一种馈能型混合悬架的多模式协调控制
2018-06-19 01:02:36寇发荣魏冬冬
中国机械工程 2018年11期
寇发荣 魏冬冬 梁 津 田 蕾
西安科技大学机械工程学院,西安,710054
0 引言
可控悬架采用一个可控作动器取代了原被动悬架的相应部件,可根据路况变化实时调节悬架刚度或阻尼,以提高车辆的平顺性和操纵稳定性[1-4],馈能型可控悬架在改善车辆动力学性能的同时,能回收悬架的振动能量[5-6]。
目前,馈能型可控悬架多采用传动性能好、馈能效率高的电磁式悬架作动器,如直线电机式作动器、滚珠丝杠式作动器、电动静液压式作动器等。电磁式作动器在用于悬架主动控制时,能使悬架性能明显改善,但作动器会消耗较多能量,降低车辆的燃油经济性[7-8];电磁式作动器在用于悬架半主动控制时,能回收一定能量,但存在死区和电磁阻尼力不足的问题[9-11],使悬架达不到理想的半主动控制效果;电磁式作动器作为馈能装置单一回收振动能量时,与半主动控制状态相比能回收更多能量,但悬架性能与被动悬架相近[12]。与电磁式悬架作动器相比,磁流变减振器能通过控制磁流变液的磁场强度实现阻尼的连续、无级可调,用于悬架半主动控制时不存在死区现象[13-14],但单一的磁流变减振器无法回收振动能量,且在半主动控制时会消耗一定的能量。
为了实现悬架的主动控制、半主动控制以及回收部分悬架振动能量,本文提出了一种基于滚珠丝杠式作动器和磁流变减振器的车辆馈能型混合悬架结构。
1 馈能型混合悬架结构与原理
混合悬架系统的结构见图1,主要由弹簧、磁流变减振器、滚珠丝杠式作动器、控制器、蓄电池以及相应的信号检测装置等组成。滚珠丝杠式作动器中的电机兼顾电动机和发电机的功能。

图1 馈能型混合悬架结构图Fig.1 Structure of regenerative energy hybrid suspension
馈能型混合悬架的工作原理为:控制器通过对相关信号的检测和判断,对混合悬架系统进行半主动或主动控制。对混合悬架半主动控制时,控制器控制磁流变减振器输出半主动控制力,此时滚珠丝杠式作动器作为馈能装置,将部分悬架振动的能量转化为电能并存储于蓄电池中;对混合悬架主动控制时,控制器控制滚珠丝杠式作动器输出主动控制力,此时无控制电流通过磁流变减振器,磁流变减振器的功能相当于传统的液压减振器,主动控制时滚珠丝杠式作动器消耗的能量由蓄电池提供。
当馈能型混合悬架的电机无法正常工作时,可利用磁流变减振器对混合悬架进行半主动控制;当磁流变减振器损坏无法对悬架进行半主动控制时,可利用滚珠丝杠式作动器对混合悬架进行主动控制。
2 馈能型混合悬架动力学模型的建立
2.1 混合悬架动力学模型
本文建立了馈能型混合悬架系统的1/4车辆2自由度模型,见图2。利用牛顿运动定律,得到其运动方程:

取状态向量和输出向量分别为

式中,ms为簧载质量;mu为非簧载质量;ks为弹簧刚度系数;F为控制力(半主动控制时为Fb,主动控制时为Fz);kt为轮胎刚度系数;qt为地面输入位移;x2为簧载质量位移;x1为非簧载质量位移;cs为磁流变减振器的黏滞阻尼。
可得悬架状态方程

式中,A、B、C、D分别为状态矩阵、输入矩阵、输出矩阵和传递矩阵。

图2 2自由度混合悬架力学模型Fig.2 Dynamic model of 2-DOF hybrid suspension
2.2 磁流变减振器数学模型
忽略磁流变液的摩擦力和液流惯性,磁流变减振器在混合工作模式的阻尼力[15]

