
六足机器人爬行腿结构优化设计仿真研究
2018-06-04 12:49姚明超焦慧锋
机械工程与自动化 2018年3期
姚明超,倪 天,焦慧锋
(中国船舶科学研究中心 深海载人装备国家重点实验室,江苏 无锡 214082)
0 引言
六足爬行机器人是一种融合了仿生技术以及电控技术的新型机器人,拥有较好的平衡性、冗余性和较高的容错率[1]。足式机器入的立足点是离散的,跟地面接触面积较小,在地表面极不规则的情况下,能够通过足端支撑点的选择使其行走自如,实现避障、越障等功能[2]。由于仿生机器人肢节众多,如何实现结构优化,提高综合性能是极其重要的[3]。现有的六足机器人,其腿部结构比例大多是仿照生物来进行确定的,然而仿生机器人的腿部结构以及驱动方式较实际生物又有不同程度的变化。为了避免机器人腿部长度选取的主观性,刘海清以灵活性为目标函数,优化了足式机器人腿部结构的设计[4]。陈诚通过ADAMS仿真分析了腿部结构对机器人行走能耗的影响[5]。柳天虹等基于机器人的稳定性要求,完成了控制参数以及机体结构参数的优化[6]。但对于腿部结构优化来说,设计过程中考虑的目标参数较为单一,且均未考虑实际使用过程中存在的腿部减振机构对机器人综合性能的影响。因此,本文以腿部结构比例的优化配置为目标,综合考虑了躯体活动范围、机体运动能耗以及负载能力因素,利用数值分析以及仿真建模技术,分析了减振优化后爬行机器人在三足步态下足端受力情况,并在此基础上获得综合指标,得到腿部长度优化配置方案。
1 腿部结构优化设计
本文研究了腿部各节长度变化对六足机器人主要特性指标的影响,并通过指标的融合来选取合适的腿部结构参数。根据昆虫腿部结构与身体的比例,初步设定六足机器人腿部结构长度,并建立仿真模型。加装足端减振装置,分别分析腿节长度比例对机器人各参数的影响,最后得到腿部长度优化配置方案,其优化流程如图1所示。
1.1 减振模型设计
机器人足部设置弹簧减振装置,可以有效防止机器人上设备受到强烈冲击,延长设备使用寿命[7]。机器人在初始状态时,六条腿同时着地,共同承担机体重量,各腿的弹簧预紧力Fyu为:
(1)
其中:m为机器人总质量;α为机械腿与水平面所成夹角。爬行机器人采用三足步态,根据能量守恒定律可以计算得到弹簧的弹性系数k:

(2)
其中:v为机器人行走的速度;s为弹簧的形变量。
通过计算得到的弹簧预紧力及弹性系数,可以得到弹簧预紧量lyu:
(3)
1.2 动态仿真
六足机器人机械腿采用矩形布置,左右对称地布置在机器人两侧。机械腿主要由基节、股节、胫节、缓冲机构组成。基节与机器人底部基座相连,绕垂直于机器人底部平面的轴前后摆动;股节与基节相连,绕与基节转轴相互垂直的轴转动;胫节与股节及足端相连,绕与股节转轴相平行的轴转动。机器人单腿结构如图2所示。
