
基于ADAMS的双足机器人建模仿真方法
2018-06-28 02:52,,,
石家庄铁道大学学报(自然科学版) 2018年2期
, , ,
(石家庄铁道大学 电气与电子工程学院,河北 石家庄 050043)
0 引言
随着社会的进步,地震、火灾等自然灾害救援受到越来越多人的关注,而现有的交通工具受应用场合限制,在救灾现场很难发挥更大的作用,人类对交通工具有了更高的要求。此外,随着机器化大生产的出现,机器人在提高生产力方面也发挥着不可替代的作用[1]。
首先结合对人的腿部关节及肌肉运动的生理分析,设计了十六自由度小型双足机器人。基于D-H方法和ZMP稳定约束构建数学模型推导出机器人的正运动学方程,进而求得机器人的逆运动学解。其次,在SolidWorks中建立双足机器人的三维几何模型,并导入到ADAMS中,建立机器人的虚拟原理样机,实现虚拟样机系统的联合仿真。
1 双足机器人三维模型绘制
SolidWorks是专业的三维机械设计软件,擅长建立精确的三维几何模型,并可以编辑材料、测量质量[2-4]。自1995年问世以来,以其优越的性能极大地提高了机械工程师的设计效率,成为三维机械设计软件的典范。建立双足机器人虚拟样机模型的过程如下:
(1)首先绘制每个零件的草图,再通过拉伸、切除等操作绘制出三维模型,零件模型如图1所示,分别为U型支架、舵机、舵盘、脚板、手和云台支架。

图1 零件模型
(2)设置各零件间的位置配合关系,组装成机器人三维模型,使其为站立姿势,即双足机器人的初始位姿,如图2所示。
2 建立ADAMS机器人虚拟样机
ADAMS即机械系统动力学自动分析,是美国机械动力公司开发的虚拟样机分析软件。它提供直接面向用户的基本操作对话环境和虚拟样机分析的前处理功能,可实现样机建模、数据输入、数据导出、参数设置、运行函数、程序接口和其它辅助功能等。虚拟样机建立过程如下:
(1)利用SolidWorks和ADAMS的接口模块Mechanical/pro将模型导入ADAMS;
(2)在ADAMS中绘制地板和楼梯;
(3)对各零件添加运动副;
(4)添加各关节间的旋转驱动;
(5)设置材料密度、重力、摩擦因数等参数;
(6)建立机器人双脚和地面之间的接触模型,添加摩擦力。ADAMS虚拟样机如图3所示。此虚拟样机模型共包括74个零件、38个固定副、17个旋转副和左右脚与楼梯及地面间的接触。

图2 组装机器人三维模型

图3 ADAMS机器人虚拟样机
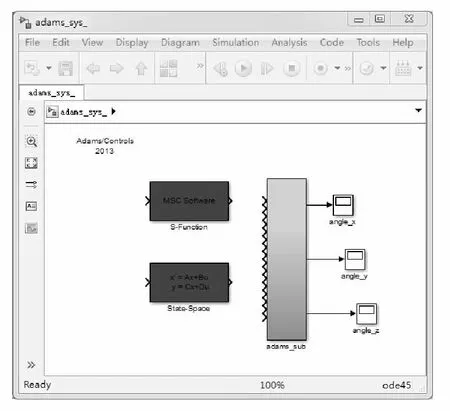
图4 ADAMS虚拟样机在Simulink中的模型
3 建立双足机器人虚拟样机控制系统
利用ADAMS/Controls模块把Matlab控制系统连接到ADAMS机器人虚拟样机驱动中,如图4所示为ADAMS虚拟样机在Matlab/Simulink中的模型。在Matlab中根据ZMP经典理论、D-H算法及人工神经网络[5-6],计算出机器人上楼梯过程中各关节转角与机器人位姿的关系,利用人工神经网络模块NN Predictive Controller模块建立机器人控制系统,如图5,以机器人关节转角为输入变量、躯干倾斜角为输出变量,实现ADAMS与Matlab的实时数据交换并进行仿真[7-8],仿真结果如图6。

