导弹复合控制系统的自适应控制器设计*
2018-06-13 08:20宋晓娜刘跃敏李东山
火力与指挥控制 2018年5期
刘 凯 ,宋晓娜 ,2,刘跃敏 ,李东山
(1.河南科技大学信息工程学院,河南 洛阳 471023;2.中国空空导弹研究院,河南 洛阳 471009)
0 引言
随着科技的不断发展,常规气动力导弹已经很难满足现代复杂的作战环境。因此,新式导弹通常采用直/气复合控制的方法,来实现高精度制导的作战要求。在导弹控制系统中,直接力的引用,在提高导弹控制系统过载能力的同时,也使得制导过程变得更加复杂,为控制器的设计带来了更大的挑战。针对直/气复合模型,国内外研究人员已经做出了很多的研究工作,其中美国的PAC-3和法国的Aster-30都已经实现了弹体与目标直接碰撞的实验[1-2]。
实验证明现代导弹采用的复合控制模型与传统气动力制导相比,具有过载能力大,且响应速度不受大气层内空气密度的限制,是实现导弹全空域“趋零脱靶量”的一种有效技术[3]。因此,很多研究学者针对导弹复合控制系统进行了各类问题的探索研究,其中文献[4]针对导弹复合控制系统中侧喷流干扰较大的特点,通过运用自适应遗传算法等理论,提出了一种不依赖精确数学模型的智能控制算法。文献[5]针对模型的不确定性和大气环境的干扰,提出了气动子系统的自适应滑模控制方法。文献[6]为保证导弹在气动参数变化的情况下,控制系统仍能够有较好的动态跟踪性能,提出了一种参数自适应滑模控制方法。文献[7]研究了导弹初始迅速大转弯的问题,且给出了稳定性的设计方法。文献[8]为了提高直接力控制的使用效率,采用模糊控制方法对导弹脉冲发动机的点火逻辑进行了设计。文献[9]提出了一种基于非线性干扰观察器的增强型滑模控制方法,该方法与传统的滑模控制方法相比有很好的鲁棒性,但设计过程过于复杂,计算量偏大。
本文采用自适应滑模控制,针对导弹复合控制系统,建立纵向动态化模型,做出适当的优化设计。对气动力采用滑模控制的方法进行研究,并用自适应控制理论对系统进一步优化,同时采用模糊控制对直接力部分进行设计,节省脉冲发动机燃料的使用,提高导弹的制导精度。
1 复合控制系统的数学模型
考虑到在末节制导过程中,导弹的主推发动机已经停止,并且末节制导所消耗的时间非常短,所以可以将弹体的质量m和速度v设定为常值,建立如下导弹动力学模型:

其中,α为攻角,ωz为俯仰角速度,m为弹体的质量,v为导弹速度,ai(i=1,…,5)为弹体动力学参数,式中为固体发动机到弹体质心的距离。由于的数值非常小,即系统为若非最小相位的系统[10],因此,经过适当变换后得到导弹数学模型为:

2 直接力/气动力复合控制方案
复合控制系统由直接力和气动力两部分组成,其中以气动力设计为基础,保证导弹飞行中的稳定性,消除复合控制产生的耦合效应,提高控制系统的鲁棒性。而直接力控制的目的是增加导弹的过载能力,减小系统的响应时间。直接力/气动力复合控制系统的结构图如图1所示。
图1 直接力/气动力复合控制系统结构图
2.1 气动力控制方案
气动力控制系统设计,采用自适应滑模变结构控制方法[12],来增加复合控制系统的稳定性,减少不确定干扰对制导系统的影响,同时由于过载可以通过测量得到,因此,可以将式(1)和式(2)变换后得到:

设过载指令为Nyc,目的是确定合适的输出指令Ny,能够跟踪期望过载Nyc,令过载跟踪误差为e=Ny-Nyc,则可以通过设计适当的控制律δz,能够使得。
选取切换面为:

对式(4)两边求导可得:

为了保证在有限时间内到达切换面,采用指数趋近律;

将式(5)与式(6)联立可得
为了避免滑模控制引起的抖动问题,采用自适应控制理论对ξ进行估计,为估计值,可以由自适应算法式(8)得到

证明:取李雅普诺夫函数为:

