基于加速粒子群算法的车辆座椅悬架最优控制研究
2018-06-25 02:40侯力文孙玲玲
噪声与振动控制 2018年3期
刘 杉,孙 琪,侯力文,牛 宁,孙玲玲
(山东大学 机械工程国家级实验教学示范中心,济南 250061)
车辆行驶中,路面激励经轮胎、悬架衰减后传至车身。由于悬架及轮胎的结构设计需综合考虑整车的行驶性能,特别是行驶稳定性要求,故参数和结构优化受限[1]。通过引入参数可调的主动悬架系统[2–7]虽能在保证行驶稳定性的前提下,一定程度上提升行驶平顺性,但因硬件要求高、能耗大且成本昂贵,除少数高端车型外并未得到广泛使用。研究表明,多数乘用车在经一二级隔振后,司乘人员仍旧暴露在低频高强度振动下,长期如此会造成内脏器官及脊椎系统的损伤[8–9]。座椅作为直接与司乘人员相连的最终隔振环节,对其进行优化设计既不影响整车行驶性能,又便于实现,是提高乘坐舒适性的有效手段。
采用新型坐垫材料[10]能够一定程度上衰减传入人体的振动,但受制于软垫自身结构特性,仅能在高于坐垫固有频率时起到一定隔振作用。近年来,出现的由弹簧、减振器组成的座椅悬架系统[11],虽能进一步衰减高频振动,但同时导致低频段隔振能力恶化。随着控制理论与电子技术的发展,车身主动悬架技术日趋成熟,相关控制策略,如最优线性二次型控制(LQR)[12–14],也开始被应用于座椅悬架系统中。LQR控制性能的优劣取决于目标函数中的加权矩阵,但常见控制器中加权矩阵往往由设计者权衡各设计目标后,根据经验确定,通常无法实现全局最优。且部分座椅悬架系统设计中仅以人体垂向加速度为评价指标,忽略了座椅悬架限位行程、悬架动挠度及轮胎动载荷等因素,不符合工程实际。
随着群体仿生智能的发展,基于人工智能确定加权矩阵的控制器开始出现,如基于遗传算法(GA)的最优线性二次型控制等。粒子群算法是一种基于群体智能的随机寻优算法,与目前应用广泛的遗传算法相比,具有收敛快、优化效率高等优点。但传统粒子群算法在面对有约束的复杂问题时,寻优能力较差。
