基于亚像素边缘检测的圆定位技术的研究与应用
2018-06-08 07:17张璐孔凡国
五邑大学学报(自然科学版) 2018年2期
张璐,孔凡国
基于亚像素边缘检测的圆定位技术的研究与应用
张璐,孔凡国
(五邑大学 机电工程学院,广东 江门 529020)
自动插件机;模板匹配;Zernike矩;亚像素边缘;稳健最小二乘法

1 定位孔区域粗定位
虽然自动插件机所要生产的PCB种类繁多、视场背景复杂,但其视场区域大小不会改变,故传送带上PCB所在的位置变化不大. 利用模板匹配法对基准圆区域进行粗定位,以获取含有圆形孔的感兴趣区域. 首先需要创建待插件PCB的标准模板,一般而言,模板越小其响应速度越快,综合考虑算法的运行时间与定位效果,当目标区域占模板大小的30%~50%时,定位效果最佳. 常用的模板匹配算法有:归一化平方差匹配法、归一化相关匹配法、归一化相关系数匹配法[6].

归一化相关系数匹配法中1表示完美匹配;-1表示最差匹配:
对上述3种算法进行PCB样本图片的测试验证发现,归一化相关系数匹配法的效果最佳. 本文采用此算法对目标区域进行提取,获得如图1所示的定位孔位置(右上角矩形方框表示). 本PCB定位孔并不是标准的基准点,且位置靠近PCB边缘处,定位孔特征如下:1)其外圈有白色实线圆;2)中间白色区域为通孔,可透射下方亮板的光线.
2 粗定位区域图像预处理
粗定位采集到的图像边缘模糊且包含了许多无用的背景,这会对后期的高精度定位造成影响,因此滤除不必要的背景是非常必要的.
2.1 平滑处理
高斯滤波能够很好地抑制噪声,其运算速度和平滑效果能够达到自动插件机图像预处理的要求. 本文采用模板大小为9×9的高斯滤波器进行图像平滑处理,其公式为:


2.2 定位孔区域的提取
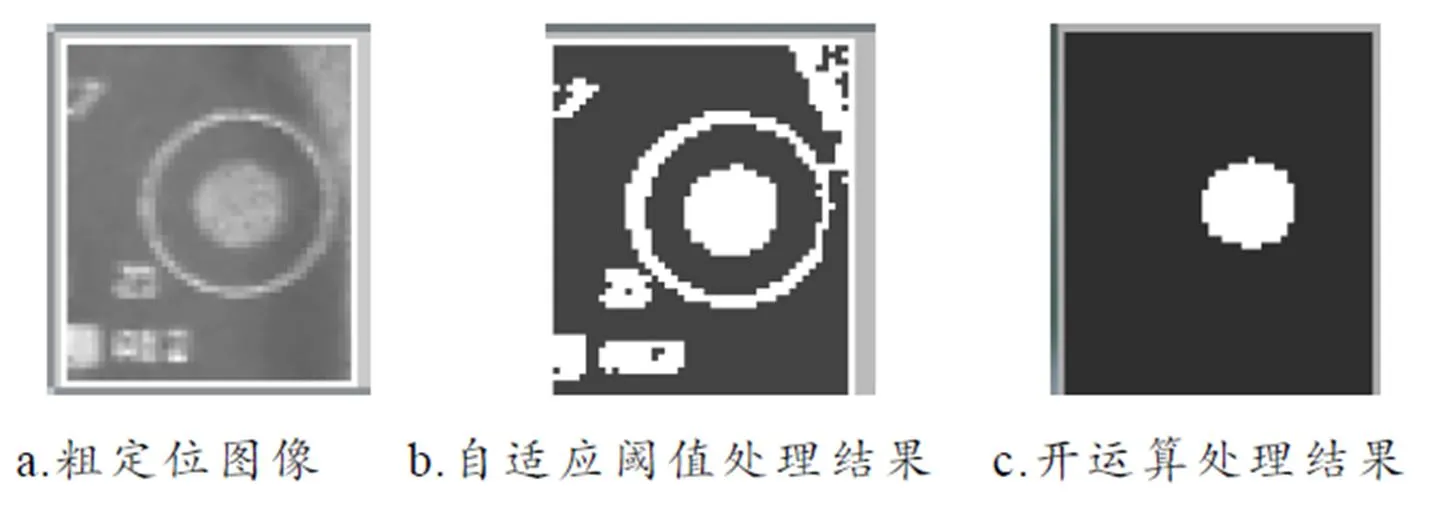
图2 定位孔区域图像的提取
3 定位孔边缘轮廓的提取
3.1 像素级定位孔轮廓边缘的提取
1)利用二维高斯滤波器对灰度图像进行滤波平滑;
3)对图像梯度幅值进行非极大值抑制;
4)用双阈值算法检测和连接边缘[7-8].
