环保型脚踏式敲背机方案设计
2018-06-20 03:34徐爱群高俊涛
浙江科技学院学报 2018年3期
徐爱群,高俊涛
(浙江科技学院机械与能源工程学院,杭州310023)
随着计算机技术在生产生活中的普及,人们经常久坐在电脑前,姿势很少变动,因此导致背颈部的压力增大,引发背部、颈部疾病[1-3];身体长时间得不到锻炼,血液凝结黏稠还会引发心脑血管疾病[4]。目前针对久坐问题有各式各样的按摩仪器[5-7],市场上以按摩椅[8]居多,此类设备体积庞大,价格昂贵,耗费电能,需要复杂的控制系统[9-11],不能促进腿脚的活动。而笔者设计的环保型脚踏式敲背机,能够利用活动腿脚产生的能量驱动机构运转以舒缓背颈部疲劳,其结构简单,使用方便,响应快速,绿色环保。
1 工作原理介绍
图1是环保型脚踏式敲背机(以下简称敲背机)的机构运动示意图。因为链传动[12]能够传递较大的动力,传动效率较高,对轴压力较小;带传动[13]能够缓和冲击,吸收振动,实现较大距离间两轴的传动,所以在机构的水平方向和竖直方向上分别采用了链传动和带传动。左右两侧的敲击机构结构相同,通过双脚踩动踏板来驱动主动链轮,主动链轮通过链条带动从动链轮,从动链轮和主动带轮同轴,主动带轮通过传动带带动从动带轮,从动带轮又和凸轮同轴,凸轮的转动促使推杆有规律地上下运动,最终通过连杆使敲击装置有规律地敲击背部。
通过对一部分身高为175 cm的成年人在电脑面前工作时坐姿的分析[14],测量他们脚掌摆放位置与靠背椅前沿的水平距离,并结合市场上靠背椅的尺寸,确定AB=800 mm;测量他们在电脑面前工作时肩膀与地面的垂直距离,确定CD=500 mm,推杆的长度取300 mm,可调节,调节范围为200~400 mm,以适应不同身高者的需求;测量他们的肩宽,确定EF长度取250 mm,可调节,调节范围为100~500 mm,以适应不同肩宽者的需求。通过自我调节双脚踩动踏板的速度,可以控制凸轮的转速,从而调节敲击装置敲击背部的频率。

图1 机构运动示意Fig.1 Diagram of mechanical motion
2 敲击机构设计方案分析
为了使背部得到放松,像人工敲背一样,使背部得到不断的捶打和敲击,就要让活动腿脚产生的能量转化成敲打在使用者背上的力,由图1可知,通过脚踏板、链传动和带传动将脚上的能量转化为凸轮输入的转矩。而不断地捶打和敲击势必需要用到运动循环,又要求机构简单紧凑,响应快速,由此想到了利用重力锁合的凸轮机构[15],具体方案如图2所示。
由于滑块和连杆在K点右端的的重量之和远大于敲击装置和连杆在K点左端的重量之和,利用重力,当凸轮在近休止时机构如图2(a)所示,此时敲击装置与使用者背部分离;当凸轮在远休止时机构如图2(b)所示,此时敲击装置与使用者背部接触,起到敲击的作用。
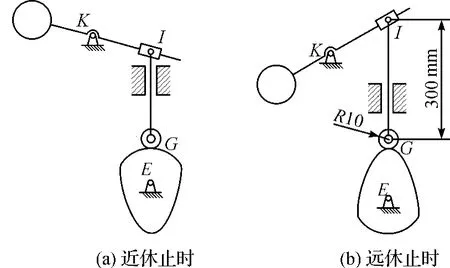
图2 敲击机构Fig.2 Percussive mechanism
敲击机构的自由度[16]数目为

考虑到凸轮机构在运动过程中滚子和凸轮可能会发生脱离的现象,将凸轮设计成槽型凸轮,槽的宽度略大于滚子的厚度,正常运转时滚子始终处于槽内,增加了运动的可靠性。
3 凸轮轮廓曲线设计
要设计凸轮的轮廓曲线,首先要对推杆的运动进行分析。假设使用者匀速踩动踏板,即输入恒定的转矩,那么凸轮在稳定后将保持恒定的角速度,对推杆的运动要求为:当凸轮转过90°时,推杆上升50 mm,凸轮继续转过60°,推杆静止不动;凸轮再继续转过90°时,推杆下降50 mm,凸轮转过剩余角度时,推杆又静止不动。
3.1 确定运动规律
采用常见的对心直动滚子推杆盘形凸轮机构,初步设定凸轮的基圆半径为r0=50 mm,推杆滚子半径为rr=10 mm。选定推杆的运动规律,因其工作条件为低速轻载,在保证推杆运动的平稳性和工作精度的情况下,由机械原理[17]知识可知,推程回程运动规律均可选用等速运动规律。
3.2 求理论轮廓曲线
图3为用直动推杆凸轮轮廓曲线解析法求解的原理图。凸轮的理论轮廓曲线上任意一点B(x,y)可由式(1)计算得到:

