
一种可移动式天气雷达装载平台设计与分析
2018-07-10 01:26:08程海平
电子机械工程 2018年2期
程海平
(安徽四创电子股份有限公司, 安徽 合肥 230088)
引 言
机动式天气雷达在实际的应用当中对机动性的要求并不高,因此车辆的使用率相当低,但车辆的维护和使用成本却很高,给使用单位造成了一定的经济负担。为了降低雷达制造、使用和维护成本,在进行雷达结构总体设计时,考虑了在不配备雷达专用载车的情况下满足雷达可移动要求的方案。
本文详细介绍了一种可移动式装载平台的设计。该雷达主要由3个运输单元组成。其中1号单元为电子设备单元,2号单元为雷达操作方舱,3号单元为电站单元,均取消了专用载车。各单元在运输时采用普通货车且可相互独立,在到达阵地后进行安装架设时,可不需其他吊装设备的辅助,大大降低了雷达的制造和使用成本。该雷达结构总体重点设计工作在1号单元。在设计中,充分运用了先进的CAD技术、人性化工程设计技术以及自动化控制技术。整机战术、技术指标先进,结构合理,工艺先进,工作稳定可靠,雷达操作简单方便,并且系统的环境适应性强,能够满足用户对雷达的机动转场、野外试验、科学研究、业务运行等众多需求,同时大大降低了雷达的硬件成本以及维护周期和全寿命周期的使用维护成本。
1 装载平台的结构设计
该雷达为C波段全相参多普勒天气雷达,电子设备相对较多,圆抛物面天线口径为3.2 m,通过门架举升机构实现天线转台工作状态与运输状态的相互转换。
为降低对运输车辆的要求,使其在运输过程中有良好的通过性,1号单元要求整体高度尽量低,长度尽量短,宽度不超过一般车辆车厢的宽度。同时,为保障雷达的观测要求,雷达的举升高度应尽量高。没有载车的辅助,因而对平台的刚强度要求很高。
为降低架设时的复杂度,在结构设计上考虑对电子设备、举升平台和天馈系统进行一体化(1号单元)设计,形成一个可独立工作的单元。横展腿采用液压驱动的方式展开和收缩,与天线转台门架举升系统为一套动力源。调平腿收藏与横展腿收缩均为自动化,大大提高了状态转换的效率。调平方式采用手动方式,大大降低了生产制造成本。通过网络传输系统,雷达终端(2号单元)可放置在方便工作的地方。本文重点介绍了1号单元装载平台的结构设计。1号单元工作状态如图1所示。

图1 1号单元工作状态结构简图
2 装载平台的受力计算
2.1 结构设计
要求雷达能在10级风环境下正常工作,在12级风环境下不受破坏。通过设计和抗风能力计算,对底盘、方舱的重量进行了必要的增加。这种重量的增加对结构整体的刚性也是有好处的。
天线和转台的总质量为1 000 kg,底盘设计为2 000 kg,电子方舱为1 500 kg,门架质量为1 000 kg,再加上其他附助设施,1号单元设计总质量为6 400 kg,总长度小于6 m,完全满足一般货车运输承载要求。底盘采用框架式结构,全部采用钢板折弯后焊接而成。
2.2 装载平台底盘受力分析
为方便装载平台结构的刚强度分析,对1号单元进行了受力分析和结构简化。
装载平台主要承受设备的重量和风力。对电子方舱和天线转台进行简化,将计算出来的风力的具体数值直接作用在中心点上。为充分了解门架举升、底盘和支腿在不同风向下的变形,分别从X方向、Y方向和45°方向加载风力,并在不同风速下分别进行变形和最大应力分析。
天线迎风面为冲孔抛物面,风阻系数CF取1。在标准大气压下,温度为15 ℃时,风载荷计算公式可简化为:
F风=SV2/16
(1)
式中:S为风的作用面积;V为风速。
则圆形面风载荷按下面的公式计算:
F风=SV2/16=(D/2)2πV2/16
(2)
式中,D为天线直径。
将风速25 m/s、35 m/s和天线直径3.2 m代入式(2),得出2种风速工况下的风力:
F风= 3 140 N(工况1)
F风= 6 150 N(工况2)
充分考虑阵风因素和安全因素,适当取安全系数1.5。因此,在工况1下,以5 000 N的风力载荷对平台的最大变形和应力进行分析;在工况2下,以9 500 N的风力载荷对平台的最大应力进行分析。天线转台重力均设为15 000 N。
3 装载平台模型建立与分析
3.1 建立有限元模型
本次的任务是计算2种工况下的应力和变形,属于固体结构的分析范畴,而且需综合考虑计算效率和准确性,所以前处理采用Hypermesh软件,求解计算采用Nastran软件,有限元模型构建均基于这些软件。
由于该平台结构较复杂,为了更好地分析其结构,特别是底盘及举升平台各部分受力及位移情况,需要在建立有限元模型时在不影响计算结果的情况下对结构进行一些合理的简化,如图2所示。把结构框架之间的焊接处简化成节点连接,且假设各节点间的连接为刚性;把对结构分析无影响和不关心的结构分别简化为等效集中质量作用在其约束结构上;对厚度和长度比大于1∶10的板材采用壳单元模拟,小于1∶10的结构采用六面体单元模拟。