图5 机器人控制系统
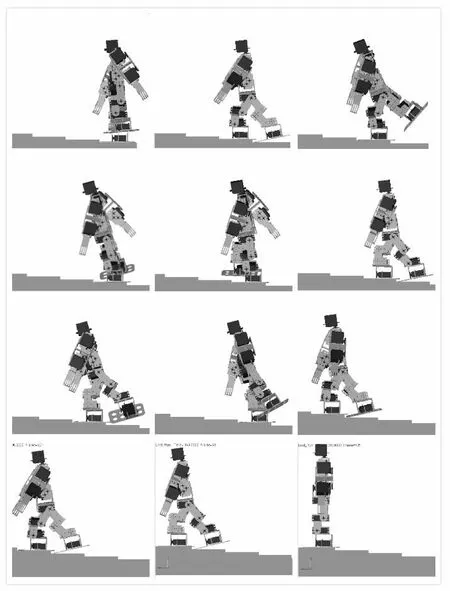
图6 机器人虚拟样机上楼梯仿真图
4 仿真结果分析
利用ADAMS/PostProcessor模块分别绘制躯干和两脚踝的运行轨迹,结果如图7,两脚踝呈规律性前进,躯干前后波动以保持平衡。两脚踝X、Y、Z3个方向的位移-时间图像,如图8~图10。由此可见,机器人行走过程中有轻微抖动,但整体较平稳,此控制系统可实现机器人上楼梯步态规划,可以应用在工程实践中,有利于实际生产中降低成本、优化样机。
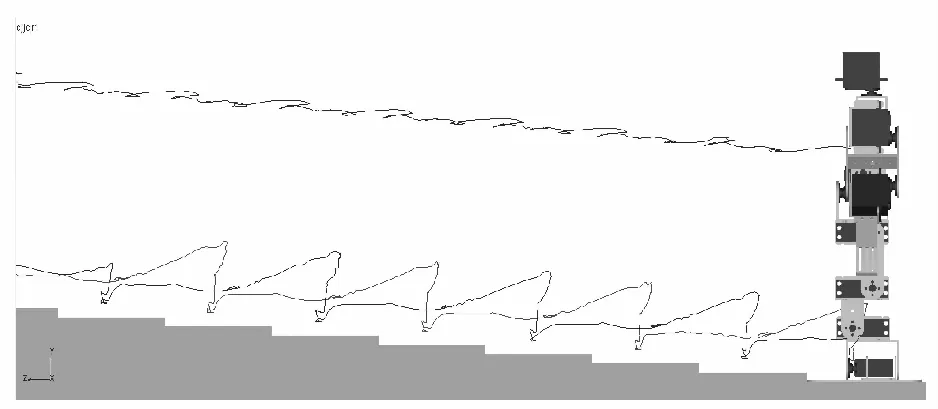
图7 虚拟样机躯干和脚踝运动轨迹
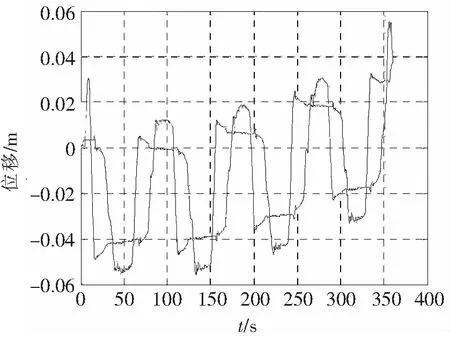
图8 机器人脚踝X方向位移
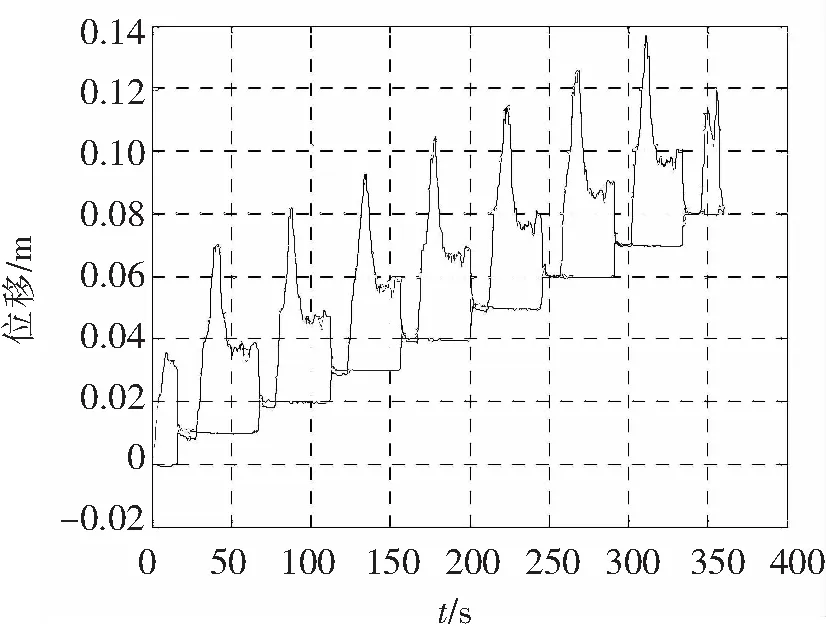
图9 机器人脚踝Y方向位移

图10 机器人脚踝Z方向位移
5 结语
该方法首先用三维制图软件SolidWorks建立机器人的三维几何模型,然后导入动力学仿真软件ADAMS,建立机器人的机械系统虚拟原理样机。再应用专业控制仿真软件Matlab进行机器人控制系统设计与仿真,通过ADAMS/Controls接口模块,建立起与机械系统虚拟样机间的实时数据通信管道,实现高精度的虚拟样机系统的联合仿真和实验数据分析。同时,无需在物理样机上反复试验,大大提高了工作效率,节约了成本。
参 考 文 献
[1]柯显信.仿人形机器人双足动态步行研究[D].上海:上海大学,2005.
[2]牛欢,贺斌,杨杰,等. 基于ADAMS与MATLAB的关节型机器人联合仿真研究[J]. 青岛大学学报:自然科学版,2016,29(3):83-88.
[3]胡凌云,孙增圻. 双足机器人步态控制研究方法综述[J].计算机研究与发展,2005, 42(5):728-733.
[4]杜永忠,平雪良,何佳唯,等. 基于ADAMS的机器人系统仿真技术研究[J].工具技术,2013(12):3-7.
[5]刘凯,牛江川,申永军,等. 基于遗传粒子群算法的堆垛机作业路径优化[J].石家庄铁道大学学报:自然科学版,2016,29(2):67-71.
[6]乔丰立,王艳莉,焦嘉宁. 基于Simulink模型的先导式溢流阀动态特性仿真方法[J].石家庄铁道大学学报:自然科学版,2016,29(3):87-92.
[7]李国勇.智能控制及其MATLAB实现[M].北京:电子工业出版社,2005.
[8]董慧颖.机器人原理与技术[M].北京:清华大学出版社,2014.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
家庭医药(2021年18期)2021-12-03
数学小灵通·3-4年级(2021年5期)2021-07-16
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
养生保健指南(2019年4期)2019-12-17
中国棉花(2017年10期)2017-11-04
小天使·一年级语数英综合(2016年4期)2016-11-19
Coco薇(2015年5期)2016-03-29
读者·校园版(2015年16期)2015-05-14
