
基于多岛遗传算法的漂浮式风力机稳定性多重调谐质量阻尼器优化控制
2018-06-19 01:02黄致谦丁勤卫汤金桦
中国机械工程 2018年11期
黄致谦 丁勤卫 李 春 汤金桦
上海理工大学能源与动力工程学院,上海,200093
0 引言
较之固定式风力机,漂浮式风力机除受复杂的风浪流载荷影响外,还因其基础平台漂浮不固定,更易导致自身结构产生超过极限的振动和弯扭变形,还会在叶根、塔根等重要部位引起疲劳载荷[1]。这些势必会降低风力机的发电效率,严重时甚至会导致塔架屈曲、结构失效破坏和平台倾覆[2],因此如何经济、高效地减小结构的振动、弯曲,成为漂浮式风力机设计中的关键问题[3]。
目前,国内外学者针对漂浮式风力机稳定性问题开展了诸多研究。文献[4]运用有限元软件对垂荡板在漂浮式风力机Spar平台不同位置处的运动响应进行了频域和时域特性分析,结果表明垂荡板可明显提高漂浮式风力机Spar平台的稳定性。文献[5]中在漂浮式风力机Spar平台结构设计中应用螺旋侧板技术,采用势-黏结合方法研究螺旋侧板对漂浮式风力机Spar平台稳定性的控制效果,发现螺旋侧板能有效提高Spar平台稳定性。上述研究都将塔架、叶片及平台等结构视为刚体,风载荷简化为轴向推力,显然此类简化不能精确描述非定常气动载荷,更无法体现环境载荷下叶片及塔架等结构的变形、屈曲等非线性动力响应过程。
一些学者基于现有风力机控制系统,研究以叶片变桨和电机变扭矩等方式来提高漂浮式风力机的稳定性。LACKNER[6]以电机扭矩的作动方式来减小漂浮式风力机的振动及载荷。FISCHER等[7]提出一种基于加速度反馈的非线性控制方法,从理论上分析了漂浮式风力机的稳定性。上述方式虽对漂浮式风力机有一定控制效果,但仍存在叶片根部疲劳载荷过大等致命问题。
此外,若使用增加结构自身刚度的方法,如加大结构的截面尺寸或提高材料强度等级等,将导致成本大幅提高的同时,又存在许多技术难题[8]。风力机作为目前最大的旋转动力机械,由超长、超高叶片和塔架等组成,若采用主动控制方法,所需驱动力将非常巨大,故有学者提出,对大型漂浮式风力机结构宜采用被动控制方法[9]。
漂浮式风力机属典型高耸柔性结构,所需液压调频阻尼器(TLD)尺寸过大,在实际工程应用中难以实现,故研究重点主要在调频质量阻尼器(tuned mass damper,TMD)方面[10]。SI等[11]在漂浮式风力机上安装TMD,在风和波浪载荷作用下,比较不同参数TMD对风力机结构控制的有效性和局限性,证明了TMD对漂浮式风力机具有很好的减振效果。STEWART等[12]采用TMD主动控制,借助FAST软件对泊船式漂浮风力机的稳定性进行仿真分析,发现TMD主动控制可降低泊船式漂浮风力机的振动,但未考虑外载荷的作用。由于TMD控制的减振效果依赖于其调谐频率等参数设置,故在实际工程中,一旦结构振动频率发生变化,TMD系统对结构振动的控制效果会大幅度下降,偏离严重时,甚至会加剧结构的振动,导致结构破坏[13]。