图2 整体结构图
平台和举升结构均由等厚度板材相互焊接而成,均采用壳单元模拟;将天线转台单元简化成与其质量对应的mass单元;各板材之间的焊接关系采用壳单元和梁单元,并配合RBE2和RBE3单元来模拟真实的焊接关系。有限元模型共计236 244个单元,235 242个节点。
3.1.1材料
全部结构采用Q345材料,其应力应变曲线如图3所示。材料的弹性模量为210×109Pa,泊松比μ= 0.3,密度ρ= 7 850 kg/m3,理论屈服极限为345×106Pa,实际测得的断裂强度为890 MPa,断裂延伸率为25%。
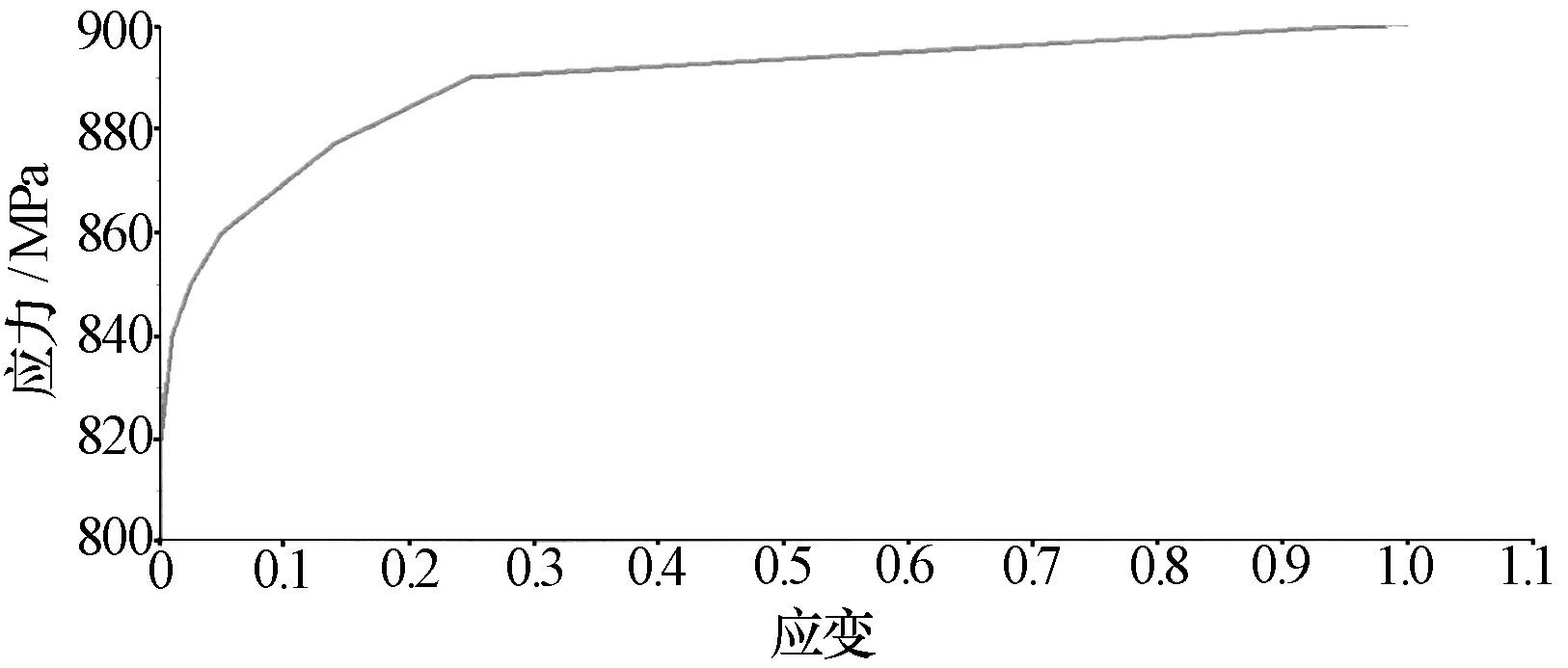
图3 Q345应力应变曲线
3.1.2载荷和约束的处理方法
在完全展开的状态下,约束支撑腿在3个方向的平动和在3个方向的转动自由度,按照2种风速工况,在3个方向分别进行风力加载和计算。
3.2 工况1,10级风工作风速计算结果
在正常工作风速下,主要分析平台的变形是否影响雷达的正常观测精度。根据雷达技术指标要求,举升平台的水平误差及扭转角度应不大于3′。为全面分析装载平台在来自不同方向风作用下的稳定性,风力加载主要考虑长度方向(X轴)、宽度方向(Z轴)和45°夹角方向。经分析得知,在Z轴方向应力和变形均最大,因此,本文详细给出了风力在该方向的分析结果。按照Z轴方向加载风载荷时,得到的应力分布云图如图4所示,最大应力为221 MPa,该最大值没有超出材料的屈服强度。
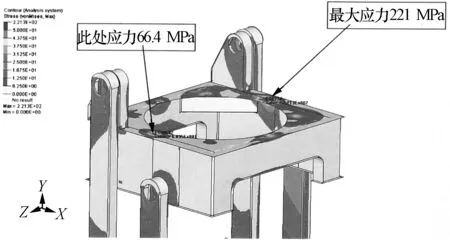
图4 局部应力图
位移云图如图5所示,天线中心变形为10.65 mm,天线座最大变形为8.74 mm。经计算满足正常工作设计要求。

