,当车轮未发生抱死现象时,车轮的滑移率与其纵向力(制动力)近似成比例关系,故附加横摆力矩最终可通过纯电动汽车各车轮制动器制动力的分配实现。
为了得到合理可控的附加横摆力矩,采用单侧车轮制动方式对汽车各车轮的制动器制动力进行分配。若制动车轮为汽车左侧2个车轮,则可得到汽车附加横摆力矩与其左前轮、左后轮制动器制动力的关系式,如式(13)所示。

式中:Fbfl,Fbrl——左前轮、左后轮制动器制动力,N;d——轮距,m。
汽车制动过程中,若车轮的滑移率保持不变且不为1,则车轮所受的地面制动力与其垂直载荷成正比,此时车轮制动器制动力等于地面制动力,因而为了充分利用地面附着条件,根据单侧各车轮垂直载荷所占的比例实现车轮制动器制动力的动态分配,则左侧各车轮制动器制动力,如式(14)所示[8]。

式中:Fzfl,Fzrl——左前轮、左后轮垂直载荷,N。
若单独制动纯电动汽车右侧车轮,同理可得,右前轮、右后轮所需提供的制动器制动力(Fbfr,Fbrr)分别为:
综上所述,可以得到纯电动汽车ESP控制的具体流程,如图3所示。
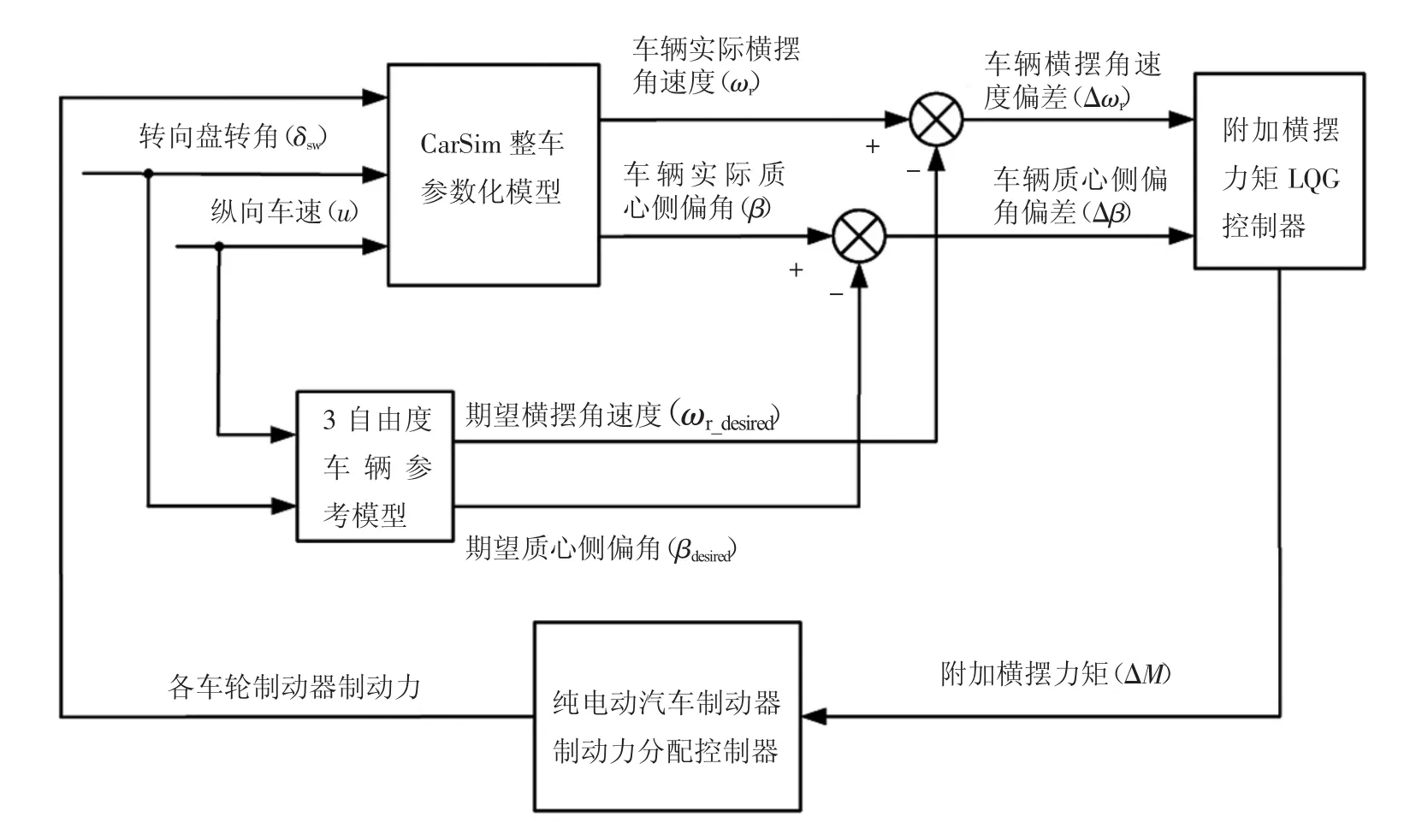
图3 纯电动汽车ESP控制流程图
3 纯电动汽车ESP控制仿真分析
ISO 3888紧急双移线工况是汽车操纵稳定性闭环控制研究中最典型的测试工况之一[9],该工况设定的汽车运行路段[10],如图4所示。
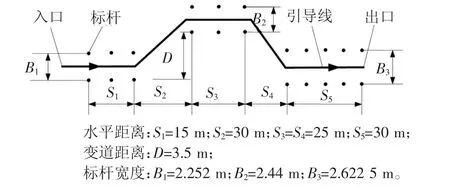
图4 ISO 3888高速紧急双移线工况的汽车运行路段
采用ISO3888紧急双移线工况对纯电动汽车高速运行时的紧急避障或移线换道工况进行仿真模拟,设定纵向车速的初始值为100 km/h,路面附着系数为0.4,仿真时间为15 s。为了验证ESP控制的有效性,将施加ESP控制的纯电动汽车与相同条件下未施加ESP控制的纯电动汽车以及车辆参考模型进行对比仿真,得到纯电动汽车横摆角速度、质心侧偏角及运行轨迹的对比曲线,如图5~图7所示。