多重调谐质量阻尼器(MTMD)是研究人员针对传统TMD即单一TMD(STMD)频率调谐过于敏感和鲁棒性较差等问题所研发的改进型TMD[14]。XU等[15]首次提出MTMD概念,并对MTMD性能进行研究,结果表明MTMD较STMD具有更好的减振效果。文献[16]对STMD和MTMD的动力性能进行了研究,发现MTMD在被控结构振动频率等动力参数变化时的控制鲁棒性强于STMD。
本文针对传统TMD存在的问题,提出在漂浮式风力机中应用MTMD系统,即在漂浮式风力机机舱和塔架中配置两个参数不同的STMD。进一步采用多岛遗传算法(multi-island genetic algorithm,MIGA)对所配置MTMD参数进行全局优化,算出MTMD系统最优参数。建立漂浮式风力机动力学模型,研究在不同复杂环境载荷作用下最优MTMD对漂浮式风力机减振的控制效果。
1 TMD模型及多岛遗传算法
1.1TMD模型
TMD减振系统主要由弹簧或吊索、固体质量块、阻尼器等组成,将其安装在漂浮式风力机主体结构的特定位置,通过技术手段,使其自振频率调谐与主体结构受控频率一致[17]。当主体结构受载荷作用发生振动时,TMD结构就会产生与主体结构振动方向相反的惯性力并吸收主体结构的振动能量,使主体结构的振动反应减弱,从而达到控制主体结构振动的效果[11]。
通过调整TMD系统的附加质量m、刚度k与阻尼d等参数,可使TMD系统吸收主体结构更多的振动能量,从而最大程度地减小主体结构的振动响应[16]。MTMD为解决STMD对主体结构自振频率过于敏感的问题,除在机舱中配置TMD外,还在塔架处另配置参数不同的TMD。漂浮式风力机MTMD模型及其控制原理见图1,其中,H(s)和G(s)分别为主体结构和MTMD结构的传递函数,f(t)为主体结构的初动态响应,p(t)为 TMD结构的动态响应,x(t)为 MTMD控制后主体结构的运动响应。
1.2 多岛遗传算法
MIGA算法是在传统遗传算法基础上建立的一种基于群体分组的并行性遗传算法[18]。MIGA算法将每个进化种群划分为若干个子种群,这些子种群被称为“岛屿”。在每个岛屿上对子种群独立地进行传统遗传算法操作,如选择、交叉、变异等,每个岛选定的个体定期转移到另一岛上,然后继续进行传统遗传算法操作,从而有效地抑制早熟现象,有利于找到全局最优解[19]。
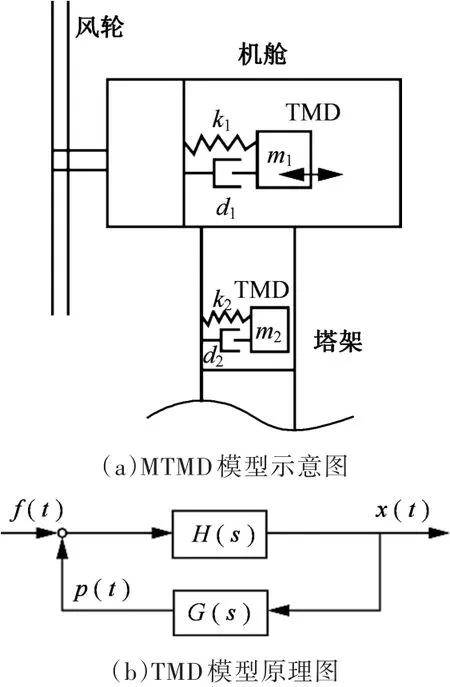