图2中L1、L2、L3分别为基节、股节和胫节长度。根据文献[8],机器人基节长度越短越好,且其结论符合实际昆虫类生物基节长度都较短的规律。因此将文中优化过程简化为单控制变量的分析系统,基节长度尽量取短,以股节长度为自变量,胫节长度为因变量。等距遍历不同腿节长度的组合,统计仿真模型在不同长度组合下的特征数值解,计算得到六足机器人的各组性能指标。
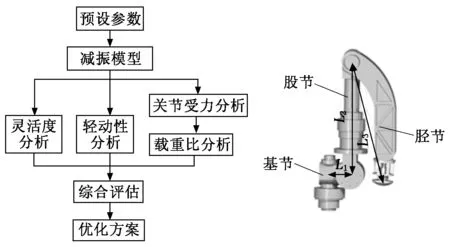
图1 六足机器人腿节长度优化流程 图2 机器人单腿结构示意图
1.3 灵活度指标
躯体灵活度概念可以很好地表示机器人躯体的可活动范围,通过测量躯体在大地坐标系各坐标轴上的最大位移以及最大偏移角度来量化表示机体位姿的变化范围,灵活度函数FD为:
(4)
其中:L为机械腿的总长度;{Xf,Yf,Zf,αf,βf,λf}分别为机体沿X、Y、Z轴的位移变化量和角度变化量,并且有:
(5)
灵活度函数FD的值越大,表示机器人躯体的可运动范围越大。
1.4 轻动性指标
对于足式机器人,其运动过程中能量的转化效率普遍低于轮式以及履带式机器人。为了优化步行机器人能耗,本节对比了机器人在不同腿节长度情况下的能量利用效率。引入机器人轻动性的概念,用来评价步行机器人行走时是否轻巧省功[9]。将比耗ε作为机器人轻动性量化评判的目标函数,即:
(6)
其中:Q为机器人在行走过程中的系统能耗;S为前进的总距离。比耗反映了单位质量的机体在单位前进距离下的功率消耗情况。
1.5 载重比指标
载重比表示机器人可承受的最大负载与机器人重量的比值[10],载重比越大表示机器人在关节参数不变时承载能力越强。通过仿真模型可以模拟机器人腿节长度对机器人载重比的影响。
通过计算得到固定步态行走过程中受力最大的关节,得到其可承受最大扭矩Tmax,机器人载重比RW可以表示为:
(7)
其中:T0为选用关节最大额定扭矩。
1.6 综合优化分析
为了综合考虑本文中的量化指标,首先对各指标分别进行归一化处理,根据具体需要确定各参数的重要度系数,优化设计目标函数FB如下:
(8)
其中:λ1、λ2、λ3分别为机体灵活度、轻动性以及负重能力指标的重要度系数。对于取值越大越好的特征指标,重要度系数取正值;反之,取负值。根据特征指标的相应意义,灵活度越大,比耗越小,载重比越大,机器人的运动学和动力学性能越好。
2 ADAMS仿真分析
2.1 ADAMS建模
仿照生物躯体与腿部的比例,预设基节L1=150 mm、股节L2=800 mm、胫节L3=900 mm。其中基节长度受到基关节和髋关节处驱动装置和传动装置尺寸的约束,故不能像昆虫基节长度那样小。
根据六足爬行机器人的基本参数,建立ADAMS仿真模型,如图3所示。
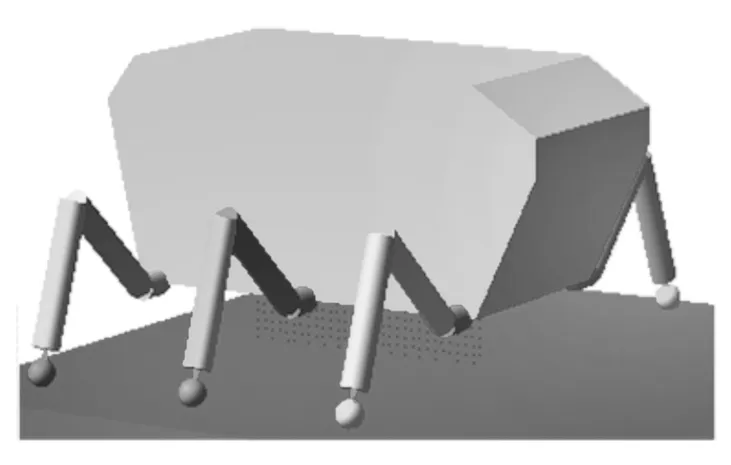
图3 六足机器人ADAMS仿真模型
2.2 灵活度优化