本文针对座椅悬架系统进行了参数优化及最优主动控制。建立“车轮-车身-座椅、人体”6自由度隔振系统模型,利用改进的加速粒子群算法(acceleration based PSO,APSO)[15],通过选取恰当的加速系数,提高了传统算法中粒子随机性,在保证座椅、车身悬架在正常限位内工作的条件下,实现对座椅悬架参数的全局寻优,通过与传统粒子群优化系统的比较,验证了APSO的可行性。并在参数优化系统基础上,进行最优线性二次型(LQR)主动控制,控制器加权矩阵由APSO寻优确定。将基于APSO的LQR控制系统中“座椅、人体”垂向加速度与基于GA的LQR系统对比,验证了基于APSO算法的LQR主动座椅悬架的隔振性能。
1 “车轮-车身-座椅、人体”隔振系统参数优化
针对坐姿人体在垂向最敏感频率段(4 Hz~12.5 Hz)耐受性差的问题[9],对座椅悬架进行参数优化以衰减人体垂向加速度。假设车辆匀速行驶且左右激励对称,忽略车厢底板和座椅的弹性变形,仅考虑车身的垂向、俯仰运动与座椅的垂向运动,建立如图1所示“车轮-车身-座椅、人体”6自由度半车隔振系统模型。
图中:m1,m2为前后车轮质量,mb,Ib为车身质量及转动惯量,mcf,mcr为驾驶员及后排“座椅、人体”质量,q1,q2为表示路面输入的滤波白噪声,x1f,x1r为车轮垂向位移,xb,θb为车身质心处垂向位移与俯仰角,xbf,xbr为车身对应悬架处垂向位移,x1,x2为车身对应驾驶员及后排座椅处垂向位移,xcf,xcr为驾驶员与后排处“座椅、人体”垂向位移,k1f,k1r为前后轮胎刚度k2f,k2r,c2f,c2r为前后车身悬架刚度与阻尼k3f,k3r,c3f,c3r为驾驶员及后排座椅悬架刚度与阻尼Uf,Ur为主动座椅悬架作动力a,b为车身质心至前后轴距离l1,l2为车身质心至驾驶员及后排座椅距离。
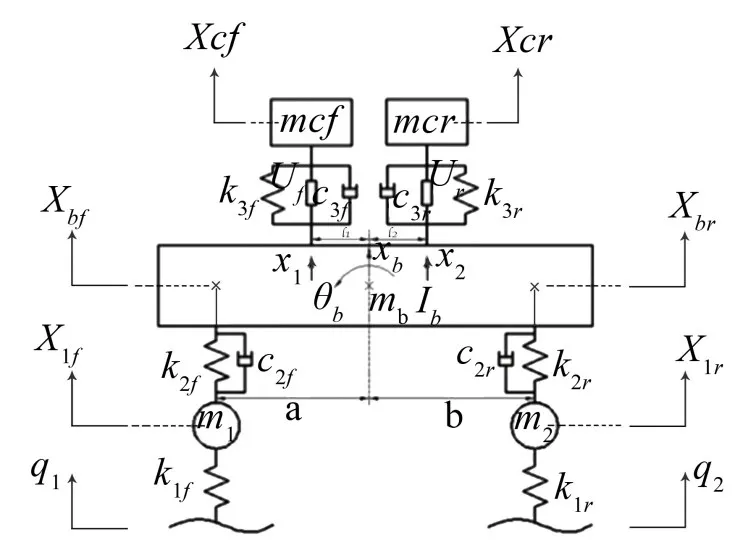
图16自由度半车隔振系统模型
根据牛顿第二定律,建立系统的动力学方程为
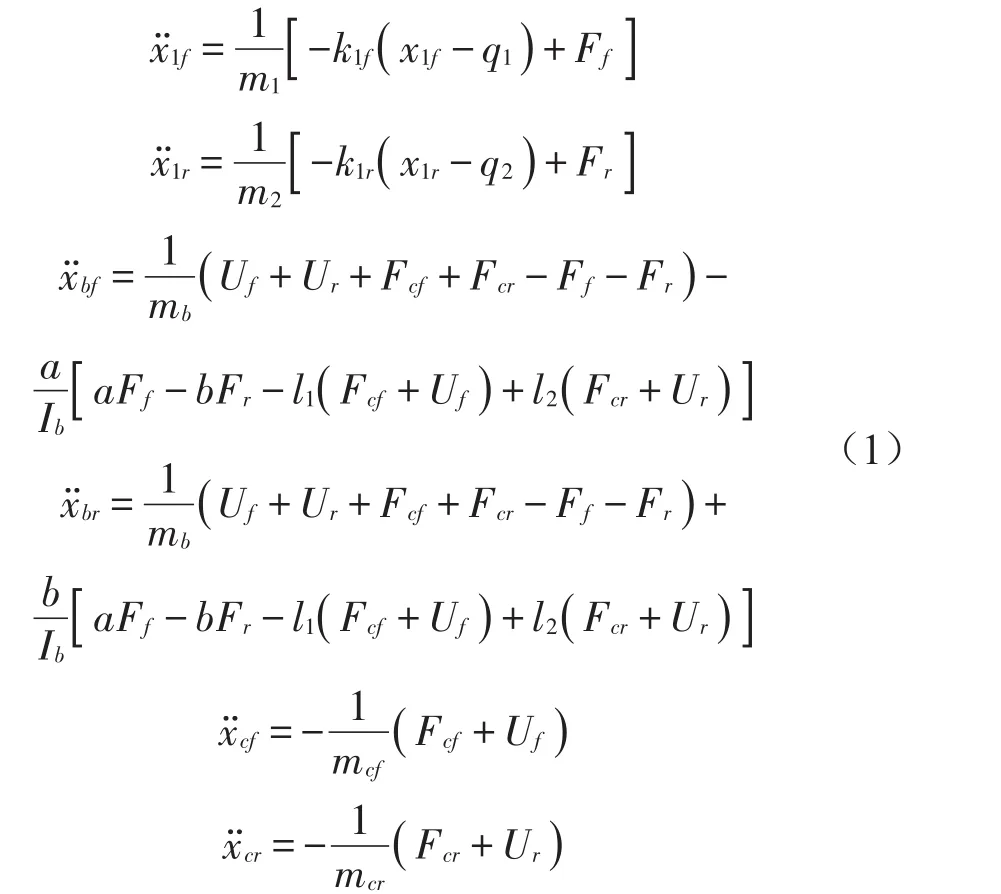
其中:Ff,Fr与Fcf,Fcr为前后车身与座椅悬架力,由于参数优化系统为被动座椅悬架系统,无外接作动器,故Uf=Ur=0。
选取某轿车实测参数,见表1。
取系统的状态变量与输出变量为
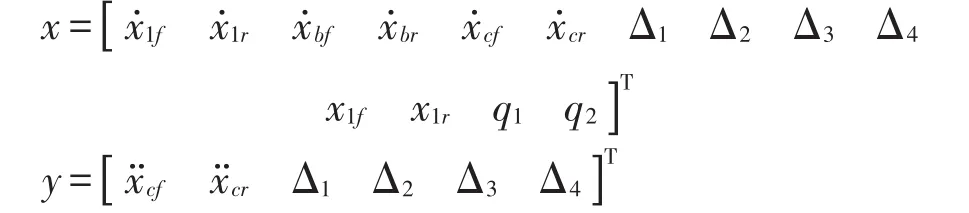
其中:Δ1=xbf-x1f、Δ2=xbr-x1r为车身前后悬架动行程,Δ3=xcf-x1、Δ4=xcr-x2为驾驶员及后排座椅悬架动行程。
