
一种电气零件标识面智能识别装置
2018-07-04 05:58:16黄和平
机械制造与自动化 2018年3期
黄和平
(乐清兆泰机电有限公司,浙江 温州 325608 )
0 引言
现有的CCD摄像视觉检测识别基本上是在静态下具有较佳的效果,在动态情况下,检测效果达不到零错判、零漏检,主要存在以下几个问题:
1) 广泛应用在相对慢速或静态的日常作业、监控识别与质量检验中,采用的技术为快速图像匹配算法[1]。例如图像匹配、模板匹配、SSDA、投影匹配等,由于计算量大、耗时长、速度慢、实时性差,无法应用到高速运动场合。所以,现有的软件识别检测连续动态运动产品、漏检和错判率保持相当高的比例,使其不能实施和应用。
2) 广泛应用的交通车辆牌照相距一定间隔的动态检测识别,经常采用模板字符匹配模式识别[2],其错判率在3%~10%。
3) 目前现有的高低压开关中,如断路器、继电器中电磁脱扣和触头系统中的双金(双金属片)、触头与触点、触点与接触板、前采用机械触摸式检测、光电追色开关检测等装置检测,则存在安装调试难、检测精度不高、检测速度慢和检测不稳定的问题。笔者经过多年的潜心研究与实践优化高斯拉普拉斯图像边缘检测算法,为工业生产之需提供一种准确率高、效率高的可自动识别高低压电磁脱扣和触头系统的触头及双金标识面的识别方法和装置。
1 系统装置结构与原理
电气零件标识面智能识别装置是由设置在电气触点/双金等产品的自动化输送、气吹分拣与传送图像的CCD摄像(charge-coupled device,电荷耦合元件)组成的智能识别装置,PLC控制器控制CCD摄像图像基于计算机边缘检测算法与处理识别控制模块的硬件,及PLC控制器控制的可对产品与识别参数设定、调试、在线动态智能识别与分拣连续运动的触点/双金等产品标识面的可视化智能显示窗口构成基于图像识别触点/双金标识面的识别系统。
1.1 CCD智能识别装置
图1、图2为“触点/双金标识面的识别装置”,其结构如下:在支架2上装有CCD摄像模块4,下方安装伞型聚光灯3,在振盘7的传送轨道上、与3个识别区域窗口8、9、10对应的位置上设有可将触点/双金吹落到振盘中的3个吹气孔,即识别到反面标识面排除部的吹气孔1、5、6构成CCD智能识别装置。
1.2 识别装置的可视化智能显示窗口
如图2所示该装置还包括触点标识面识别装置的可视化智能显示窗口,除上半部显示CCD摄像模块4拍摄区域外,下半部显示标识面识别系统设置和控制区。可见标识面识别系统具有较多的设置功能。如采用吹气方案时,3个识别区域窗口8、9、10分别与3个吹气孔1、5、6的位置关系与吹气孔的吹气延时有关联,可在识别区域窗口设定后对相应的吹气延时时间进行调整,可通过设置键13的框架长度和框架宽度按钮来设置检测窗口3个识别区域窗口8、9、10的长和宽。