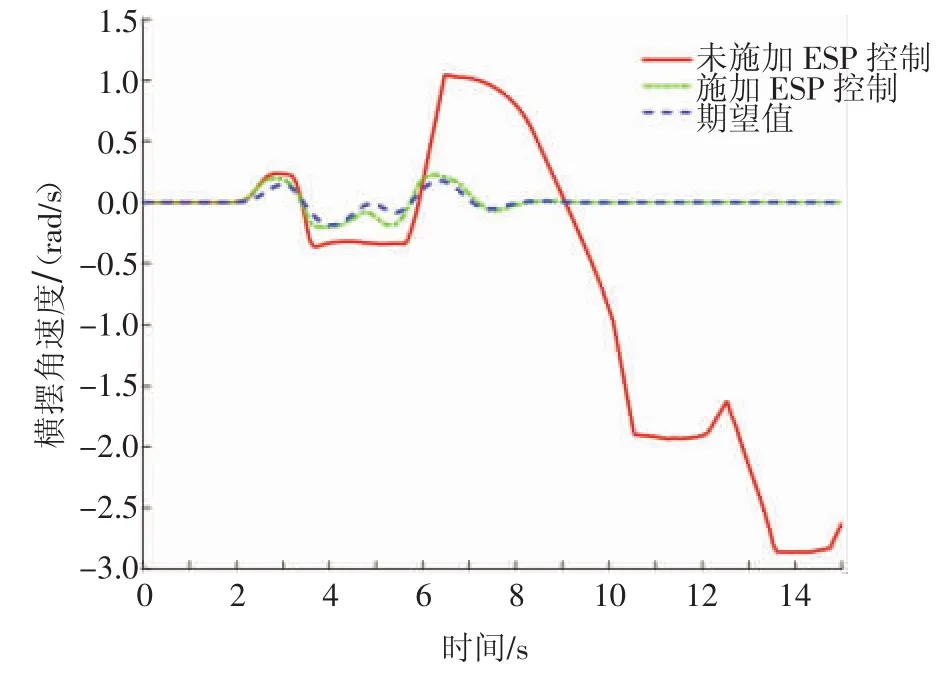
图5 纯电动汽车横摆角速度变化曲线
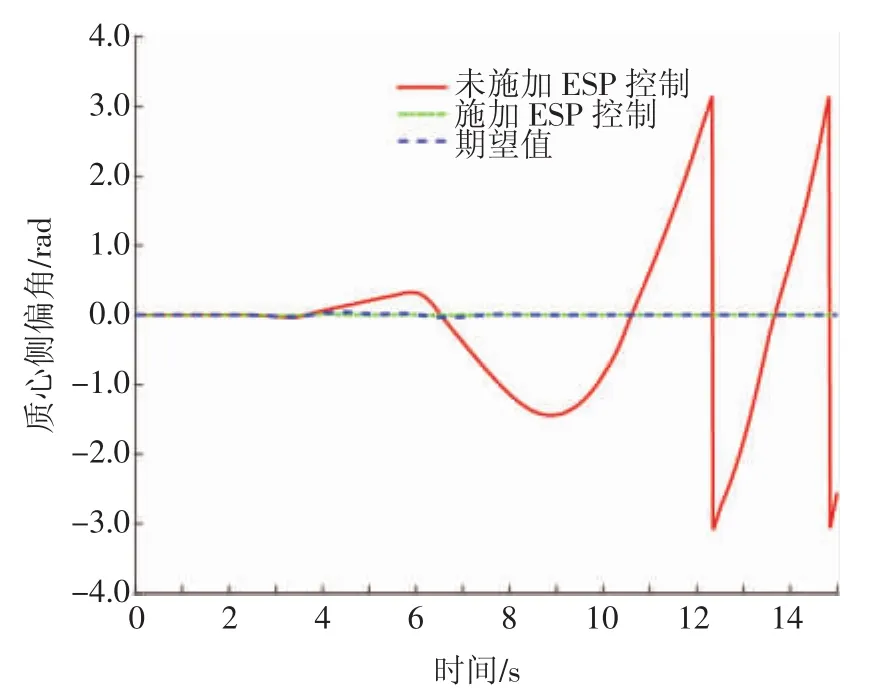
图6 纯电动汽车质心侧偏角变化曲线

图7 纯电动汽车运行轨迹
由图5可知,ISO 3888紧急双移线工况仿真前6.5 s,未施加ESP控制的纯电动汽车完成第1次移线换道,其横摆角速度大体上能跟随期望值的变化趋势,汽车未发生明显的失稳现象,而6.5 s之后,纯电动汽车进行第2移线换道,汽车横摆角速度从1.046 5 rad/s变化至-2.863 7 rad/s,显然变化幅度较大,表明汽车已出现严重的失稳现象。经ESP控制策略控制后,汽车横摆角速度在整个仿真过程中均能较好地跟踪期望值,且ESP控制后的ωr最大绝对值为0.234 9 rad/s,明显低于ESP控制前的汽车横摆角速度的幅值,表明汽车恢复到稳定运行状态。从图6可以看出,未施加ESP控制的纯电动汽车在第2次换道时发生失稳,仿真6.5 s之后,汽车的质心侧偏角变化剧烈,且变化幅度较大,其最大幅值为3.1408rad,表明汽车的运动姿态失控;而施加ESP控制的汽车质心侧偏角最大幅值为0.017 9 rad,变化比较平缓,且质心侧偏角变化趋势与期望值基本吻合,表明汽车的运动姿态得到了较好的控制和校正。