根据系统的状态变量及输出变量,可将动力学方程式(1)改写为如下状态空间表达式

式中:ω为系统过程噪声,有ω=[W1W2]T,其中W1和W2为单位白噪声。系统矩阵A,扰动矩阵F,输出矩阵C均可根据系统动力学方程式(1)求得。本文选取车辆在C级路面上以u=20 m s车速行驶的路面激励条件作为系统的有效输入,存在
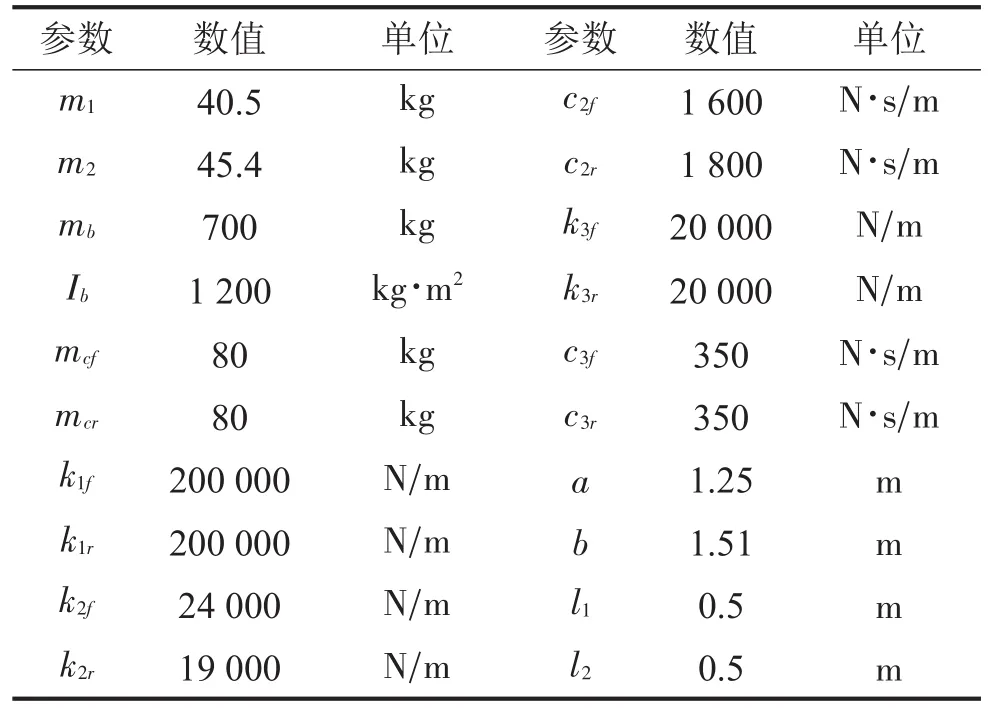
表1 模型结构参数

其中:下截止频率f0=0.22,参考空间频率n0=0.1,C级路面不平度系数Gq(n0)=256×10-6。
由于引入座椅悬架系统,在衰减高频振动的同时导致低频段“座椅、人体”垂向加速度大于车身垂向加速度。为提升低频段座椅悬架隔振性能,对初始座椅悬架系统进行参数优化。已知经座椅传至人体的垂向加速度为影响乘员乘坐舒适性的最主要指标,此外还需综合考虑行驶安全性和是否超过悬架的限位行程。由于引入座椅悬架系统对轮胎动载荷的影响可忽略不计,故在进行座椅悬架系统参数优化时,只需在满足座椅及车身悬架动行程均能在正常限位内工作且小于初始系统的条件下,实现控制驾驶员及后排“座椅、人体”垂向加速度最小的优化目的。
根据系统的优化目的,即控制“座椅、人体”垂向加速度最小,设置适应度函数为

其中:cf_opt,cr_opt为经参数优化后驾驶员及后排“座椅、人体”垂向加速度均方根值,cf_ini,cr_ini为初始系统驾驶员及后排“座椅、人体”垂向加速度均方根值。
所设计的座椅悬架参数优化系统的约束条件为
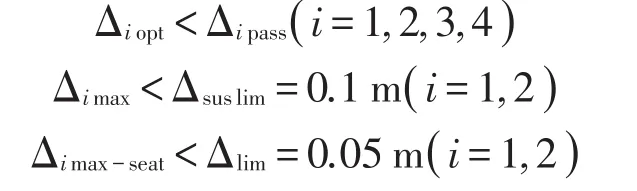
其中:Δiopt为参数优化系统车身及座椅悬架动行程均方根值,Δipass为初始系统车身及座椅悬架动行程均方根值,Δimax为车身悬架动行程最大值,Δsuslim为允许的车身悬架工作空间,Δimax-seat为座椅悬架动行程最大值,Δlim为允许的座椅悬架工作空间。
由于传统粒子群算法面对有约束复杂问题时寻优能力较差,本文采用鲁棒性好的加速粒子群算法(APSO)实现对座椅悬架刚度及阻尼参数的寻优。APSO算法是在经典PSO算法基础上,通过设定恰当的加速系数,提高粒子随机性的优化算法。该算法既保留了传统算法实时性好、操作简便等优点,也解决了易陷入局部最优,早熟收敛的问题,提升了算法的寻优能力。