考虑到基关节的电机传动机构尺寸,设置基节长度为150 mm,保持股节、胫节总长为1 700 mm。以股节长度为自变量进行分析,设定取值范围为[450,1 150]mm。设置基关节转动角度在[-30°,30°]之间,髋关节和膝关节转动角度在[10°,90°]之间。机器人躯体灵活度与股节长度的关系如图4所示。
从图4中可以看出,机器人股节长度在700 mm~800 mm时,躯体灵活度随股节长度的变化较平缓,机器人灵活性较好。
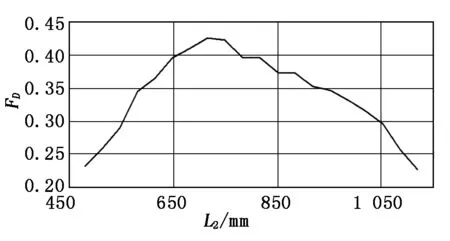
图4 机器人躯体灵活度与股节长度的关系
2.3 轻动性优化
在仿真过程中,保持股节与胫节的总长度不变,则模型质量恒定。仿真过程中,保持行走总距离不变,则总能耗就能反映系统的相对能耗情况。图5为不同股节长度情况下机器人能耗曲线。
虽然能耗曲线存在小范围的波动,但从图5中可以看出:当股节长度在700 mm~850 mm之间,机器人的能耗相对较低,轻动性较好;对于无减振装置的六足机器人来说,其能耗相对较大。
2.4 载重比优化
六足机器人在行进过程中只有在足端接触地面时才会产生接触反力。将同时触地的左侧前后足与右侧中足作为一组进行分析,机器人足端的受力情况如图6所示。
仿真过程中六足机器人步行周期为3 s,第二个周期后开始前进,运动3个周期后停止运动。在起始状态时,由于减振弹簧系统的原因,足端接触力在开始的1 s内产生了振荡情况,但并不影响后续行走过程中关节的转动情况以及受力分析。从图6中可以看出,中足的受力较大,前后足的受力之和与中足受力相近。
取中足进行分析,中足的三个关节所受驱动力矩情况如图7所示。

图5 机器人轻动性与股节长度的关系 图6 足端受力情况 图7 中足各关节驱动力矩曲线
从图7中可以看出,髋关节驱动力矩要大于基关节以及膝关节所受力矩,这是由于足端与地面的六个接触点承受了整个机体的重量,髋关节处的力臂相比膝关节的力臂更长,基关节处电机只需承受摩擦力以及带动腿部横向摆动所需的扭矩。
对中足膝关节进行载重比分析,通过仿真模型可以模拟机器人股节长度对机器人载重比的影响。图8为系统载重比曲线。
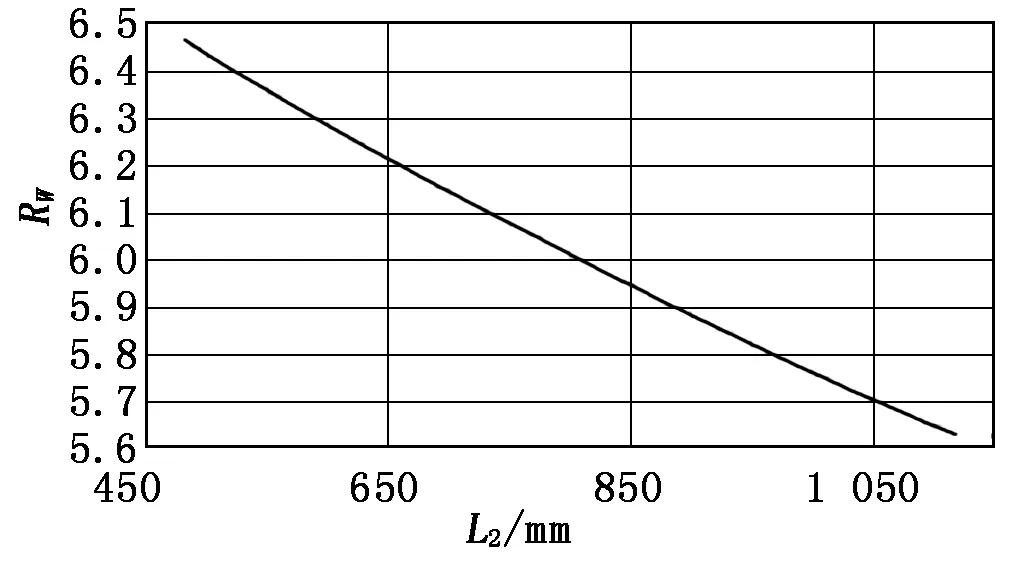
图8 机器人载重比与股节长度关系
从图8中可以看出,为了保证关节转角不变,随着股节的增长,机器人的载重比逐渐下降,因此股节长度越小,机器人载重比越大。
2.5 优化分析
本文设计的六足机器人对机体灵活度、轻动性以及负重能力指标并无特殊要求,认为三个指标重要度相同,取λ1=λ3=1,λ2=-1。当目标函数FB取得最大值时,认为机构取得了最佳的综合性能。此时股节长度为725 mm,胫节长度为975 mm,基节长度取最小值150 mm。由图5对比可知,优化前后能耗相近,但是根据图4可知优化后机体灵活度由0.4提升到了0.425,且从图8可知载重比有所增加。