图1 漂浮式风力机MTMD模型及其控制原理Fig 1 Floating platform of wind turbine MTMD model and control principle
MIGA算法较之运算效率不高、无法并行计算的自适应模拟退火(ASA)算法,有可并行计算、计算效率高等优点;较之容易产生早熟收敛、局部寻优能力较差的粒子群优化(PSO)算法,有维持优化解的多样性、抑制早熟现象、提升包含全局最优解的机会等优点。由此,本文采用MIGA算法优化MTMD参数。
MIGA算法反复地使用算子和选择原则,从亲代到子代再到孙代直至重孙代不停地繁衍,从而种群对环境的适应性不断地升高。流程如下:①初始化群体;②计算个体的适应度函数值;③按个体适应度值决定的某种规则选择进入下一代的个体;④按概率Pc进行交叉操作;⑤按概率Pm进行变异操作;⑥若未满足停止条件,则转第①步,否则进入第⑦步;⑦输出种群中适应度值最优的染色体作为问题的满意解或最优解。MIGA流程见图2。
2 漂浮式风力机模型及动力学模型
2.1 漂浮式风力机模型
本文选用美国国家可再生能源实验室(NREL)研发的基于ITI Barge平台的NREL 5MW漂浮式风力机为研究对象。Barge平台漂浮式风力机模型及平台自由度示意图见图3,风力机和ITI Barge平台的主要参数见表 1和表 2[20-21]。

图2 多岛遗传算法优化流程图Fig 2 The flow chart of MIGA

图3 Barge平台风力机模型及平台自由度示意图Fig.3 Wind turbine model of Barge platform and schematic of platform DOF
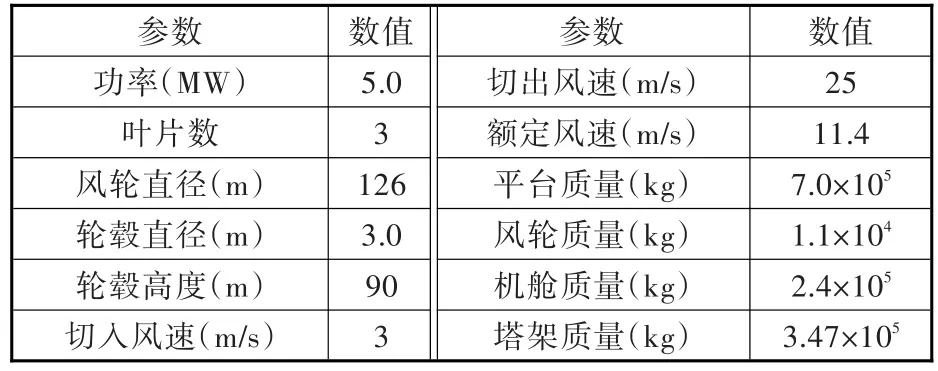
表15MW风力机参数Tab.1 Parameters of 5MW wind turbine
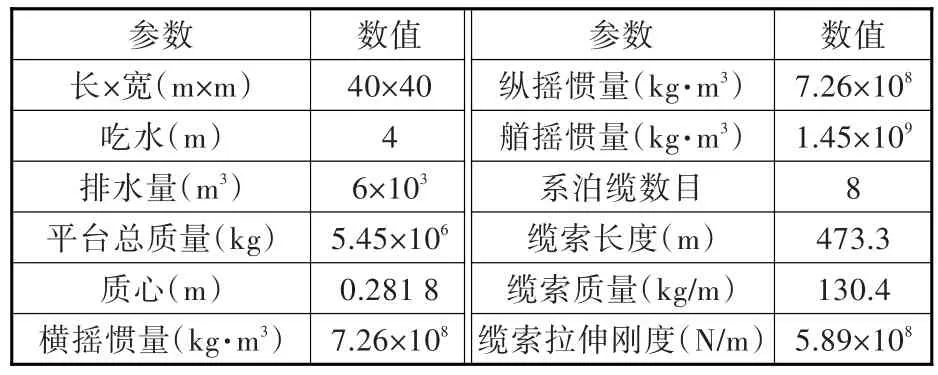
表2 ITI Barge平台参数Tab.2 Parameters of ITI Barge platform
2.2 动力学模型
Barge漂浮式平台有6个自由度,分别为沿X轴、Y轴和Z轴的平动及绕各轴的转动。由长度单位表示的平动包括纵荡、横荡和垂荡,由角度单位表示的转动包括横摇、纵摇和艏摇。
漂浮式风力机包括平台6自由度、塔架、叶片等多自由度,可视为具有N个自由度的一阶线性系统。可用 N 个广义坐标 qi(i=1,2,…,N)描述漂浮式风力机的运动,表示为广义坐标的导数q˙i(i=1'2'…'N) 组成的线性 组合;也可由 N 个广义速率ur(r=1'2'…'N)描述,表示为质点速度或刚度模态值中任意N个独立标量组成的线性组合[22]。表达式为