3.2 亚像素级定位孔轮廓边缘的提取
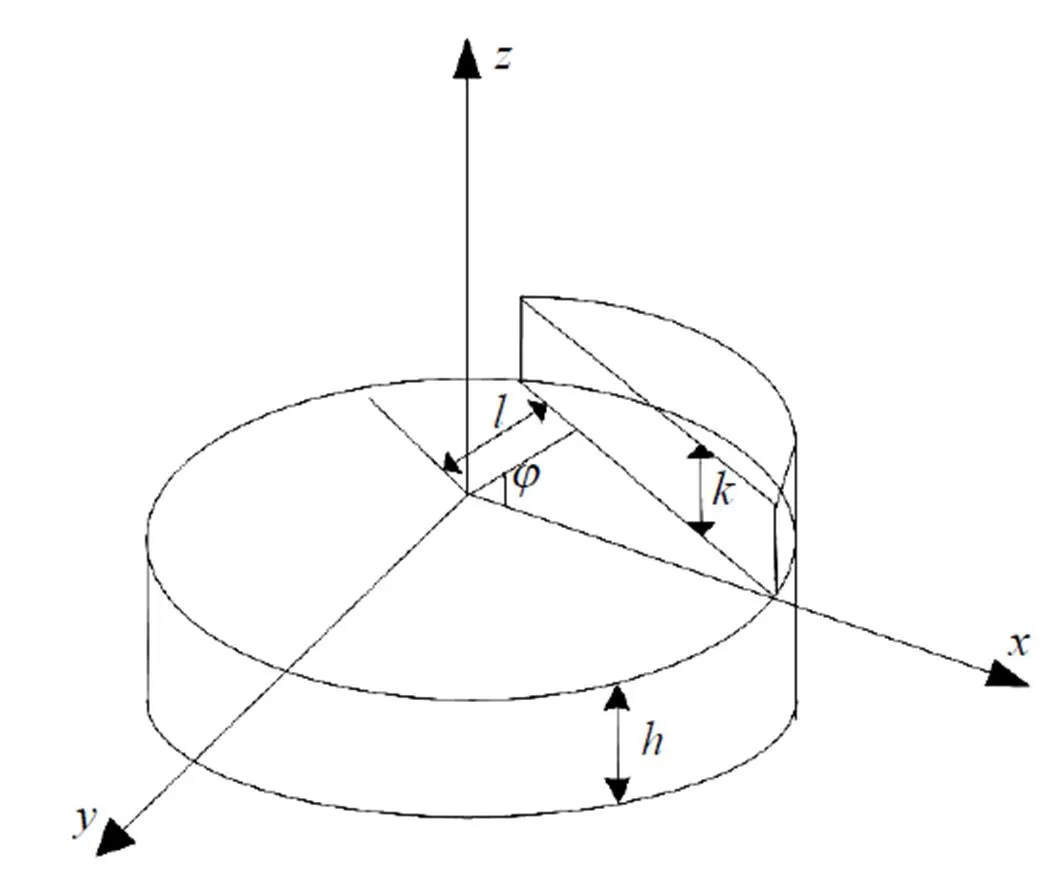
图3 亚像素边缘阶跃模型

4 定位孔区域精密定位
4.1 稳健最小二乘拟合圆算法求取基准点中心坐标
亚像素边缘提取之后,仍然不可避免地会残留一些干扰边缘及伪边缘点. 在高精度拟合过程中必须去除这些干扰,以得到最佳的圆形边缘轮廓. 本文以一般最小二乘拟合圆为基础,利用一种稳健最小二乘拟合圆算法[15]来实现精密定位. 算法通过计算拟合数据点的正交距离残差来去除离群点,具体步骤如下:
1)最小二乘法初步拟合亚像素边缘点,以获得圆心坐标及半径的初始值.

4)将去除离群点之后的数据重新进行最小二乘圆拟合,更新圆心坐标及半径值.
4.2 仿真验证与分析
为检验本文算法的有效性,利用计算机生成不同程度缺陷的图像,圆心坐标为(275.5,274.5). 由于篇幅所限,仅列出如图5所示的4组图,图中十字形标记为拟合圆圆心所在的位置,圆圈为所拟合的圆,可以看出,本文算法拟合效果良好.