通常识别区域窗口的面积在触点/双金的待检测面面积的80%~99%之间,如98%;可通过设置键14设置3个识别区域窗口8、9、10对应1号、2号、3号定位精度;通过按键20的X轴偏移和Y轴偏移按键调整3个识别区域窗口8、9、10的位置偏移,通过按键17的参数设置调整更多的参数、保存参数与单次检测功能键;可通过设置键15设置1号定位、2号定位与3号定位;可通过设置键16显示设置窗口8、9、10中计算机识别图像的在线正面或反面;窗口18从上往下依次显示:正常(异常)、总产量、不良数、清理数;通过按键17设置调节每个定位号的灰阶比例、PC与PLC通讯端口的选择、1号吹气键、2号吹气键、3号吹气键、开始检测键、停止检测键、退出检测键的设置构成。
1.3 标识面识别系统硬件结构组成
如图3所示,标识面识别系统包括在CCD摄像模块4摄像范围内确定识别区域窗口判定触点/双金进入窗口设定模块的到位检测模块,对识别区域内图像进行高斯拉普拉斯边缘识别处理的图像处理模块,基于图像处理模块输出进行标识面识别的控制模块;窗口设定模块、到位检测模块、图像处理模块与识别控制模块连接。标识面识别系统还包括与外部通讯,可输出标识面判定结果的通讯接口模块,用于显示识别情况和输入的显示模块,通讯接口模块、输入和显示模块与识别控制模块连接。在识别开始前,通过窗口设定模块在CCD摄像模块的固定摄像区域内,对应传送触点/双金的传送轨道区域内设置第一识别窗口,其窗口的长宽均小于触点/双金的待检测面的长宽。在识别开始前还应根据需要设置其他相应的参数,设置参数包括用于进行识别的阈值等。识别开始后,到位检测模块判定触点/双金进入第一识别窗口后标识面识别系统通过CCD摄像模块得到触点/双金上表面的待识别图像;图像处理模块对第一识别窗口内的待识别图像进行高斯拉普拉斯算子图像边缘识别得到边缘分割图像;识别控制模块将边缘分割图像内的每个像素点的灰度值与设定的亮点阈值比较,得到大于或大于等于亮点阈值的像素点的总数为最大灰阶面积An,将最大灰阶面积An和边缘分割图像中像素点总数即图像总面积Rn的比值,与标识面阈值进行大小比较可判定当前触点/双金的上表面是否为标识面。

图3 标识面识别系统硬件结构框图
2 系统结构配置
2.1 边缘检测算法建立图像处理模块
标识面识别系统的图像处理模块可对图像进行高斯拉普拉斯边缘识别,对图像进行平滑去噪和二值化处理,可有效滤除相关干扰,有效识别图像边缘。图像处理模块可基于软件实现也可采用专用的图像处理芯片。
1) 图像局部变化的重要特征,以不连续性的形式出现,通常用方向和幅度描述图像的边缘特性。一般来讲,沿边缘走向的像素变化平缓,而垂直于边缘走向的像素变化剧烈。基于边缘检测的基本思想是先检测图像中的边缘点,再按一定策略连接成轮廓,从而构成边缘图像。拉普拉斯算子为二阶差分,拉普拉斯算子是各向同性的微分算子,具有旋转不变性,从而满足不同走向的图像边界的锐化和检测要求。用拉普拉斯算子检测边缘就是估算拉普拉斯算子的输出,找出它的零点位置,也就是检测图像的边缘位置。但是拉普拉斯算子在边缘处会产生一个陡峭的零交叉,其方向信息丢失,常产生双像素,对噪声有双倍加强作用,因此拉普拉斯算子很少直接用于边缘检测。图像边缘有大的灰度变化,所以图像的一阶偏导数在边缘处有局部最大值或最小值,则二阶偏导数在边缘处会通过零点(由正到负或由负到正)。