式(1)中:e为偏距;;s为推杆产生的相应位移;δ为凸轮转过的角度。
对于对心直动滚子推杆盘形凸轮机构,其偏距e=0,s0=r0,则凸轮的理论轮廓曲线的坐标可简化为


图3 凸轮轮廓曲线设计Fig.3 Design of cam pitch curve
位移s分段计算如下:
1)推程阶段,推程运动角

2)远休止阶段,远休止角


4)近休止阶段,近休止角

取计算间隔为5°(计算间隔通常取 0.5°~5°,当凸轮工作精度要求高时取小值),将以上各相应值代入式(2)计算理论轮廓曲线上各点的坐标值。在计算时应注意:在推程阶段取 δ=δ1,在远休止阶段取 δ=δ01+δ2;在回程阶段取 δ=δ01+δ02+δ3,在近休止阶段取 δ=δ01+δ02+δ03+δ4。
凸轮理论轮廓曲线各点的坐标值计算结果见表1。
在MATLAB中编写相应程序绘制极坐标系中的凸轮理论轮廓曲线,凸轮理论轮廓曲线是分析推杆运动的基础,是求工作轮廓曲线的前提,理论轮廓曲线的合理性也是保证工作轮廓曲线合理性的充分条件。凸轮理论轮廓曲线各段相应公式见表2。绘制凸轮理论轮廓曲线的流程如图4所示。
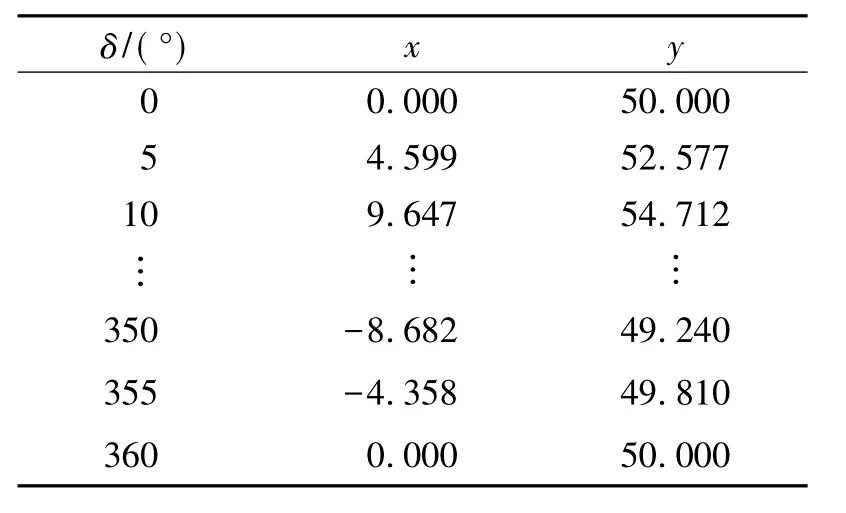
表1 凸轮理论轮廓曲线各点的坐标Table 1 Point coordinates of cam pitch curve

表2 凸轮理论轮廓曲线各段相应公式Table 2 Corresponding formulas of cam pitch curve at different sections
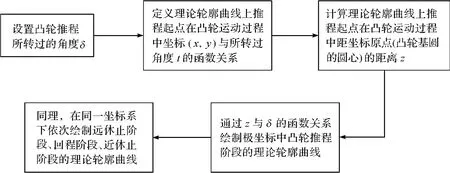
图4 绘制凸轮理论轮廓曲线的流程Fig.4 Flow chart of drawing cam pitch curve
在极坐标中能更清楚地表达凸轮各段所实现的功能和转过的角度,该凸轮在极坐标系中的理论轮廓曲线如图5所示。
3.3 求工作轮廓曲线
因为工作轮廓曲线与理论轮廓曲线在法线方向的距离应等于滚子半径rr,故当已知理论轮廓曲线上任意一点B(x,y)时,只要沿理论轮廓曲线在该点的法线方向取距离等于滚子半径,即得工作轮廓曲线上的相应点B'(x',y')。理论轮廓曲线B点处法线的斜率tanθ=-d x/d y=(d x/dδ)/(-d y/dδ)。
根据式(1)有

工作轮廓曲线上对应点B'(x',y')的坐标为
式(3)中,

图5 极坐标系中的凸轮理论轮廓曲线Fig.5 Cam pitch curve in system of polar coordinates

工作轮廓曲线上分段计算公式如下:

在MATLAB中编写相应程序绘制直角坐标系中的凸轮工作轮廓曲线,凸轮工作轮廓曲线是实际凸轮的外部轮廓,对凸轮的生产加工具有指导意义。凸轮工作轮廓曲线各段相应公式见表3。绘制凸轮工作轮廓曲线的流程如图6所示。直角坐标系下的工作轮廓曲线如图7所示。