表1显示了定位算法的实验结果(仅列10组数据). 由表1数据可知:1)算法对噪声以及干扰点具有高效的鲁棒性;2)图像质量的好坏会影响定位精度,当缺陷不大或噪声很少时,定位误差在0.05个像素以下;当图像质量严重不好时,定位误差达0.2个像素,误差均值为0.1个像素.
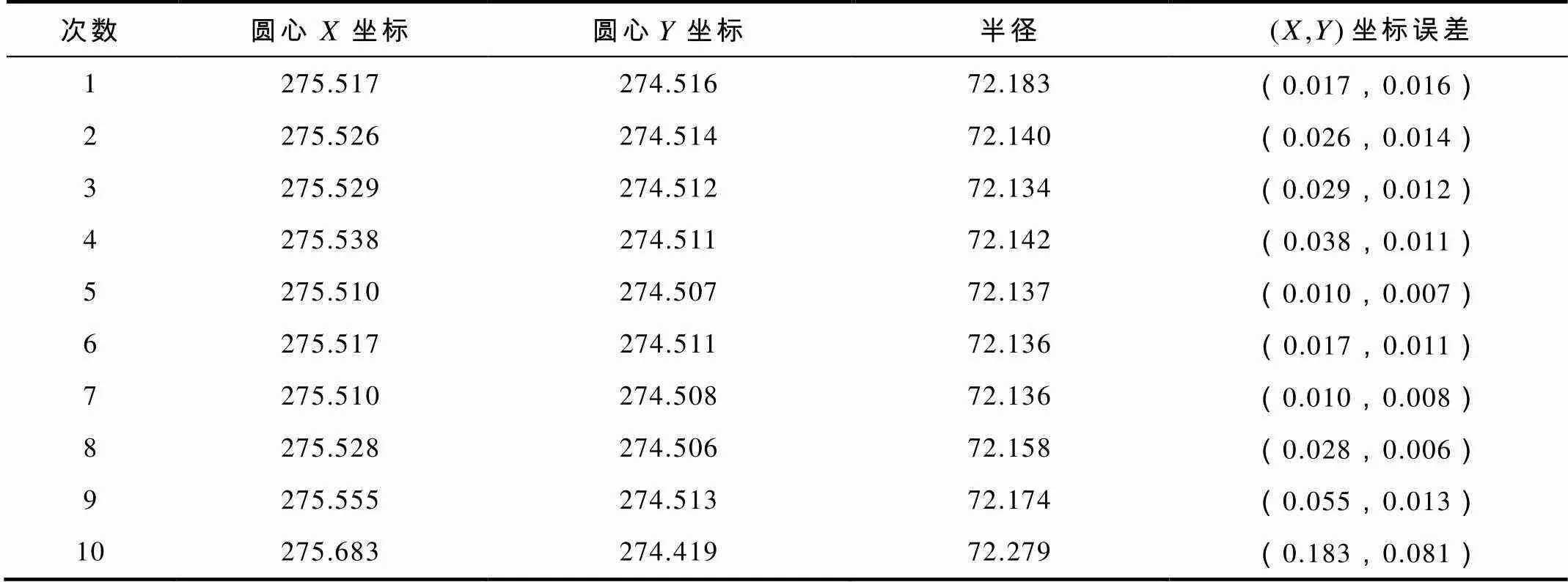
表1 重复性实验数据
在亚像素边缘提取过程中还是会出现一些干扰及边缘缺陷,直接利用这些数据拟合圆心坐标难免会造成偏差,所以就需要通过稳健最小二乘拟合圆算法来剔除干扰点以便进行最后的拟合定位.