式中,Yri、Zr为广义坐标qi和时间t的函数。
当 ur为独立变量时,q˙i的唯一解为

式中,Wir、Xi为广义速率ur和时间t的函数。
确定广义速率后,风力机系统中任意一个刚体相对于惯性坐标系E的绝对角速度Eω(Ni)(q't)和绝对线速度Ev(Ni)(q't)表示为

式中,、分别为刚体在惯性坐标系E中的第r偏角速度和第r偏线速度;Ni为所对应的自由度。
漂浮式风力机配置MTMD系统后,会在原有动力模型上耦合新的自由度。耦合新自由度的漂浮式风力机结构动力模型方程中仅增加了和MTMD自由度相关的驱动力和惯性力项,其形式和式(1)~式(4)相同。
3 MTMD参数优化策略
3.1 优化目标及约束条件
漂浮式风力机处于复杂环境作用下,沿所设坐标系往复运动。塔顶纵向位移和平台横摇角与塔架疲劳载荷和整机发电效率相关性很大,因此将塔顶纵向位移标准差σ1和平台横摇角标准差σ2作为优化目标。以σ1和σ2之和最小为优化目标函数,即优化目标函数G=σ1+σ2。
TMD系统通过调节附加质量m、刚度k和阻尼d等参数进行振动控制。刚度

式中,fd为TMD自振频率。
将机舱处的TMD自振频率 fd调谐至漂浮式风力机固有频率处,为避免单一频率对主体结构固有频率过于敏感问题,将塔架处TMD自振频率调谐至其他频率。机舱和塔架处TMD刚度可由式(5)确定。将机舱和塔架处TMD阻尼d设置一样,为一个参数,且与机舱和塔架处的附加质量m1和m2组成变量参数。综上所述,约束条件见表3,多岛遗传算法参数设置见表4。
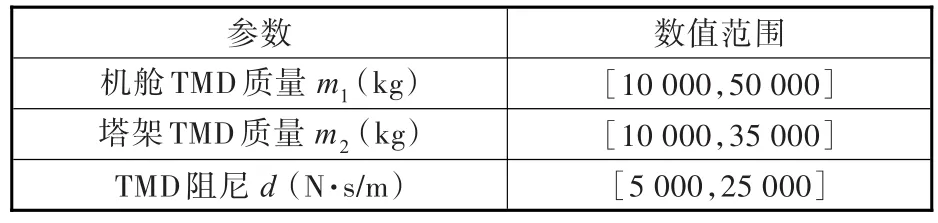
表3 约束条件Tab.3 Constraint condition
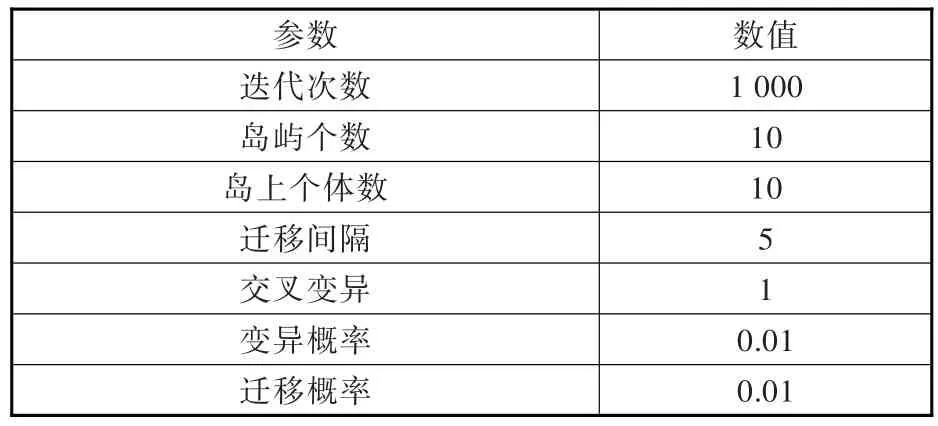
数值1 000 10 10参数迭代次数岛屿个数岛上个体数迁移间隔交叉变异变异概率迁移概率5 1 0.01 0.01
3.2 优化结果
依据3.1节中的优化目标、约束条件及算法参数设置,进行多岛遗传算法计算,所得最优参数结果见表5。优化目标函数G与运算迭代次数关系曲线见图4。

表5 最优结果Tab.5 Optimal results
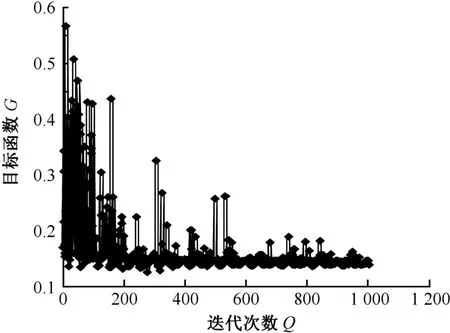
图4 迭代次数Fig.4 Number of iterations
由图4可知,在迭代次数小于200前,优化目标函数G的波动特别剧烈,在迭代次数大于200后,优化目标函数G虽有个别突变值,但大体上是趋于收敛的,说明多岛遗传算法进行了全局搜索,优化结果必然是全局优化结果。
为验证优化结果的准确性和体现MTMD优越的控制效果,依据优化结果配置MTMD参数进行计算,并与无控制和STMD结果进行比较,结果见图5。