式中,η为流体动力黏度;l为工作极板长度;h为工作极板间距;τy为磁流变液体的剪切应力;Ap为活塞的有效作用面积;b为工作极板的宽度。
由式(4)可知,磁流变减振器的阻尼力包括黏滞阻尼力Fn和库仑阻尼力Fk,其中Fn与磁流变减振器的活塞运动速度存在函数关系;Fk与磁流变减振器的控制电流存在函数关系,所以可将式(4)转变为

式中,ce、a1、a2、a3分别为多项式系数;Ik为磁流变减振器的控制电流。
对磁流变减振器进行特性试验,对试验结果进行回归拟合分析,得 ce、a1、a2、a3分别为180、86、-38、120。该磁流变减振器的阻尼力

由式(4)~式(6)可知,磁流变减振器的 Fn不消耗能量,可以等效为传统液压减振器产生的阻尼力;混合悬架半主动控制时的控制力是通过调节Ik得到的库仑阻尼力Fk。
磁流变减振器在半主动控制时的瞬时能耗功率

式中,ηb为减振器工作效率。
磁流变减振器的能耗

2.3 滚珠丝杠式作动器数学模型
混合悬架主动控制时,滚珠丝杠式作动器中的电机作为电动机工作,忽略电动机电感时,电动机的输入电压E和输出转矩Tm分别为

式中,u为感应电动势;kT为电机电磁转矩系数;Iz为电机电流;r为电机内阻;L为滚珠丝杠导程;ke为电机反电动势系数。
混合悬架主动控制时的瞬时能耗功率

联立式(9)~式(14)得

式中,ηz为滚珠丝杠式作动器传动效率;Wz为电动机的能耗。
悬架馈能时滚珠丝杠式作动器产生的电磁阻尼力

式中,R为馈能电路的等效电阻。
悬架馈能时的瞬时馈能功率

悬架馈能能量

3 混合悬架多模式协调控制
3.1 电磁阻尼力反馈调节的半主动模式
天棚算法具有运算简便、响应速度快、鲁棒性强等优点,因此混合悬架系统在半主动和主动控制时均采用天棚控制算法。磁流变减振器只能在(x˙2-x˙1)x˙2> 0 时起到半 主动控制作用,所以混合悬架的理想半主动控制状态为

式中,csky为天棚系数。
由式(20)可知,csky一定时,混合悬架的理想半主动控制力 cskyx˙2仅与 x˙2相关,但此时作为馈能装置的滚珠丝杠式作动器会产生电磁阻尼力Fs,并作用于悬架,使悬架的实际半主动控制力与cskyx˙2存在差异。图3为混合悬架半主动控制时各阻尼力对比图。

图3 混合悬架半主动控制时各阻尼力对比Fig.3 Damping comparison of hybrid suspension semi-active controlled
由图3可知,与理想半主动控制力相比,混合悬架的实际半主动控制力存在剧烈波动,实际半主动控制力的绝对值在某些时刻远大于|cskyx˙2|,控制力的剧烈变化会使悬架达不到理想的半主动控制效果。利用电磁阻尼力反馈调节的方法减小cskyx˙2与实际半主动控制力间的差值,方法如下:当|cskyx˙2|>|Fs|时,混合悬架的半主动控制力由磁流变减振器和滚珠丝杠式作动器同时提供,此时控制器向磁流变减振器输入可控电流Ik,使磁流变减振器输出的库仑阻尼力 Fk=cskyx˙2-Fs;当|cskyx˙2|≤ |Fs|时,混合悬架的半主动控制力为滚珠丝杠式作动器输出的电磁阻尼力Fs,此时无可控电流Ik输入磁流变减振器,磁流变减振器的功能相当于传统的液压减振器。由此,混合悬架半主动控制时不存在传统电磁式半主动悬架的死区,利于提高悬架的半主动控制效果。
有反馈调节时混合悬架的半主动控制力