式中,为估计值误差,且。
将式(9)两边求导得:
将式(7)带入式(10)中可得:
由式(8)可得:
则复合控制系统渐进稳定,系统内所有值在设计范围内有界,证毕。
2.2 直接力控制设计
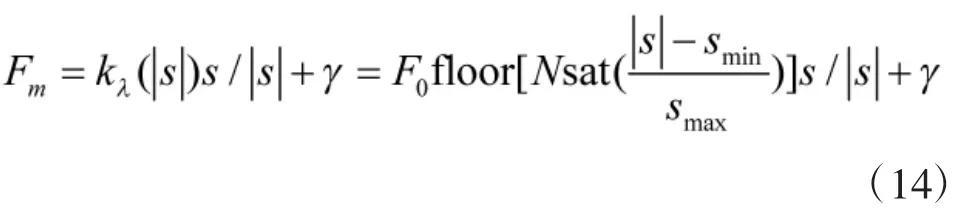
取直接力切换控制为:
由于在滑模控制的切换项中,符号函数sgn(·)在一定程度上会引起系统的抖振,影响系统的稳定行,因此,采用连续函数s/|s|+γ来替换符号函数sgn(·)的方法,减少系统抖振问题,则可以得到:
其中,γ为引入的一个小量,目的是为了提高直接力的使用效率,接下来采用模糊控制的方法对γ进行设计。
从复合控制系统的过载响应可以看出,过载误差e=Ny-Nyc,能够反映复合控制系统的指令跟踪性能。在此,把e=Ny-Nyc和作为模糊控制的输入,γ为模糊控制的输出,模糊控制集为:
{NB(负大),NM(负小),ZO(零),PM(正小),PB(正大)}
其中,输入e,和输出γ采用三角函数作为隶属度函数,输出γ如图2所示。
在复合控制系统中,过载误差e反映了系统的跟踪精度,如果误差e=Ny-Nyc为PB,此时需要设定较大的直接力控制量,来减少这种趋势。另外,如果过载误差变化律为PB或PM,则误差仍然在变大,也应增强直接力的控制,所以将γ设置为PB,同理,如果为NB或NM说明,误差在逐渐变小,不需要在加强直接力Fm的控制量,可以将γ设置为PM;若e为PM,则γ为NM或NB,若误差变化律为ZO,则不需要改变直接力控制量,这时γ应选择ZO。

图2 模糊输出隶属函数

表1 模糊控制规则表
进一步分析可知,当取值过大时需要更多的固体发动机提供推力,这样一方面会降低脉冲发动机的使用效率。另外一方面,会加大复合控制系统的不稳定性。因此,为了提高系统的响应速度,保证复合控制的精度取关于的函数;

整理后可得:
到此,直接力控制系统设计完毕。
3 仿真结果
本文采用MATLAB软件对导弹复合控制器进行仿真分析,首先针对式(3)数学模型
选取导弹末节速度为V=1000 m/s,g=10 m/s2,固体发动机最大推力值为F0=5000 N,直接力的动态工作时间 =0.005 s,固体发动机到弹体质心距离为l=1 m。其次,复合控制器中k=-15,N=5,Smin=2.0,Smax=10.0,过载指令Ny=25。为了验证加入自适应模糊滑模控制的效果,选取正弦函数作为直接力输入信号,与自适应模糊滑膜控制作对比,仿真结果如图3~图5所示。其中虚线部分为滑膜控制响应,实线部分为自适应模糊滑模控制响应曲线。
最后,由于在制导过程中直接力的开启与关闭,对导弹的飞行姿态产生很大的影响,因此,把固体发动机的开与关作为扰动输入,选取正弦函数来实现。由图6可知,制导指令发出后,由固体发动机的开与关和滑膜控制引起的扰动,使得复合控制系统在跟踪过载指令过程中会引起一定的抖动。而采用自适应模糊滑膜控制方法,使复合控制系统的性能大幅地提高,系统能够快速跟踪过载指令,且能够有效避免复合控制系统的抖动问题。
通过上述仿真结果可以清晰看出,所设计的复合控制器,对系统给出的过载指令具有很好的跟踪效果,自适应模糊控制的采用,有效地提高了控制系统的稳定性,同时,直接力的引入大幅缩短了系统的响应时间,提高了制导的精度。
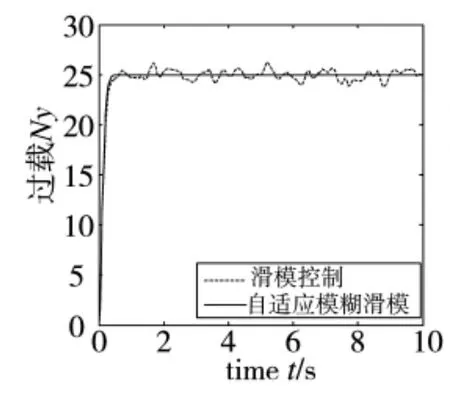
图3 过载跟踪响应
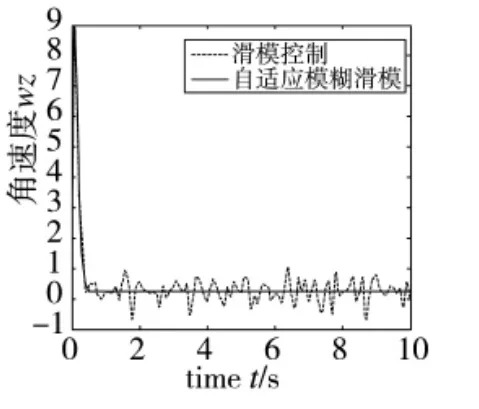
图4 俯仰角速度响应
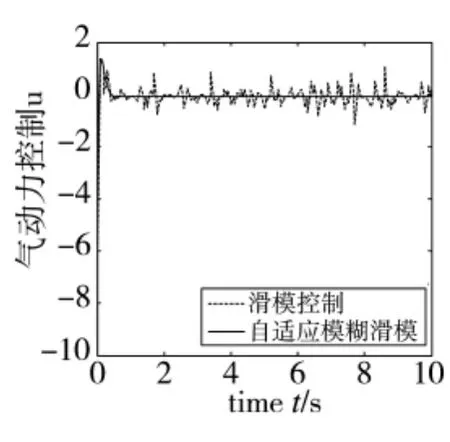
图5 气动力控制