座椅悬架的参数取值范围需根据其固有频率及阻尼比进行限制,既要保证人体垂向最敏感频率范围位于减振区域,又要避开车身固有频率。由于座椅悬架的阻尼比要达到0.2以上才有较好的减振效果,但考虑到材料的限制,取阻尼比范围在0.2~0.3之间。故座椅悬架参数取值范围为
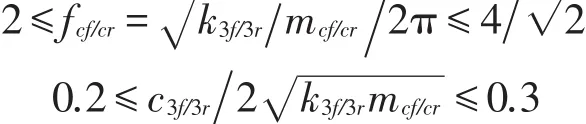
在经APSO算法寻优后,适应度函数(4)最终收敛于fmin=1.7208,优化后所得座椅悬架各参数为

将所得参数优化系统代入图2被动系统仿真模型中进行仿真,时间为20 s。
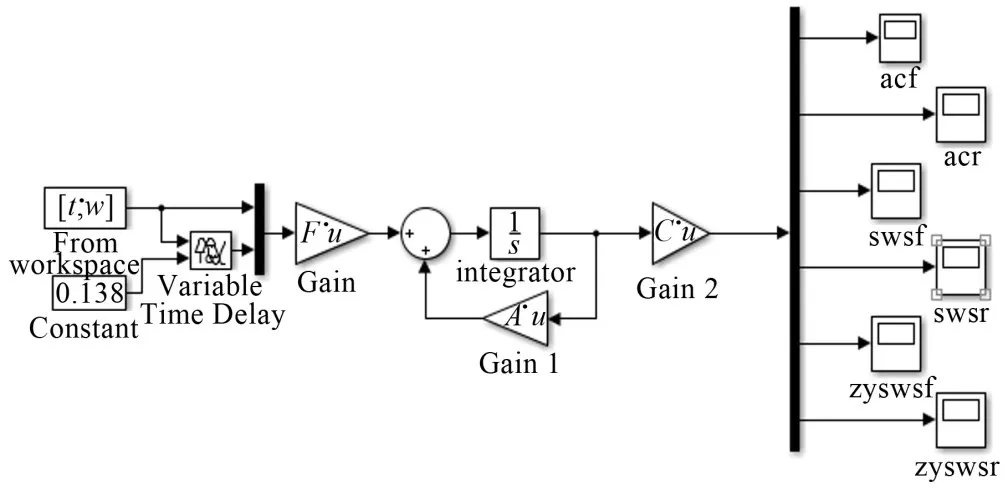
图2 半车被动控制系统仿真模型
将所得“座椅、人体”垂向加速度最大值及均方根值与初始系统、两组随机参数系统以及传统粒子群算法寻优系统进行对比,见表2。
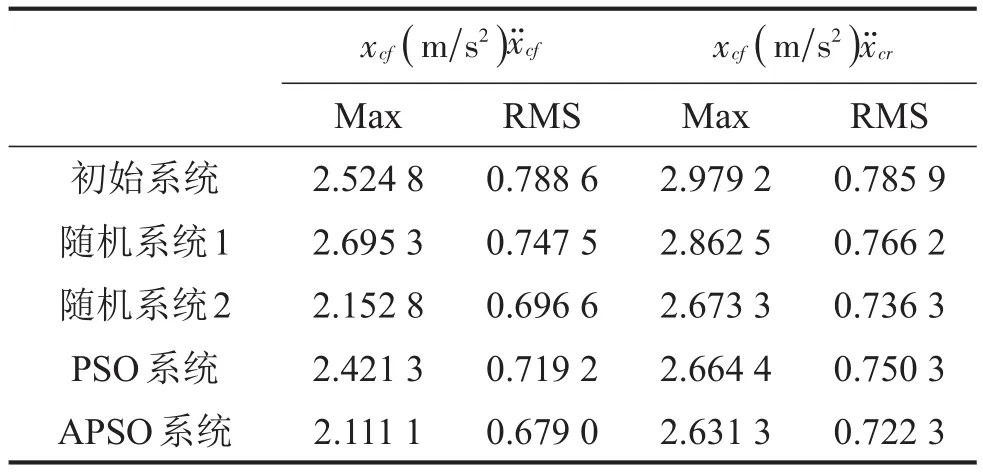
表2 参数优化前后“座椅、人体”垂向加速度对比
由表中数据可知,APSO参数优化系统的驾驶员处“座椅、人体”垂向加速度最大值与均方根值与初始系统相比分别降低了16.39%13.90%,后排处“座椅、人体”垂向加速度最大值与均方根值也分别降低了11.68%和8.09%。可证明,基于APSO算法参数优化后的座椅悬架系统有效降低了“座椅、人体”垂向加速度。通过与传统粒子群算法优化结果的对比,也验证了本文所采用的加速粒子群算法的寻优性能,且传统粒子群算法寻优时速度慢、易陷入局部最优等弊端,在加速粒子群算法中已得到了改善。另外通过引入两组随机参数的座椅悬架系统的仿真结果,也验证了基于APSO算法的座椅悬架系统参数优化的可靠性。
将参数优化系统中的驾驶员及后排座椅悬架动行程的最大值及均方根值仿真结果与初始系统进行比较,见表3。
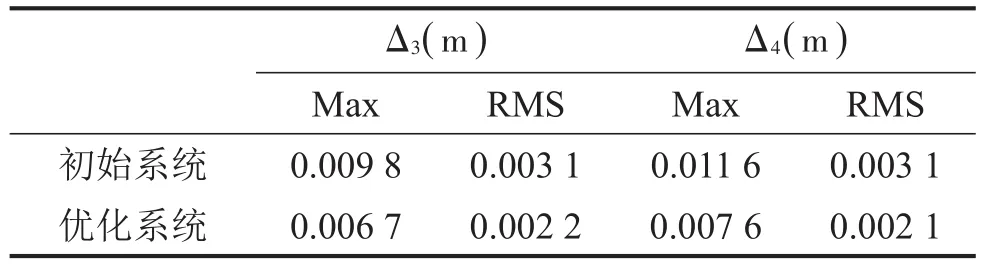
表3 参数优化前后驾驶员及后排座椅悬架动行程对比
由表3可知,驾驶员处座椅悬架动行程最大值与均方根值分别降低了31.63%和29.02%,后排座椅悬架动行程最大值与均方根值分别降低了34.48%和32.26%。可见参数优化系统在衰减“座椅、人体”垂向加速度的同时,也降低了座椅悬架动行程,有效提升了乘坐舒适性。