有反馈调节时磁流变减振器输出的库仑阻尼力

由式(20)~式(22)可知,有电磁阻尼力反馈调节时磁流变减振器输出的|Fk|会减小,由式(7)和式(8)可知,|Fk|减小时,磁流变减振器的能耗会随之减小,利于改善车辆的燃油经济性。
混合悬架有无电磁阻尼力反馈调节时,悬架半主动控制力大小对比见图4。

图4 混合悬架的半主动作用力Fig.4 Semi-active force of hybrid suspension
由图4可知,混合悬架的理想半主动控制力均方根为310.8 N,无电磁阻尼力调节时悬架半主动控制力均方根为349.8 N,有电磁阻尼力调节时悬架半主动控制力均方根为318.1 N;无电磁阻尼力反馈调节时悬架半主动控制力与理想半主动力间相差12.55%,有电磁阻尼力反馈调节时悬架半主动控制力与理想的半主动力相差2.35%,所以有电磁阻尼力反馈调节时悬架实际半主动控制力波动幅度较小,利于提高混合悬架的半主动控制效果。图5所示为有无反馈调节时混合悬架半主动控制动态响应。
混合悬架半主动控制的响应均方根值见表1。由表1可知:与被动悬架相比,有电磁阻尼力反馈调节时混合悬架的簧载质量加速度、悬架动挠度、轮胎动载荷分别降低了18.51%、20.76%、8.25%;与无电磁阻尼力反馈调节相比,有电磁阻尼力反馈调节时混合悬架的簧载质量加速度、悬架动挠度、轮胎动载荷分别降低了2.56%、7.05%、4.35%。

图5 混合悬架半主动控制动态响应Fig.5 The dynamic response of hybrid suspension semi-active controlled

表1 混合悬架半主动控制响应均方根Tab.1 The root mean square value of hybrid suspension semi-active controlled response
由式(8)和式(19)可得混合悬架在半主动控制时系统总能量:

由式(23)可得混合悬架在半主动控制模式时系统总能量随时间变化曲线,如图6所示。由图6可知,无电磁阻尼力反馈调节时混合悬架系统总能量为2 J,而有电磁阻尼力反馈调节时混合悬架系统总能量为129 J。
3.2 主动控制模式
滚珠丝杠式作动器可以在任何悬架状态向混合悬架系统提供主动控制力,主动控制时电机作为电动机工作且消耗一定的能量。图7所示为混合悬架主动控制的动态响应。

图6 混合悬架半主动控制系统能量Fig.6 The system energy of hybrid suspension semi-active controlled

图7 混合悬架主动控制的动态响应Fig.7 The dynamic response of hybrid suspension active controlled
混合悬架主动控制的响应均方根值见表2。由表2可知,与被动悬架相比,混合悬架在主动控制时的簧载质量加速度、悬架动挠度、轮胎动载荷分别降低了38.17%、17.49%、22.44%。
由式(16)可得混合悬架在主动控制模式时的能耗随时间变化曲线,如图8所示。由图8可知,混合悬架在主动控制时系统耗能为251 J。

表2 混合悬架主动控制响应均方根Tab.2 The root mean square value of hybrid suspension active controlled response

图8 混合悬架主动控制的能耗Fig.8 The energy consumption of hybrid suspension active controlled
3.3 协调控制器的设计
混合悬架主动控制时悬架隔振性能好但能耗高;混合悬架半主动控制时悬架经济性能好但控制具有局限性。考虑滚珠丝杠式作动器可在任何悬架状态实现对混合悬架的主动控制,设计了混合悬架的多模式协调控制策略:

混合悬架的多模式协调控制框见图9。
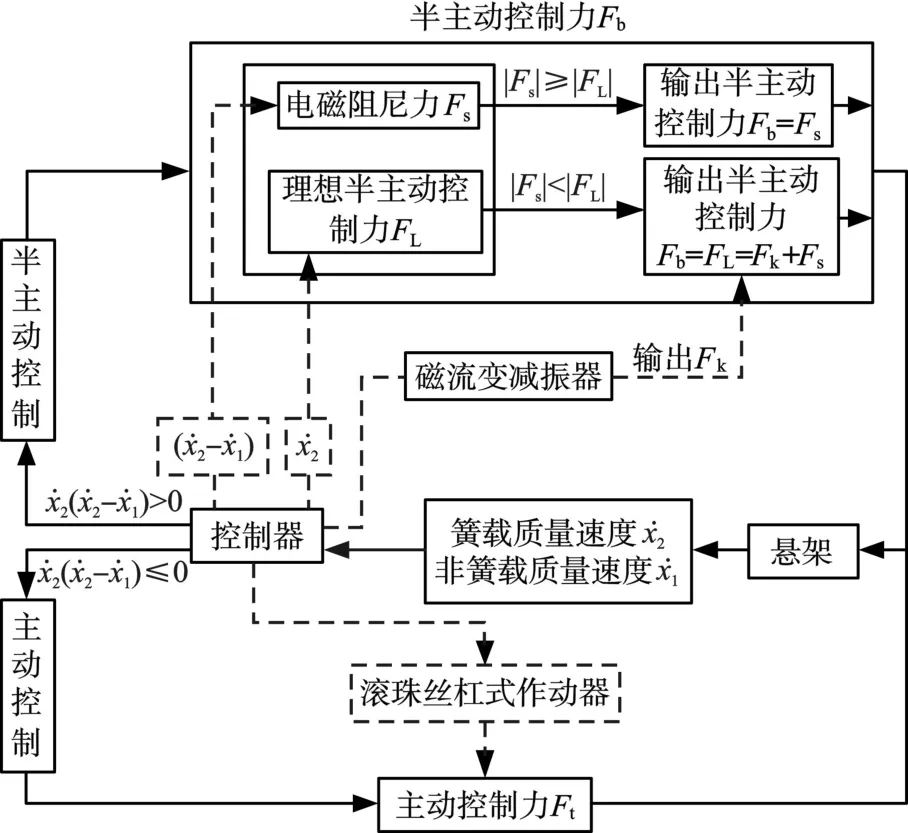
图9 协调控制框图Fig.9 The block diagram of hybrid suspension coordination controlled
由式(8)、式(16)和式(19)得混合悬架协调控制时系统总能量

混合悬架系统在协调控制时的平顺性能和经济性能主要受csky和 R的影响。不同csky和R时,混合悬架的簧载质量加速度均方根值和悬架系统总能量分别见图10和图11。由图10和图11可知,在小的csky和R时,混合悬架系统易实现自供能,但平顺性能较差;在大的csky和 R时,混合悬架系统的平顺性能较好,但经济性能较差。为了兼顾混合悬架的动力性能和经济性能,折中设计混合悬架协调控制器的csky和R分别为1 600 N·s/m、2Ω 。

图10 不同R和csky时混合悬架的簧载质量加速度Fig.10 The body acceleration of hybrid suspension at differentRandcsky

图11 不同R和csky时混合悬架系统的能量Fig.11 The energy of suspension system at differentRandcsky
利用MATLAB/Simulink软件对混合悬架多模式协调控制进行仿真,仿真时与悬架的单一主动控制模式进行对比分析。仿真车速为20 m/s,路面为B级,时间为5 s。混合悬架系统的主要参数如下:ms=210 kg,mu=38 kg,ks=22 366 N/m,kt=20 kN/m,cs=1 400 N·s/m,L=0.014 m,kT=0.082 N·m/A,r=0.5Ω ,ηz=0.97,ηb=0.98,csky=1 200 N·s/m。悬架在单一主动控制模式时的减振器采用车辆原有减振器,其阻尼值c0为1 600 N·s/m。
混合悬架多模式协调控制的动态响应曲线见图12,响应均方根见表3。由表3可知:与被动悬架相比,混合悬架的簧载质量加速度、悬架动挠度、轮胎动载荷分别降低了36.23%、8.74%、10.50%;与悬架的单一主动控制模式相比,混合悬架的簧载质量加速度降低了6.08%,但悬架动挠度和轮胎动载荷分别提高了15.17%和8.13%。

图12 混合悬架协调控制的动态响应Fig.12 The dynamic response of hybrid suspension coordination controlled