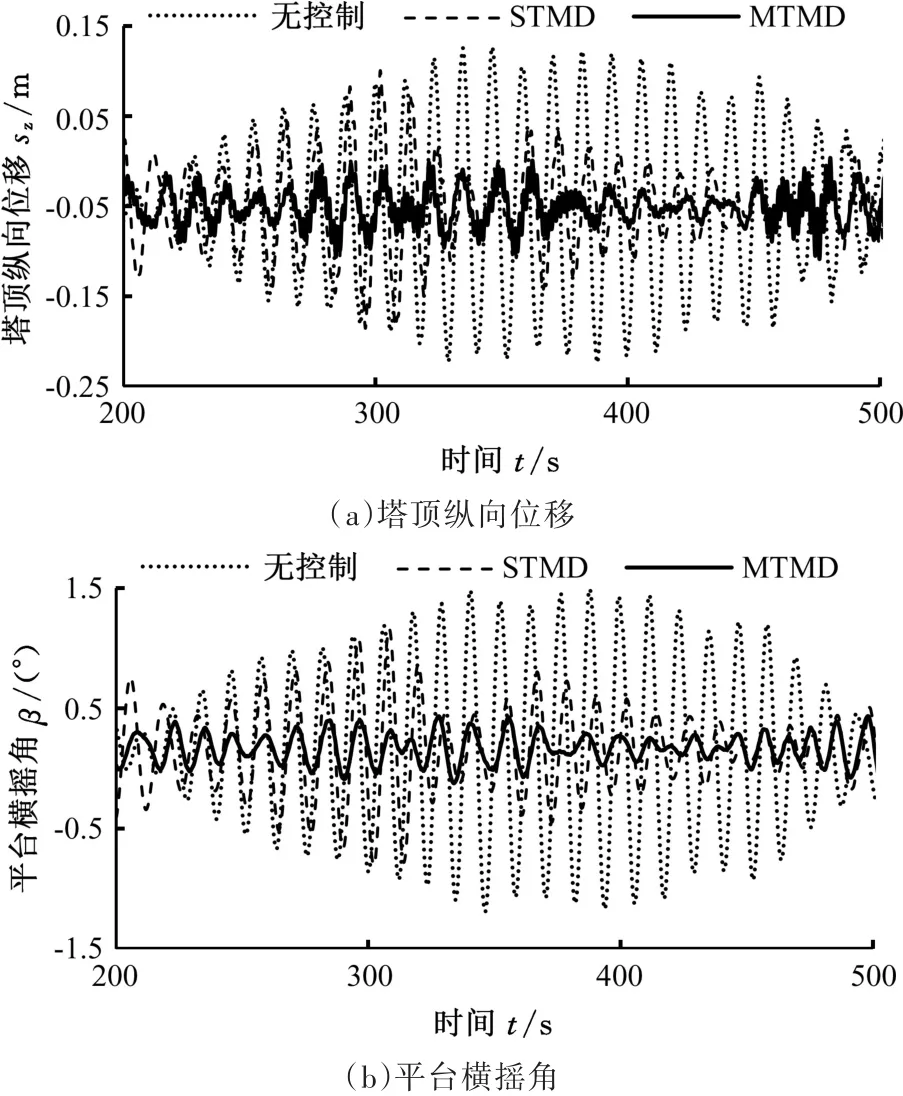
图5 塔顶纵向位移和平台横摇角时程Fig.5 Time history of the longitudinal displacement of top of the tower and roll of platform
从图5中可看出:在无控制状态下,塔顶纵向位移在-0.22~0.13 m范围内波动,平台横摇角在-1.3°~1.5°范围内摇晃;STMD 控制下,塔顶纵向位移和平台横摇角波动减小;在MTMD控制下,两者波动更是显著减小,其中塔顶纵向位移为-0.11~0.01 m,平台横摇角为-0.11°~0.43°。通过计算,无控制状态下,塔顶纵向位移和平台横摇角的标准差分别为0.097和0.749;STMD控制下,塔顶纵向位移和平台横摇角的标准差分别为0.049和0.368;MTMD控制下两者标准差分别为0.019和0.121。相较于无控制,STMD控制下塔顶纵向位移和平台横摇稳定性分别提升了49.5%和50.9%,MTMD控制下塔顶纵向位移和平台横摇稳定性分别提升了80.4%和83.8%。综上所述,STMD对塔架纵向位移和平台横摇角有良好的控制效果;MTMD控制优于STMD控制,其对塔架纵向位移和平台横摇角的控制效果更加显著。
4 不同工况下的MTMD控制
4.1 工况设计
上述优化结果只对单一环境工况进行了模拟计算,得到的模拟计算结果可能具有较大的局限性,因此需要考虑更多的复杂环境工况下MTMD的控制效果。
我国沿海海域五级浪的有义波高为2.5~4.0 m,六级浪有义波高为4.0~6.0 m,极端海况的有义波高为7.0~7.5 m。为研究MTMD在不同环境工况下的控制效果,特意选取上述3种典型海况。为达到载荷作用效果最大化,将海况峰谱频率统一取漂浮式风力机关键模态的固有频率。综上所述,不同环境工况见表6,其中工况风速高于风力机额定速度,海流为1.6 m/s。计算时长为500 s,计算时间步长为0.05 s。

表6 环境工况Tab.6 Environmental conditions
4.2 模拟计算结果及分析
为考察在上述3种典型环境工况下,MTMD对漂浮式风力机的控制效果,特选取纵向载荷(塔根纵向弯矩)、纵向位移(塔顶纵向位移、平台纵摇角)、横向载荷(塔根横向弯矩)及横向位移(塔顶横向位移、平台横摇角)为评估指标。为便于对比分析,现给出极端海况工况下,纵向位移和横向位移的时程响应控制效果以及纵向载荷和横向载荷功率谱密度控制效果,见图6~图8。各环境工况下,各项评估指标在MTMD控制时的时程响应标准差抑制率见表7。