将参数优化系统中“座椅、人体”垂向加速度幅频特性曲线与初始系统进行对比,如图3所示。
可见,参数优化系统中驾驶员及后排座椅处的“座椅、人体”垂向加速度在低频段的响应幅值相较于初始系统均有降低,引入座椅悬架系统导致低频段隔振性能较差的情况得到了初步改善,有效衰减了由车身地板传至人体的垂向振动。但低频段响应峰值仍相对较高,且在大于4 Hz频率段,参数优化系统驾驶员及后排“座椅、人体”垂向加速度幅值开始高于初始系统,隔振效果恶化。但受制于被动支承元件,参数优化过程无法进一步实现对“座椅、人体”垂向加速度的衰减。
2 最优线性二次型控制系统设计及优化
为进一步衰减“座椅、人体”垂向加速度,提升座椅悬架的隔振性能,在参数优化系统基础上,参考车身主动悬架的设计方式分别于前后座椅悬架处安装作动器,建立主动座椅悬架系统模型。
取系统的状态变量及输出变量与参数优化系统相同,则主动系统的状态空间表达式为

式(5)中:u=[UfUr]T为系统作动力,系统的控制矩阵B及传递矩阵D可根据系统动力学方程(1)求得。
由参数优化过程分析可知,影响乘坐舒适性的评价指标较多,故本文在进行座椅悬架系统主动控制时,采用在多变量控制时性能优越,且适应性较强的最优线性二次型(LQR)控制实现。为优化乘坐舒适性,根据所分析的影响乘坐舒适性的各项评价指标,建立的座椅悬架系统最优控制的目标函数为

其中q1,q2为驾驶员及后排处“座椅、人体”垂向加速度加权系数,q3,q4为车身前后悬架动行程加权系数,q5,q6为驾驶员及后排座椅悬架动行程加权系数。
令加权矩阵q=diag[q1q2q3q4q5q6],将状态空间变量x代入目标函数式(6)中,令

则目标函数可化为

当系统隔振模型各参数值及加权矩阵q确定后,可根据下述黎卡提(Riccati)方程求出最优控制反馈增益矩阵K
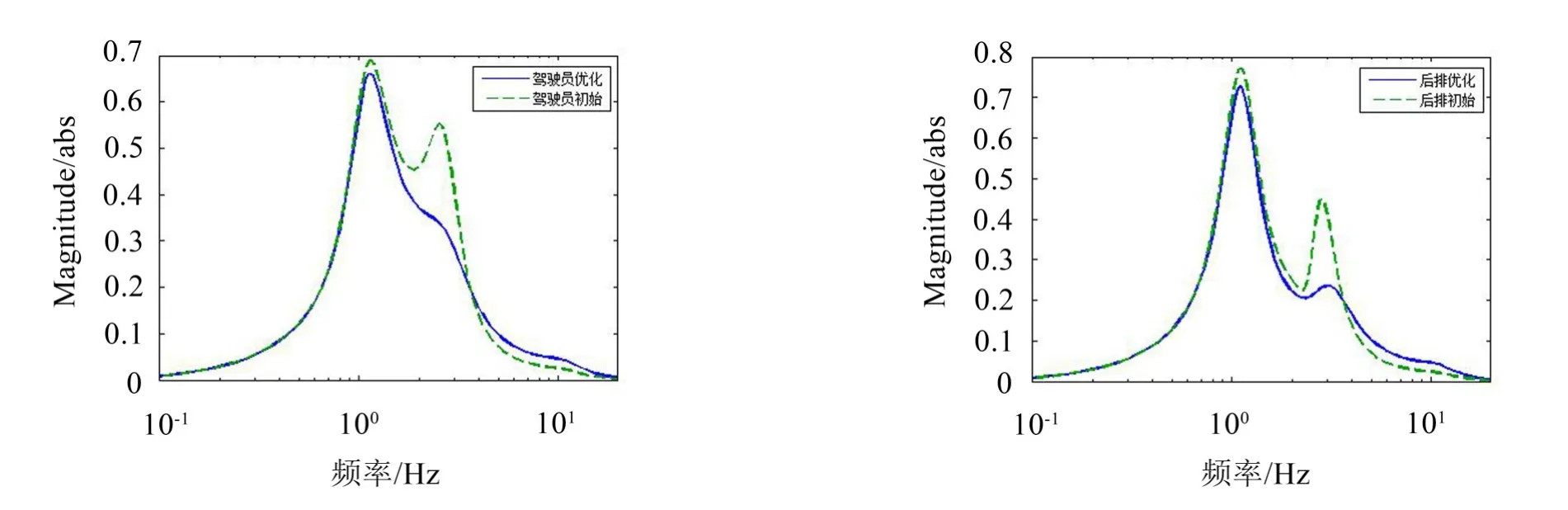
图3 初始、参数优化系统 cf,cr幅频特性对比

由于求解上述方程较为复杂,可根据所建立的系统状态空间表达式(5)及性能目标函数式(7),通过调用MATLAB中最优线性二次控制器设计函数[K,S,E]=lqr(A,B,Q,R,N),求得最优控制反馈增益矩阵K。根据任意时刻的反馈状态变量x(t)可得出任意t时刻的作动器最优控制力