图5 整体变形云图
沿X轴方向加载风力,计算结果见表1。沿45°方向加载风力,计算结果见表2。

表1 X轴方向计算结果

表2 45°方向计算结果
3.3 工况2,12级风不破坏计算结果
要求雷达在12级风工况下不受破坏。本文只给出在该风速下在不同方向风载荷作用下的最大应力值。
通过计算分析得出以下结果:按照X轴加载35 m/s风载荷时,得到的最大应力为312 MPa;按照Z轴加载风载荷时,得到的最大应力为324 MPa;按照45°方向加载风载荷时,得到的最大应力为283 MPa;最大应力位于举升平台与底盘的连接处,如图6所示,均没有超出材料的屈服强度,不会产生破坏,满足结构设计要求。最大变形云图如图7所示,举升平台上最大变形为16.03 mm。

图6 局部最大应力云图
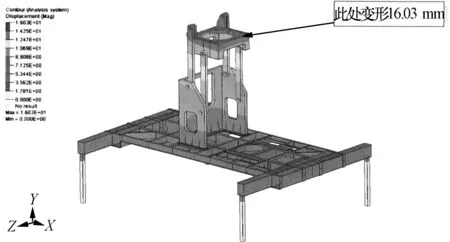
图7 最大变形云图
4 结束语
本文针对当前为可移动式天气雷达配备的专用载车实际使用率低、使用维护成本高的现象提出了一种有效的解决方案。对电子设备与天馈系统进行一体化设计,实现了雷达无固定载车可移动的要求,使该雷达开展机动实验方便快捷,还大大降低了雷达的制造成本和使用维护成本。通过合理的结构设计,再利用力学分析软件进行刚强度的分析与优化,确保了系统在各工况下满足雷达的使用要求。
对实物进行实际测量和使用验证,结果表明该雷达的装载平台设计是成功的,完全满足雷达的使用要求,并取得了较好的经济效益和社会效益。其设计思想对同类产品的结构设计具有一定的参考价值。对平台调平等进行进一步研究,采用机电一体化设计,进行自动化控制,可满足无固定载车雷达的高机动性要求。
参考文献
[1]陈世荣, 季汉忠, 常继根. 车载雷达平台的优化与仿真[J]. 电子机械工程, 2016, 32(5): 57-60.
[2]程海平. 某雷达转台翻转机构一体化设计与分析[J]. 电子机械工程, 2008, 25(4): 18-21.
[3]李钊, 王志海. 大型车载雷达抗风稳定性研究[J]. 电子机械工程, 2015, 31(3): 11-15.
[4]朱海波. 机动式多普勒天气雷达结构总体设计[J]. 电子机械工程, 2006, 22(3): 34-38, 61.
[5]张润逵, 戚仁欣, 张树雄, 等. 雷达结构与工艺[M]. 北京: 电子工业出版社, 2007.
[6]成大先. 机械设计手册[M]. 北京: 化学工业出版社, 2003.
[7]叶尚辉, 李在贵. 天线结构设计[M]. 北京: 西北电讯工程学院出版社, 1986.
猜你喜欢
大自然探索(2023年7期)2023-08-15 00:48:21
中学生数理化·八年级物理人教版(2023年6期)2023-05-25 11:59:36
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:24
中国交通信息化(2017年10期)2017-06-06 07:13:20
山东工业技术(2016年15期)2016-12-01 05:31:27
电子制作(2016年1期)2016-11-07 08:42:54
学习月刊(2016年19期)2016-07-11 01:59:46
火控雷达技术(2016年3期)2016-02-06 02:30:26
百科探秘·航空航天(2015年4期)2015-11-07 07:04:34
现代防御技术(2014年6期)2014-02-28 18:26:38