表3 混合悬架协调控制的响应均方根Tab.3 The root mean square value of hybrid suspension coordination controlled response
由式(16)和式(25)可得不同悬架系统总能量随时间的变化曲线,见图13。由图13可知:悬架在单一主动控制模式时系统总能量为-225 J,而混合悬架在协调控制时系统总能量为2 J;因此混合悬架在显著减振的同时系统实现了自供能。

图13 不同悬架系统的能量变化Fig.13 The energy changes of different suspension system
4 试验与分析
为了验证馈能型混合悬架系统在多模式协调控制时的减振效果,设计了混合悬架振动试验测试系统,如图14所示。

图14 馈能型混合悬架试验系统Fig.14 The test system of regenerative energy hybrid suspension
由于试验条件限制,试验中只测得了簧载质量加速度的动态响应。随机路面谱输入时,混合悬架多模式协调控制的簧载质量加速度响应结果见图15,功率谱曲线见图16。由图15和图16可知,在随机路面谱输入下,混合悬架的簧载质量加速度均方根下降了30.05%,且在不同频域时悬架动态响应良好。试验过程中忽略了滚珠丝杠式作动器和磁流变减振器的非线性因素,一方面使试验测得的簧载质量加速度衰减幅度小于仿真结果,另一方面使混合悬架在车轮固有频率12 Hz附近隔振效果不佳。