5 PCB定位实验
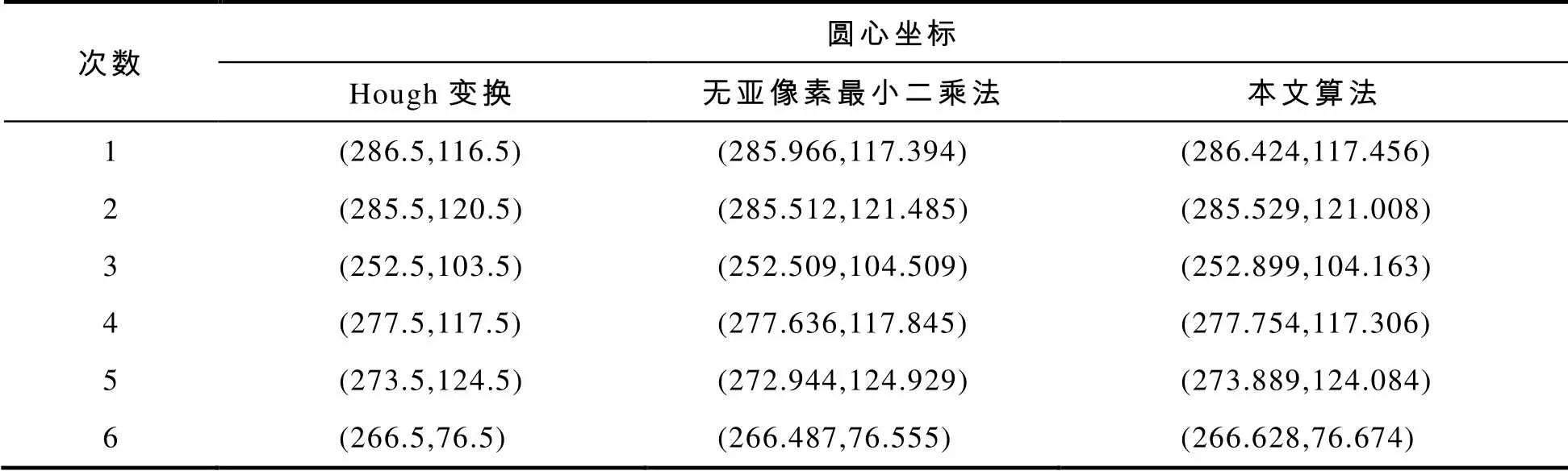
表2 PCB定位实验数据
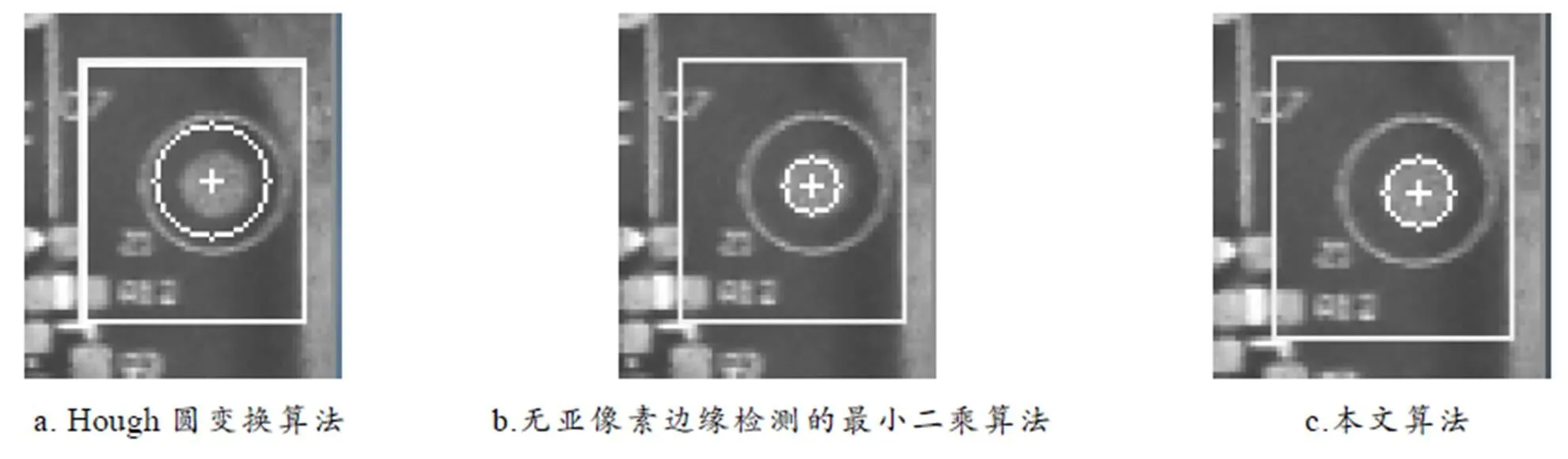
图6 PCB定位结果
6 结语
本文研究的针对PCB定位孔的算法具有速度快、鲁棒性强、定位精度高的特点,其良好性能体现在:
1)针对背景复杂、PCB种类繁多的问题,模板匹配算法能够快速地找到目标区域,对PCB图像上光照强度均匀变化以及旋转角度较小的情况,其适应性较强.
2)在提取定位孔区域的过程中,针对感兴趣区域中的噪声及小物体采用开运算去除这些干扰.