图6 固体发动机消耗个数
4 结论
本文针对姿控式复合控制系统进行了研究,首先对其数学模型进行了适当的调整,在此基础上,运用滑模控制理论对气动力部分进行了设计,并采用自适应控制理论对其进行了参数优化。其次,进一步采用模糊控制理论方法,对直接力部分进行设计。最后对所设计的导弹复合控制器,进行了仿真验证,从仿真结果中可以清晰地看出,通过对控制系统的合理分配,可以在保证系统稳定的同时,提高系统响应速度以及发动机的使用效率。
[1]王晖娟.美国陆军下一代PAC-3导弹成功拦截靶弹[J].战术导弹技术,2011,32(3):37-37.
[2]储蔚,野舟.PAC-3导弹拦截巡航导弹目标试验获得成功[J].飞航导弹,2012,42(5):1-1.
[3]雷虎民,张旭,董飞垚,等.零控脱靶量有限时间收敛制导律[J].国防科技大学学报,2015,37(3):136-141.
[4]史震,马文桥,王飞,等.直接力/气动力复合控制导弹智能控制算法 [J].南京理工大学学报,2014,38(4):481-489.
[5]邵雷,雷虎民,赵宗宝,等.直接侧向力/气动力复合控制影响因素研究[J].飞行力学,2015,33(1):57-60.
[6]WEI M,RUI S,HONG Y,et al.Adaptive sliding mode BTT autopilot for cruise missiles with variable-swept wings[J].哈尔滨工业大学学报(英文版),2014,21(2):33-42.
[7]李稀媛,敖百强,赵明元.导弹初始大角度转弯复合控制研究[J].现代防御技术,2014,42(5):65-69.
[8]滕江川,吴晓燕,陈永兴,等.基于模糊控制理论的脉冲推力器点火算法[J].四川大学学报(工程科学版),2011(s1):194-198.
[9]LEE H,HUANG X,YIN H.Enhanced sliding mode control for missile autopilot based on nonlinear disturbance observer[C]//International Joint Conference on Computational Sciences and Optimization,IEEE,2009:210-213.
[10]王明东,季田,刘宪林.非最小相位系统的灰色去余控制[J].控制工程,2013,20(6):1074-1076.
[11]廖海波.基于反演法的某制导迫弹鲁棒自适应控制器设计[J].兵器装备工程学报,2016,37(5):70-73.
[12]ZHAO F,UTKIN V I.Brief paper:adaptive simulation and control of variable-structure control systems in sliding regimes[J].Automatica,1995,32(7):1037-1042.
[13]朱 枫,韩晓明.地空导弹战场适应能力评估研究[J].火力与指挥控制,2016,41(9):74-79.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年35期)2022-01-14
建材发展导向(2021年14期)2021-08-23
科技视界(2021年7期)2021-04-13
成都信息工程大学学报(2021年6期)2021-02-12
北京航空航天大学学报(2020年3期)2021-01-14
航空学报(2020年9期)2020-12-01
电子制作(2019年16期)2019-09-27