如果把基于高斯算子的高斯平滑滤波器和基于拉普拉斯算子的拉普拉斯锐化滤波器结合起来,因为图像中包含噪声,平滑和积分可以滤掉这些噪声,消除噪声后再进行边缘检测(锐化和微分),就会得到较好的效果。
高斯拉普拉斯图像边缘识别的公式如式(1)所示[3]:
h(x,y)=▽2(f(x,y)×G(x,y))=f(x,y)×▽2G(x,y)
(1)
其中,x、y为图像的横坐标和纵坐标,f(x,y)为原始图像,G(x,y)表示滤波函数,▽2表示拉普拉斯运算;h(x,y)为高斯拉普拉斯图像边缘识别正负二值化后的分割增强图像。高斯-拉普拉斯图像边缘识别就是先对图像进行高斯模糊,然后再求二阶导数,二阶导数等于零处对应的像素就是图像的边缘。
▽2G(x,y)被称为LOG滤波器,▽2G(x,y)的等价公式为:
(2)
高斯拉普拉斯算子模板,模块宽度w为5(常用的高斯拉普拉斯算子是5×5的模板,本发明给的是5×4的模板,5×5可能也适用)。
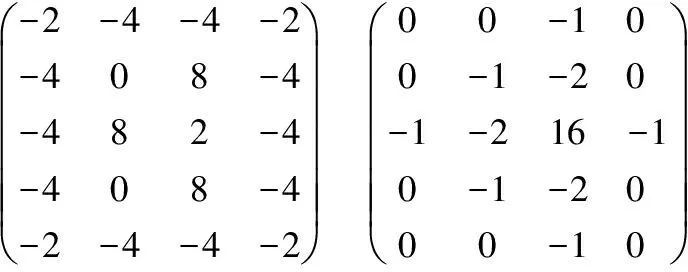
(3)
图像边缘二侧的象素经过高斯拉普拉斯算子计算后,低灰度值侧h(x,y)>0,高灰度值侧h(x,y)<0,求取h(x,y)中的零穿点轨迹即可得图像g(x,y)的边缘。
2) 图像边缘检测算法判断方法:对于LOG滤波器的δ值选取与模板宽度w有关,如果w相对于δ取得小,则边缘位置精度高,但检测出来的细小变化也要多;如果w相对于δ取得大,则检测出来的边缘位置会偏离真实边缘过大,且会滤掉一些重要的细节部分。w与δ取值按式(4)计算,其中INT为取整运算:
(4)
基于高斯拉普拉斯算子的图像边缘效果过程如图4、图5、图6所示,其中高斯滤波器的标准方差为3,检测边缘宽度为9。

图4 触点图像边缘图
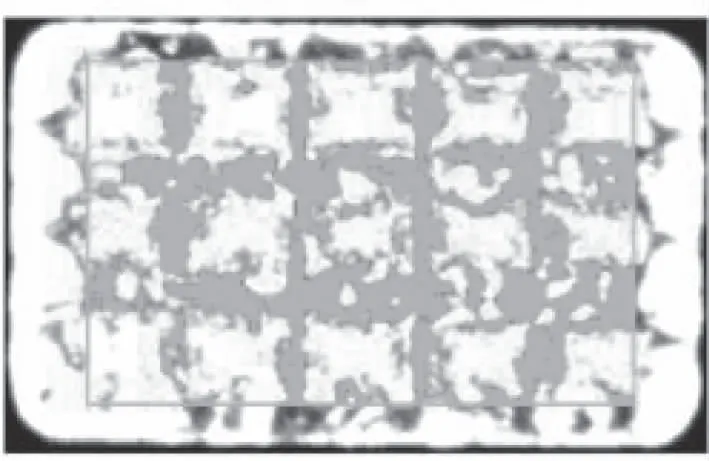
图5 触点图像边缘处理图
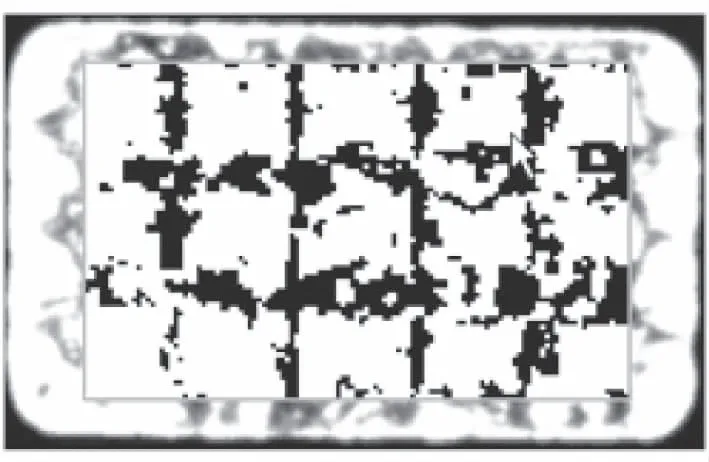
图6 触点图像边缘效果图
2.2 到位检测模块
标识面识别系统在到位检测模块判定触点/双金进入第一识别窗口后,标识面识别系统通过CCD摄像模块得到触点/双金上表面的待识别图像;图像处理模块对第一识别窗口内的待识别图像进行高斯拉普拉斯算子图像边缘识别得到边缘分割图像。识别控制模块基于得到的边缘分割图像判定当前触点/双金的上表面是否为标识面,识别控制模块将边缘分割图像内的每个像素点的灰度值与设定的亮点阈值比较,得到大于或大于等于亮点阈值的像素点的总数为最大灰阶面积An。当最大灰阶面积An小于设置的跳变点阈值时,将最大灰阶面积An边上2~15像素范围内的像素点灰度值与低灰度阈值比较,得到大于或大于等于低灰度阈值的像素点的总数即低灰度面积SL;将低灰度面积SL与原最大灰阶面积An相加得到新的最大灰阶面积An,原最大灰阶面积An也可称为高灰度面积SH。