本文算法具有较好的定位效果,并能较好地抑制噪声等干扰问题,对电子元器件组装行业提高生产效率、降低工人劳动强度有着实际的应用价值. 但本算法对PCB旋转角度较大的情况以及图像缩放并不具备鲁棒性,后续将会对旋转缩放的图像匹配算法进行研究.
[1] 黄震,顾启民.高精度机器视觉插件系统的研究与应用[J]. 组合机床与自动化加工技术,2014(10): 105-108.
[2] 曾友,高健,岑誉. PCB基准点的探针式鲁棒定位方法[J]. 组合机床与自动化加工技术,2016(6): 30-34.
[3] 柏长冰,齐春,宋福民,等. Hough变换快速检测圆形PCB Mark[J]. 光电工程,2005, 32(9): 75-78.
[4] 夏奇,周明采,汪宏晟,等. 高精度自动贴片视觉对准系统及其图像处理[J]. 光学技术,2004, 30(2): 146-149.
[5] 游江,唐力伟,邓士杰,等. 基于邻域贡献权值细化的圆心亚像素定位算法[J]. 光学技术,2017, 43(2): 138-143.
[6] 毛星云,冷雪飞. Opencv3编程入门[M]. 北京:电子工业出版社,2015.
[7]CANNY J. A computational approach to edge detection [J]. IEEE Transaction on Pattern Analysis and Machine Intelligence, 1986, 8(6): 679-698.
[8] 吉玲,杨亚,付珊珊,等. 一种改进的Canny边缘检测算法[J]. 微处理机,2015(1): 40-43.
[9] 夏阳阳. 无粗定位亚像素边缘检测算法研究[D]. 上海:上海师范大学,2015.
[10] 陈辉. 图像边缘检测技术的研究[D]. 哈尔滨:哈尔滨工程大学,2012.
[11] LYVERS E P, MITCHELL O R, AKEY M L, et al. Subpixel measurements using a moment-based edge operator [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1989, 11(12): 1293-1308.
[12] GHOSAL S, MEHOTRA R. Orthogonal moment operators for subpixel edge detection [J]. Pattern Recognition, 1993, 26(2): 295-306.
[13] 高世一,赵明扬,张雷,等. 基于Zernike正交矩的图像亚像素边缘检测算法改进[J]. 自动化学报,2008, 34(9): 1163-1168.
[14] 曲迎东,李荣德,白彦华,等. 高速的9×9尺寸模板Zernike矩边缘算子[J]. 光电子激光,2010, 21(11): 1683-1687.
[15] 王玉花. 稳健正交最小二乘拟合法[J]. 佳木斯大学学报(自然科学版),2013, 31(1): 125-128.
[责任编辑:熊玉涛]
Research on and Application of Circle Location Technology Based on Sub-pixel Edge Detection
ZHANGLu, KONGFan-guo
(Electromechanical Engineering College, Wuyi University, Jiangmen 529020, China)
In the process of visual positioning of the automatic plug-in machine, in view of the requirement of fast and high precision positioning requirement for the circular location hole in the printed circuit board (PCB), the rough location of the target area is first made by the template matching method, and the target area of the coarse positioning is set as the region of interest (ROI), and then through image preprocessing technology, the edge profile of location holes is obtained.Subsequently, the edge detection based on Zernike moment is used to extract sub-pixel edges. Finally, a robust and high accuracy least square fitting circle method is adopted to obtain the central coordinate of the reference point. The experimental results show that the total time spent by the automatic plug-in machine vision positioning system is about 120 ms, and the average positioning error is about 0.1 pixel,which meet the requirements of the rapid plugging-in of the automatic plug-in machine.
automatic plug-in machine; template matching; Zernike moment; sub-pixel edge; robust least square methods
TH161;TP29
A
2017-11-07
张璐(1991—),男,江西上饶人,在读硕士生,主要从事机器视觉及智能检测方面的研究;孔凡国,教授,博士,硕士生导师,通信作者,主要从事数字化设计制造、机电控制、CIMS应用、制造业信息化等方面研究.
1006-7302(2018)02-0060-07
猜你喜欢
小哥白尼(军事科学)(2022年2期)2022-05-25
红领巾·萌芽(2019年8期)2019-08-27
中等数学(2018年1期)2018-08-01
中国与非洲(法文版)(2017年10期)2017-11-23
通信产业报(2016年44期)2017-03-13
CHIP新电脑(2016年3期)2016-03-10
数学教学通讯·初中版(2014年1期)2014-02-14
数学大世界·初中生辅导版(2010年2期)2010-03-08
数学教学(2009年12期)2009-01-20
雕塑(1999年2期)1999-06-28