分析图7可得,未施加ESP控制时,汽车第1次移线换道过程的运行轨迹大致上可以跟随期望路径,而在第2次移线换道时,汽车侧向位移变化较大,其变化范围为-3.937 6~17.044 4 m,表明纯电动汽车出现严重的侧滑现象而失稳;施加ESP控制后,纯电动汽车侧向位移的变化范围为-0.504 6~4.091 0 m,相比之下,其变化幅度显然较小,且整个仿真过程中,施加ESP控制后的汽车的轨道总方差(JE)为4.728 8,表明汽车运行轨迹基本上接近期望路径(标准双移线),轨迹跟踪能力较强。
综上分析可知,未施加ESP控制的纯电动汽车在高速移线换道或紧急避障等极限工况下其横摆角速度和质心侧偏角均有较大的波动且变化更加剧烈,汽车的操纵稳定性和行驶安全性较差。施加ESP控制可以有效地减小横摆角速度和质心侧偏角的波动程度以及降低两者的幅值,保证汽车具有良好的轨迹跟踪能力,进而提高行车的稳定性和安全性。
4 结论
针对极限工况下的纯电动汽车,设计了汽车ESP的LQG控制器,结合ISO 3888紧急双移线工况对施加ESP控制前后的纯电动汽车进行对比仿真,仿真结果验证了纯电动汽车ESP控制策略的有效性。ISO 3888紧急双移线工况下,施加ESP控制后,纯电动汽车的横摆角速度及质心侧偏角均有所减小,两者均能较好地跟踪车辆参考模型输出的期望值,且经ESP控制后的纯电动汽车运行轨迹大致上与期望路径(标准双移线)保持一致,其轨道跟踪能力较强,进而提高了纯电动汽车的操纵稳定性和行驶安全性。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
新课程·中学(2019年7期)2019-09-17
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
中学课程辅导·教师通讯(2018年10期)2018-09-04
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08