表3 凸轮工作轮廓曲线各段相应公式Table 3 Corresponding formulas of cam contour at different sections

图6 绘制凸轮工作轮廓曲线的流程Fig.6 Flow chart of drawing cam contour
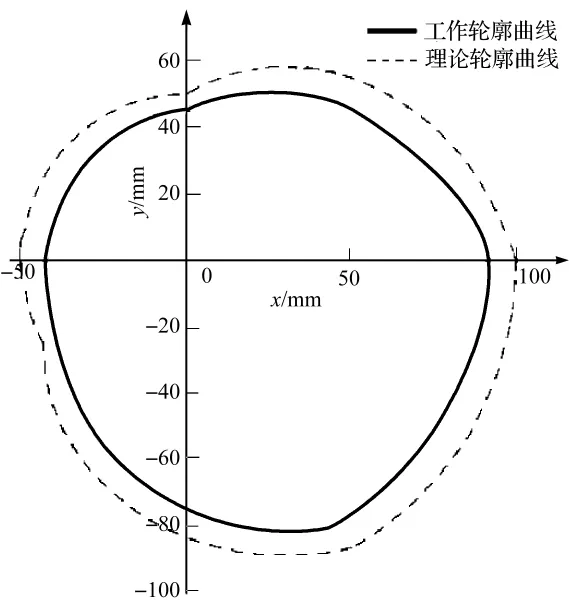
图7 直角坐标系中的凸轮工作轮廓曲线Fig.7 Cam contour in system of rectangular coordinates
4 结论
由人们久坐在电脑前工作,缺乏运动,易处于亚健康状态而引起思考,设计了该环保型脚踏式敲背机,使人们无需放下手头的工作,足不出户就能活动腿脚,运用活动腿脚产生的能量,舒缓背部和颈部的压力,缓解疲劳,振奋精神,提高工作效率。本研究只提出了机构的设计理念和设计原理,分析了敲击机构的设计方案,研究并绘制了凸轮的理论轮廓曲线和工作轮廓曲线,未来还可以在敲背机上设计矫正坐姿的装置来帮助人们改掉不良的坐姿习惯,增加吸收辐射的功能以减轻电脑辐射对人们的损伤,使其能够更加多样化地为人们服务。
[1] 刘映海.久坐行为研究评述[J].体育研究与教育,2017,32(50):7.
[2] 管培琪,李建设,顾耀东.久坐姿态对人体健康影响的研究进展[J].浙江体育科学,2017,39(5):98.
[3] 王光发.城市社区慢性背颈部疾病患者健康相关生命质量研究[D].杭州:浙江大学,2009.
[4] 王东菊.心脑血管疾病流行概况及主要影响因素[J].预防医学论坛,2016,22(1):71.
[5] 赵东亮,李海婷,朱太咏,等.舒筋活络自控按摩仪的研制[J].中国医疗设备,2011,26(1):41.
[6] 何凯,郭磊,宋原.一种多功能可穿戴按摩机器人的设计与实现[J].机电产品开发与创新,2016,29(2):1.
[7] 高焕兵,鲁守银,王涛,等.中医按摩机器人研制与开发[J].机器人,2011,33(5):553.
[8] 王严,申黎明.我国电动按摩椅的发展现状与技术展望[J].家具,2017,38(2):6.
[9] 翟海祥,肖光润,吴何畏.基于PLC的可调按摩椅控制系统设计[J].装备制造技术,2017(9):213.
[10] 李进,韩东起.基于单片机的按摩椅的制作[J].电脑知识与技术,2013,9(2):438.
[11] 冯克达,王勇,尹鹏飞.基于STM32和触摸屏的智能按摩椅控制系统设计[J].机械,2014,41(增刊):75.
[12] 孟繁忠.我国链传动行业的技术研究现状及其发展趋势[J].机械传动,2012,36(1):1.
[13] 诸世敏,罗善明,余以道,等.带传动理论与技术的现状与展望[J].机械传动,2007,31(1):92.
[14] 王春阳.基于图像技术的人体坐姿监测研究[D].西安:西安电子科技大学,2013.
[15] 贺炜,曹巨江,杨芙莲,等.我国凸轮机构研究的回顾与展望[J].机械工程学报,2005,41(6):1.
[16] 黄真,刘婧芳,李艳文.150年机构自由度的通用公式问题[J].燕山大学学报,2011,35(1):1.
[17] 西北工业大学机械原理与机械零件教研室.机械原理[M].2版.北京:高等教育出版社,2013.178-179.
猜你喜欢
再生资源与循环经济(2022年8期)2023-01-06
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
哈尔滨轴承(2021年1期)2021-07-21
哈尔滨轴承(2021年1期)2021-07-21
哈尔滨轴承(2021年4期)2021-03-08
哈尔滨轴承(2020年3期)2021-01-26
科技视界(2018年21期)2018-12-10
中国核电(2017年1期)2017-05-17
建筑工程技术与设计(2015年26期)2015-10-21