可知,在模型参数已确定的条件下,加权矩阵q的取值是设计最优线性二次型控制器的关键。然而目前大多数控制器中加权矩阵往往由设计者根据经验及所需设计性能自行确定,主观性较强,难以实现全局最优。为提高最优控制器控制性能,本文采用上文中所验证过的寻优性能优越的APSO算法对最优线性二次型控制器中加权矩阵进行寻优。加权矩阵寻优过程中的约束条件及适应度函数的设计参考参数优化系统,则加权矩阵寻优的适应度函数为

其中:cf_act,cr_act为主动座椅悬架系统驾驶员及后排处“座椅、人体”垂向加速度均方根值,cf_opt,cr_opt为参数优化系统驾驶员及后排处“座椅、人体”垂向加速度均方根值。
经APSO算法寻优后,系统适应度函数式(10)最终收敛于fmin=1.4301,此时所对应的加权矩阵为

将基于APSO寻优确定加权矩阵的LQR控制器代入Simulink中进行仿真,仿真时间为20 s,主动座椅悬架系统的仿真模型如图4所示。
将仿真后所得系统“座椅、人体”垂向加速度和最优控制力与参数优化系统及基于GA寻优确定加权矩阵的LQR系统进行比较,结果见表4。
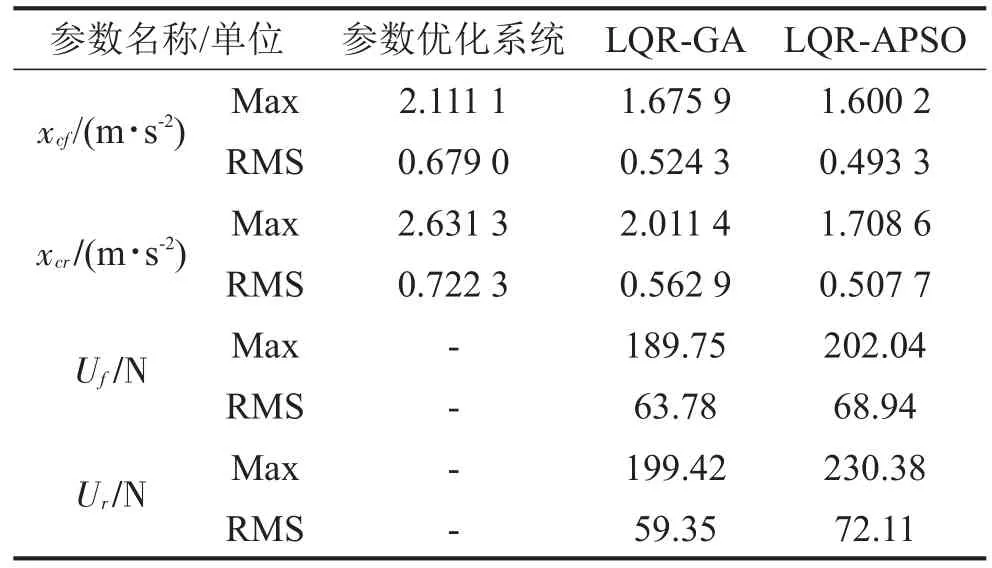
表4 主动控制系统与参数优化系统各性能参数对比
由表中数据可知,两组LQR主动座椅悬架系统相较于参数优化系统,“座椅、人体”垂向加速度均有了较大幅度的衰减,其中基于GA算法的LQR系统中“座椅、人体”垂向加速度均方根值分别降低了22.78%和22.07%,而基于APSO算法的LQR系统中“座椅、人体”垂向加速度均方根值则分别降低了27.35%和29.71%,降幅均高于基于GA的LQR控制系统。可见主动座椅悬架系统能进一步抑制人体的垂向加速度,提高乘坐舒适性,且基于APSO的LQR控制系统在衰减人体垂向振动方面性能更好,故APSO算法对LQR控制器加权矩阵的寻优能力优于常见的GA算法。

图4 半车主动控制系统仿真模型
通过最优控制力的对比,可知两LQR系统所需外部作动力相差不大,且考虑到基于APSO的LQR座椅悬架系统对“座椅、人体”垂向加速度的抑制更为理想,故可接受相较于GA优化的LQR控制系统略大的作动力范围。通过综合考虑作动力取值、作动器的响应时间及可靠性等因素,可选取直线电机作为本文所设计的基于APSO的LQR座椅悬架系统中的外接作动器。