3 结论
本文主要考虑了腿部各关节长度对机构运动特性的影响,分析了带弹性减振机构的爬行机器人腿部各段长度优化方案。通过仿真结果证明了腿部减振机构对机器人轻动性参数选取存在影响,提出了结合灵活度、轻动性以及载重比指标的腿部结构优化方案,优化方案提升了六足机器人的综合性能。
参考文献:
[1] 黄再辉,张文志.六足机器人的运动仿真研究[J].机械工程与自动化,2015(3):33-34.
[2] Wang S.Gait planning and simulation of the quadruped robot based on virtual prototype[C]//Modeling, Identification&Control(ICMIC), 2012 Proceedings of International Conference on.[s.l.]:IEEE,2012:316-321.
[3] 魏创峰,舒迎将.侧向冲击作用下四足机器人运动仿真分析[J].机械工程与自动化,2016(6):53-54.
[4] 刘海清.六足仿生机器人结构优化设计及其位姿控制策略研究[D].哈尔滨:哈尔滨工业大学,2012:76-81.
[5] 陈诚.基于能耗优化的六足机器人摆动腿轨迹规划[J].计算机仿真,2015,32(1):438-441.
[6] 柳天虹,姜树海.仿生六足机器人稳定性分析与仿真[J].计算机仿真,2013,30(12):360-364.
[7] 罗洋,李奇敏,温皓宇.一种新型轮腿式机器人设计与分析[J].中国机械工程,2013,24(22):3018-3023.
[8] 韩宝玲,王秋丽,罗庆生.六足仿生步行机器人足端工作空间和灵活度研究[J].机械设计与研究,2006,22(4):10-12.
[9] 王刚,张立勋,王立权.八足仿蟹机器人步态规划方法[J].哈尔滨工程大学学报,2011,32(4):486-491.
[10] 王志雄.带视觉和听觉的仿生六足机器人结构优化与控制研究[D].哈尔滨:哈尔滨工业大学,2015:12-21.
猜你喜欢
青岛大学学报(自然科学版)(2022年3期)2022-09-05
现代机械(2022年3期)2022-07-11
昆钢科技(2022年2期)2022-07-08
玩具世界(2022年2期)2022-06-15
当代水产(2021年10期)2022-01-12
计算机测量与控制(2021年11期)2021-12-01
建材发展导向(2021年23期)2021-03-08
装甲兵工程学院学报(2019年1期)2019-05-23
华人时刊(2018年15期)2018-11-10
恋爱婚姻家庭(2015年27期)2015-12-19