由图6和图7可知:结构无控制时,纵向位移和横向位移随外载荷作用均有较大的波动,且波动幅度都不相同;MTMD对结构的纵向位移和横向位移都有控制效果,且对塔顶纵向位移和平台横摇角的控制效果最明显,对平台纵摇角的控制效果次之,对塔顶横向位移的控制效果最差。通过计算,塔顶纵向位移、平台纵摇角、塔顶横向位移及平台横摇角的标准差抑制率分别为73.0%、27.7%、10.8%和79.4%。
由图8可知:两者功率谱密度线的峰值频率均集中在0.2~1.0 Hz之间;MTMD控制时的塔根纵向和横向弯矩的功率谱密度峰值比无控制时的功率谱密度峰值小,塔根横向弯矩减小幅度最大,塔根纵向弯矩次之。

图6 纵向位移时程响应控制效果Fig.6 Control effect of time history of longitudinal displacement
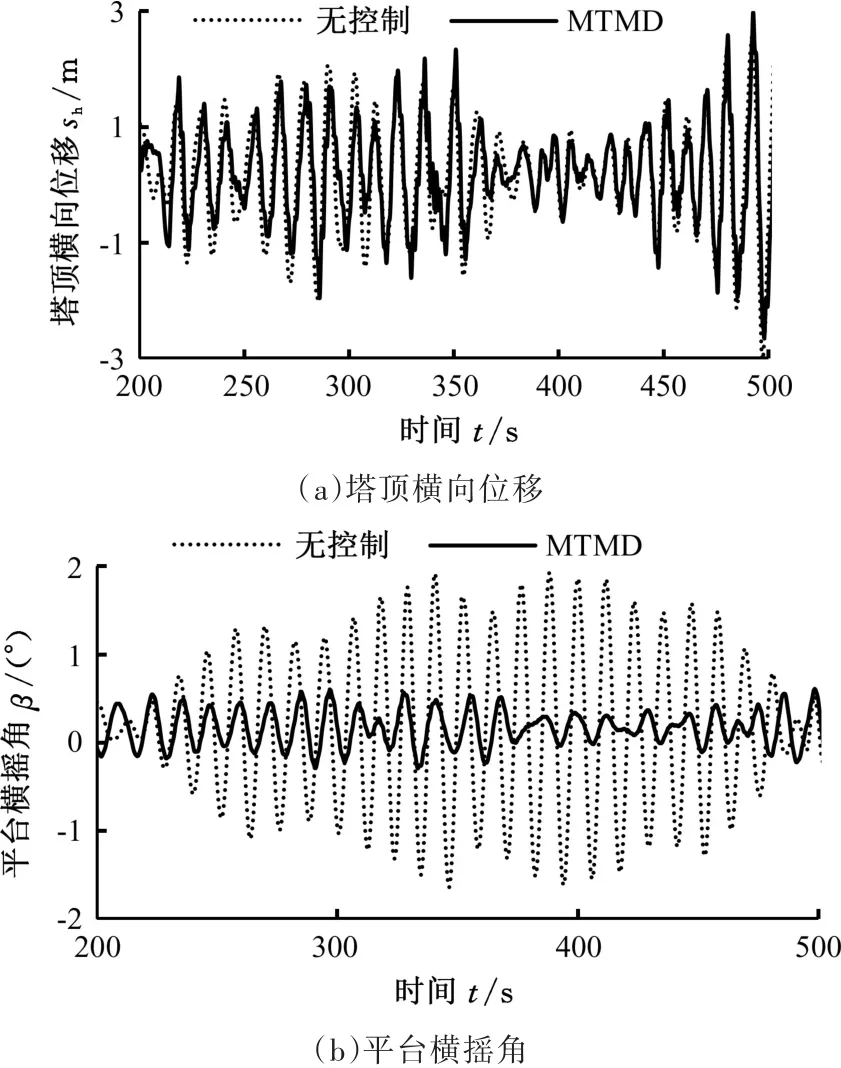
图7 横向位移时程响应控制效果Fig.7 Control effect of time history of lateral displacement
由表7可知,各评估指标的标准差抑制率在环境工况为五级浪和极端海况下均大于六级浪环境工况,说明在较为平稳工况下MTMD的附加质量更有利于结构的稳定,在极端工况下MTMD的阻尼吸能可以发挥更大的作用。不同环境工况下,结构的纵向载荷和位移的标准差抑制率分别为10.3%~12.1%和76.1%~78.3%,横向载荷和位移的标准差抑制率分别为75%~77.7%和8.9%~10.8%,说明在不同环境工况下,MTMD都对结构有着明显的控制效果。

图8 纵向载荷和横向载荷功率谱密度控制效果Fig.8 Control effect of PSD of longitudinal load and lateral load
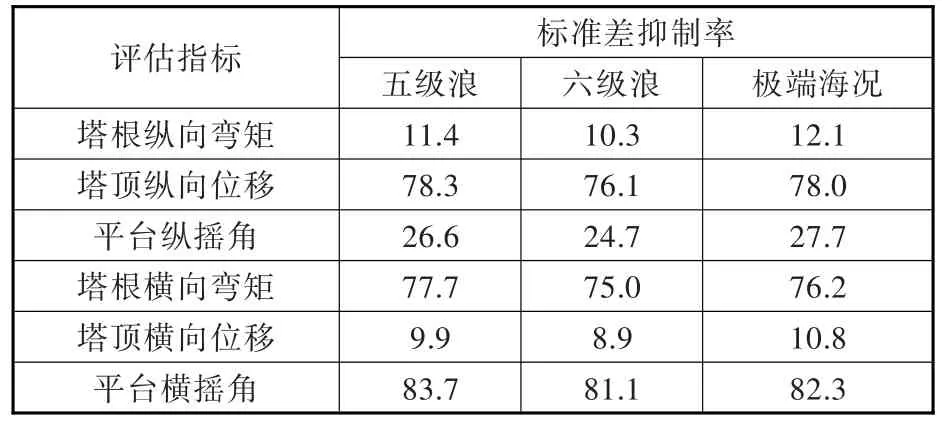
表7 MTMD控制下各参数指标标准差抑制率Tab.7 The control of each parameter index standard deviation inhibition rate under MTMD %
5 结论
(1)优化目标函数在迭代次数大于200后收敛,多岛遗传算法能够有效优化MTMD参数。
(2)STMD对塔架纵向位移和平台横摇角有良好的控制效果;MTMD的控制效果优于STMD的控制效果,它对塔架纵向位移和平台横摇角的控制效果更加显著。
(3)经参数优化后,MTMD对漂浮式风力机振动有明显的控制效果,塔顶纵向位移和平台横摇角标准差抑制率分别提升了80.4%和83.8%。
(4)MTMD对漂浮式风力机不同部位的控制效果不同,控制效果最好的为塔顶纵向位移、塔根横向弯矩及平台横摇角。