经APSO优化后的LQR座椅悬架系统中座椅悬架动行程最大值及均方根值与参数优化系统进行比较,见表5。
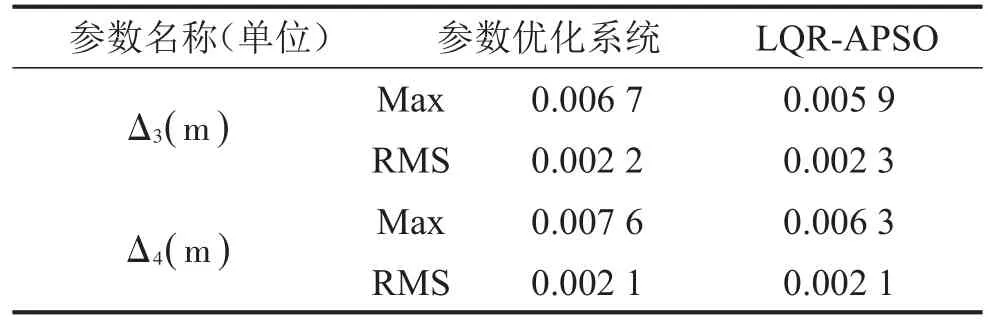
表5 APSO-LQR系统与参数优化系统座椅悬架动行程对比
由上表知,基于APSO算法优化的LQR主动座椅悬架控制系统中座椅悬架动行程最大值均位于正常限位行程内,且相较于参数优化系统有所降低。可见基于APSO优化的LQR主动座椅悬架控制系统能够同时实现对人体垂向加速度及座椅悬架的动行程的有效衰减,大大提升了乘坐舒适性。由于系统无需以大幅牺牲悬架动行程为代价,即可有效降低人体垂向加速度,设计符合工程实际。
将参数优化、基于APSO及GA的LQR控制系统中“座椅、人体”的垂向加速度幅频特性进行对比,如图5所示。
分析可知,两组LQR主动座椅悬架系统的“座椅、人体”垂向加速度响应峰值相较于参数优化系统已有了较大幅度的衰减,解决了参数优化系统中存在的低频段垂向加速度响应峰值较大的问题。虽然在>13 Hz时,主动系统的“座椅、人体”垂向加速度频响函数幅值高于被动系统,但总体幅值较小,且已避开垂向人体最敏感频率段,对乘坐舒适性的影响不大。而两种主动控制系统相比,基于APSO优化的LQR系统中“座椅、人体”垂向加速度明显低于由GA优化的LQR控制系统。可证明在人体最敏感频率段,基于APSO的LQR控制系统在衰减人体垂向加速度、提高乘坐舒适性方面优于基于GA的LQR控制系统。
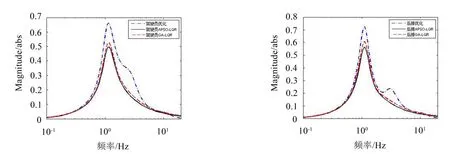
图5 APSO-LQR、GA-LQR与参数优化系统 cf,cr幅频特性对比
3 结语
本文建立了“车轮-车身-座椅、人体”6自由度隔振系统模型,应用加速粒子群算法对座椅悬架进行参数优化,并在此基础上参考车身主动悬架系统的LQR控制器,建立了最优线性二次型主动座椅悬架系统,控制器的加权矩阵由加速粒子群算法确定。通过将参数优化系统以及主动控制系统利用Simulink进行仿真,所得结论如下:
(1)参数优化系统能在无外接作动器的条件下提升座椅低频段的隔振性能,但系统的“座椅、人体”垂向加速度响应峰值仍较高.