图15 混合悬架簧载质量加速度响应Fig.15 The response of hybrid suspension body acceleration

图16 簧载质量加速度功率谱曲线Fig.16 The power spectrum curve of body acceleration
5 结论
(1)利用滚珠丝杠式作动器和磁流变减振器,提出并设计了一种馈能型混合悬架结构。
(2)建立了1/4车2自由度馈能型混合悬架动力学模型,分析了混合悬架的半主动控制模式和主动控制模式,设计了混合悬架的多模式协调控制器,并在MATLAB/Simulink软件中建立了混合悬架多模式协调控制仿真模型。结果表明:混合悬架协调控制时动态响应良好,在显著减振的同时实现了其悬架系统的自供能。
(3)开展了混合悬架多模式协调控制效果验证试验。结果表明:与被动悬架相比,随机路面谱输入时混合悬架的簧载质量加速度均方根下降了30.05%,混合悬架的隔振性能良好。
[1] KURIMOTO M,YOSHIMURA T.Active Suspension of Passenger Cars Using Sliding Mode Controllers(Based on Reduced Models)[J].International Journal of Vehicle Design,2014,19(4):402-414.
[2] 周兵,吕绪宁,范璐,等.主动悬架与主动横向稳定杆的集成控制[J].中国机械工程,2014,25(14):1978-1983.ZHOU Bing,LYU Xuning,FAN Lu,et al.Integrated Control of Active Suspension System and Active Roll Stabilizer[J].China Mechanical Engineering,2014,25(14):1978-1983.
[3] WEEKS D A,BRESIE D A,BENO J H,et al.The Design of an Electromagnetic Linear Actuator for an Active Suspension[C]//International Congress&Exposition,2015.
[4] 王大勇,王慧.基于变论域模糊控制的车辆半主动悬架控制方法[J].中国机械工程,2017,28(3):366-372.WANG Dayong,WANG Hui.Control Method of Vehi-cle Semi Active Suspensions Based on Variable Universe Fuzzy Control[J].China Mechanical Engineering,2017,28(3):366-372.
[5] 寇发荣,杜嘉峰,王哲,等.电液半主动馈能悬架非线性建模与协调性优化[J].中国机械工程,2017,28(14):1701-1707.KOU Farong,DU Jiafeng,WANG Zhe,et al.Nonlinearmodeling and Coordinate Optimization of Semi-active EnergyRegenerativeSuspensionswithElectro-hydraulic Actuators[J].China Mechanical Engineering,2017,28(14):1701-1707.
[6] ZAREH S H,SARRAFAN A,KHAYYAT A A A,et al.Intelligent Semi-active Vibration Control of Eleven Degrees of Freedom Suspension System Using Magnetorheological Dampers[J].Journal of Mechanical Science&Technology,2012,26(2):323-334.
[7] SAGIV B D,BOBROVSKY B Z.Actively Controlled Vehicle Suspension with Energy Regeneration Capabilities[J].Vehicle System Dynamics,2011,49(6):833-854.
[8] 黄昆,张勇超,喻凡,等.电动式主动馈能悬架综合性能的协调性优化[J].上海交通大学学报,2009,43(2):226-230.HUANG Kun,ZHANG Yongchao,YU Fan,et al.Coordination Optimization for Synthetical of Comprehensive Performance[J].Journal of Shanghai Jiaotong University,2009,43(2):226-230.
[9] 赵廉健.基于分级变压的ESASRE作动器及控制的设计[D].镇江:江苏大学,2015.ZHAO Lianjian.Design of Actuator and Control System for Electromagnetic Semi-active Suspension Reclaiming Energy Based on Variable Battery Charge Voltage[D].Zhenjiang:Jiangsu University,2015.
[10] 王庆年,刘松山,王伟华,等.滚珠丝杠式馈能型减振器的结构设计及参数匹配[J].吉林大学学报(工学版),2012,42(5):1100-1106.WANG Qingnian,LIU Songshan,WANG Weihua,et al.Structure Design and Parameter Matching of Ball-screw Regenerative Damper[J].Journal of Jilin University(Engineering and Technology Edition),2012,42(5):1100-1106.
[11] 陈龙,施德华,汪若尘,等.基于混合控制策略的馈能悬架半主动控制[J].北京理工大学报,2016,36(3):252-257.CHEN Long,SHI Dehua,WANG Ruochen,et al.Semi-active Control of Energy-regenerative Suspension Based on Hybrid Control Strategy[J].Transactions of Beijing Institute of Technology,2016,36(3):252-257.
[12] 许广灿,徐俊,李士盈,等.电动汽车振动能量回收悬架及其特性优化[J].西安交通大学学报,2016,50(8):90-95.XU Guangcan,XU Jun,LI Shiying,et al.Energy Regenerative Suspension and Its Performance Optimization for Electric Vehicle[J].Journal of Xi'an Jiaotong University,2016,50(8):90-95.
[13] 冯占宗,陈思忠,梁义.磁流变半主动悬架动力学特性的试验研究[J].汽车工程,2013,35(1):72-77.FENG Zhanzong,CHEN Sizhong,LIANG Yi.An Experimental Study on the Dynamic Characteristics of a Megnetorheological Semiactive Suspension[J].Automotive Engineering,2013,35(1):72-77.
[14] 寇发荣.汽车磁流变半主动悬架系统设计与试验[J].农业机械学报,2016,47(4):280-287.KOU Farong.Design and Test of Vehicle Semiactive Suspension with MagnetorheologicalDamper[J].Transactions of the Chinese Society for Agricultural Machinery,2016,47(4):280-287.
[15] 李忠献,徐龙河.新型磁流变阻尼器及半主动控制设计理论[M].北京:科学出版社,2012:22-25.LI Zhongxian,XU Longhe.A New Type of Megnetorheological Damper and Semiactive Control Design Theory[M].Beijing:Science Press,2012:22-25.
猜你喜欢
郑州大学学报(工学版)(2023年6期)2023-10-26 08:35:28
疯狂英语·初中天地(2022年9期)2022-08-29 13:58:34
辽宁师专学报(自然科学版)(2021年1期)2021-07-21 03:17:00
装备制造技术(2020年11期)2021-01-26 00:38:58
北京理工大学学报(2020年11期)2020-12-15 04:55:50
家庭影院技术(2020年6期)2020-07-27 01:37:50
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:17
西安交通大学学报(社会科学版)(2015年6期)2015-05-20 07:26:44
振动、测试与诊断(2014年6期)2014-03-01 01:14:59
江苏大学学报(自然科学版)(2014年6期)2014-02-28 01:32:32