(5)不同环境工况下,MTMD都对漂浮式风力机有着明显的控制效果。
[1] MUSIAL W,BUTTERFIELD S,BOONE A.Feasibility of Floating Platform Systems for Wind Turbines[R].Golden,CO:National Renewable Energy Laboratory,2003.
[2] JONKMAN J.Dynamics Modeling and Loads Analysis of an Offshore Floating Wind Turbine[D].Denver:National Renewable Energy Laboratory,2008.
[3] NAMIK H,STOL K.Individual Blade Pitch Control of Floating Offshore Wind Turbines[J].Wind Energy,2010,13(1):74-85.
[4] 周国龙,叶舟,成欣,等.垂荡板对传统Spar平台水动力特性的影响[J].水资源与水工程学报,2015,26(4):143-148.ZHOU Guolong,YE Zhou,CHENG Xin,et al.Influence of Heave Plate on Hydrodynamic Characteristics of Traditional Spar Platform[J].Journal of Water Resources and Water Engineering,2015,26(4):143-148.
[5] DING Qinwei,LI Chun.Research on the Influence of Helical Strakes on Dynamic Response of Floating Wind Turbine Platform[J].China Ocean Engineering,2017,31(2):131-140.
[6] LACKNER M A.Controlling Platform Motions and Reducing Blade Loads for Floating Wind Turbines[J].Wind Engineering,2010,33(6):541-554.
[7] FISCHER T,VRIES W,RAINEY P,et al.Offshore Support Structure Optimization by Means of Integrated Design and Controls[J].Wind Energy,2012,15(1):99-117.