将最大灰阶面积An和边缘分割图像中像素点总数即图像总面积Rn的比值与标识面阈值进行大小比较,可判定当前触点/双金的上表面是否为标识面。灰度值的变化范围在 0~255,触点/双金的亮点阈值经验值在 95~105,低灰度阈值的一般设置在 75~105,低灰度阈值小于亮点阈值。标识面阈值一般设置在 40%~70%,如设为 50%,Kn=An/Rn,当Kn≥50%时为可判定为反面,当Kn<50%时可判定为正面。当然所谓的标识面是相对的概念,标识面可制定为正面,也可制定为反面。
3 实例
标识面识别系统与PLC控制器连接,当在对应的识别区域窗口8、9、10检测到上表面为非标识面的触点/双
金时,标识面识别系统给PLC控制器发送剔除控制信号,PLC控制器控制对应的吹气孔吹气,将触点/双金吹落到振盘中重新选择排序正反面。排除部还可以不采用吹气孔的方式,而采用可吸取触点/双金进行翻转的电磁阀机械手。排除部包括设置在振盘 7 的传送轨道旁的可吸取触点/双金进行翻转的电磁阀机械手和推进气缸,PLC控制器可控制推进气缸驱动电磁阀机械手吸取触点/双金并进行翻转。实施例中标识面识别系统可对样件进行定点拍摄输出样件进行高斯拉普拉斯边缘识别处理后各像素点灰度值情况和其他参数,便于开始识别前参数和各阈值的设置。表1为小白点银点式触点正反面分别作为标识面识别的相应检测参数和结果。

表1 检测参数和结果
4 结语
触点标识面的识别装置与系统可实现触点标识面的动态识别,识别过程与传送过程同步进行,不需要触点进行定点的拍摄识别,大大提高了识别效率,有效地提高了加工生产效率。实验结果表明该系统适用于工业高速系统应用场合。
[1] 姜凯,陈海霞,汤建华. 一种快速图像匹配算法的设计与实现[J]. 计算机工程与应用, 2004,4(11):87-89.
[2] 汪岳. 智能交通系统中车牌识别与车型检测的研究[D]. 兰州:兰州理工大学学报,2007:48-50.
[3] 黄剑玲,邹辉. 基于高斯 Laplace 算子图像边缘检测的改进[J] . 微电子学与计算机, 2007(9): 156-157 .
猜你喜欢
武汉广播影视(2022年6期)2022-12-28 06:38:12
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
军民两用技术与产品(2020年8期)2020-09-07 13:37:18
自动化学报(2017年5期)2017-05-14 06:20:56
光学精密工程(2016年1期)2016-11-07 09:01:59
现代计算机(2016年11期)2016-02-28 18:35:21
中央民族大学学报(自然科学版)(2014年2期)2014-06-09 08:28:14
郑州大学学报(理学版)(2014年3期)2014-03-01 04:21:01
上海理工大学学报(2012年5期)2012-03-20 13:55:07