(2)基于加速粒子群算法的最优线性二次型控制系统,通过外接作动器,能够大幅降低人体最敏感频率段的“座椅、人体”垂向加速度,且有效衰减了“座椅、人体”垂向加速度响应峰值,在改善车辆乘坐舒适性方面,能力优于座椅悬架研究中常见的基于遗传算法的最优控制系统。
[1]TDGILLESPIE.Fundamentals of vehicle dynamics[M],Soc.Automotive Eng.,1990.
[2]COLIN HANSEN,SCOTT SNYDER.Control of noise and vibration[M].2 nd Revised edition,Florida:CRC Press,2012.
[3]CRFULLER,S J ELLIOTT,P A NELSON.振动主动控制[M].北京:国防工业出版社,2014.
[4]ZAREH S H,ABBASI M,MAHDAVI H,et al.Semiactive vibration control of an eleven degrees of freedom suspension system using neuro inverse modelof magnetorheological dampers[J].Journal of Mechanical Science and Technology,2012,26(8):2459-2467.
[5]MOZAFFARI A,DOOSTHOSEINI A,AZAD N L.Predictive control of suspension systems through combining dynamicmatrix and constrained variable structure controllers[J].Journal of Dynamic Systems,2016,138(12):121007-121007-19.
[6]ALDAIR A A,WANG W J.A neuro fuzzy controller for full vehicle active suspension systems[J].Journal of Vibration&Control,2012,18(12):1837-1854.
[7]DAVE CROLLA,喻凡.车辆动力学及其控制[M].北京:人民交通出版社,2004.
[8]PADDAN G S,GRIFFIN M J.Evaluation of whole-body vibration in vehicles[J].Journal of Sound&Vibration,2002,253(1):195-213.
[9]International organization for standardization.Mechanical vibration and shock-evaluation of human exposure to whole-body vibration-Part 1:General requirements[S].ISO 2631-1,1997.
[10]LADKANY,GEORGE SAMAAN.Design and characterization of a shock and vibration mitigation seat system[D].Las Vegas:UNLV,2009.
[11]CHOIS B,HAN Y M.Vibration controlof electrorheologicalseatsuspension with human-body model using sliding mode control[J].Journal of Sound&Vibration,2007,303(1–2):391-404.
[12]BHARALI J,BURAGOHAIN M.Design and performance analysis of Fuzzy LQR;Fuzzy PID and LQR controller for active suspension system using 3 degree of freedom quarter car model[C].International Conference on Power Electronics,Intelligent Control and Energy Systems.IEEE,2016:1-6.
[13]AMITADIVEKAR,BHUSHANDMAHAJAN.Response optimization and lqr based control for quarter car suspension with seat-driver model[C].International Conference on Automatic Control and Dynamic Optimization Techniques, International Institute of Information Technology.IEEE,2016:1007-1012.
[14]SUN L L,SONG K J.Optimal control of active ambulance stretcher suspension[J].Materials Science Forum,2004,471-472:312-316.
[15]AGRAWAL J,AGRAWAL S.Acceleration based particle swarm optimization(APSO)for RNA secondary structure prediction[M].Progress in Systems Engineering.Springer International Publishing,2015:149-5.
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
汽车维修与保养(2021年8期)2021-02-16
装备制造技术(2020年2期)2020-12-14
北京汽车(2016年6期)2016-10-13
故事作文·低年级(2016年7期)2016-05-14
汽车实用技术(2015年8期)2015-12-26
汽车维修与保养(2015年7期)2015-04-17
汽车维护与修理(2015年7期)2015-02-28
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年2期)2015-02-28