[8] 贾文强,谢双义,金鑫.基于反馈控制策略的陆上与海上风力机塔架前后振动控制效果的分析[J].西华大学学报,2015,34(6):32-36.JIA Wenqiang,XIE Shuangyi,JIN Xin.The Analysis of Tower Fore-art Vibration Control Effects for Onshore and Offshore Wind Turbines Based on the Feedback Control Strategy[J].Journal of Xihua University,2015,34(6):32-36.
[9] STEWART G M,LACKNER M A.The Impact of Passive Tuned Mass Dampers and Wind-wave Misalignment on Offshore Wind Turbine Loads[J].Engineering Structures,2014,73(3):54-61.
[10] 阎石,牛健,于君元,等.风力发电机塔架结构减振控制研究综述[J].防灾减灾工程学报,2016,36(1):75-82.YAN Shi,NIU Jian,YU Junyuan,et al.Review of Vibration Control Research of Wind Turbine Tower Structures[J].Journal of Disaster Prevention and Mitigation Engineering,2016,36(1):75-82.
[11] SI Y,KARIMI H R,GAO H.Modelling and Optimization of a Passive Structural Control Design for a Spar-type Floating Wind Turbine[J].Engineering Structures,2014,69(9):168-182.
[12] STEWART G M,LACKNER M A.The Effect of Actuator Dynamics on Active Structural Control of Offshore Wind Turbines[J].Engineering Structures,2011,33(5):1807-1816.
[13] CAI G P,SUN F,HUANG J Z,et al.Characteristic Analysis of MTMD for Seismically Excited Structures[J].Engineering Mechanics,2000,3:1008.
[14] CHUN Xiangli,XIONG X Y.MTMD Design Models and the Optimum Design Parameters for the Vibration Control of Structures[J].Building Science Research of Sichuan,2003,29(3):8-13.
[15] XU K,IGUSA T.Dynamic Characteristics of Multiple Substructures with Closely Spaced Frequencies[J].EarthquakeEngineering& StructuralDynamics,1992,21(12):1059-1070.
[16] 李春祥,杜冬.MTMD对结构刚度和质量参数摄动的鲁棒性[J].振动与冲击,2004,23(1):40-42.LI Chunxiang,DU Dong.Robustness of MTMD under Parametric Deviation of Structural Stiffness and Mass[J].Journal of Vibration and Shock,2004,23(1):40-42.
[17] 王肇民.高耸结构振动控制[M].上海:同济大学出版社,1997.WANG Zhaomin.Vibration Control of High Rise Structure[M].Shanghai:Tongji University Press,1997.
[18] 赵德建,王延奎,周平,等.基于多岛遗传算法的二维翼型吸气减阻优化[J].北京航空航天大学学报,2015,41(5):941-946.ZHAO Dejian,WANG Yankui,ZHOU Ping,et al.Optimization of Drag-reduction by Suction Using Multi-island Genetic Algorithm[J].Journal of Beijing University of Aeronautics and Astronautics,2015,41(5):941-946.
[19] 石秀华,孟祥众,杜向党,等.基于多岛遗传算法的振动控制传感器优化配置[J].振动、测试与诊断,2008,28(1):62-65.SHI Xiuhua,MENG Xiangzhong,DU Xiangdang,et al.Application of MIGA to Optimal Disposition of Sensors in Active Vibration Control[J].Journal of Vibration,Measurement&Diagnosis,2008,28(1):62-65.
[20] JONKMAN J M,MATHA D.A Quantitative Comparison of the Response of Three Floating Platforms[J].Australian Historical Studies,2010,32(3):351-355.
[21] ROBERSTON A N,JONKMAN J M.Loads Analysis of Several Offshore Floating Wind Turbine Concepts[C]//International Society of Offshore and Polar En-gineers 2011 Conference.Hawaii,2011:66-76.
[22] 洪嘉振.计算多体系统动力学[M].北京:高等教育出版社,1999.HONG Jiazhen.Calculation Multibody System Dynamics[M].Beijing:Higher Education Press,1999.
猜你喜欢
机电信息(2022年19期)2022-10-15
石油化工建设(2021年4期)2021-09-15
分布式能源(2021年3期)2021-07-31
孩子(2020年12期)2020-01-06
红领巾·萌芽(2019年3期)2019-04-18
红领巾·萌芽(2019年2期)2019-04-18
农业工程学报(2018年22期)2018-11-23
北京航空航天大学学报(2017年3期)2017-11-23
中央民族大学学报(自然科学版)(2015年1期)2015-06-11
振动工程学报(2015年1期)2015-03-01
