
基于Matlab的直流电机型位置随动系统分析*
2018-05-31 03:58:04范子荣
电气传动自动化 2018年1期
范子荣
(山西大同大学机电工程学院,山西大同037003)
1 引言
21世纪是一个创新的时代,创新是发展的源泉,这就要求在读学生不仅要把基本功打扎实,还要具有一定的创新能力。自动控制理论在工业、航空航天、生命科学等领域得到了广泛的应用。《自动控制原理》是电气信息类专业的专业基础课,其概念抽象,要求学生具有良好的数理基础,实践性要求较高。针对这种现状,前人已提出了对《自动控制原理》这一课程进行教学改革,并取得了一定成就[1-5]。但是,过去的改革大多只讲理论,不谈实践,很难满足时代的要求。
本文提出了对《自动控制原理》的教学内容进行改革,在讲解了《自动控制原理》的第一章控制系统的数学模型、第二章线性系统的时域分析法、第三章线性系统的根轨迹法、第四章频域分析法、第五章校正方法之后,给学生增加讲解一个实际的控制系统——直流电机型位置随动系统。介绍了该系统的组成和结构,建立了该系统的数学模型,运用Matlab对该系统进行时域分析,画出了系统的阶跃响应曲线和Bode图,从而判断出系统是不稳定的;然后运用校正的方法对系统进行校正,通过对校正系统进行分析,画出校正后系统的单位阶跃响应曲线和Bode图,发现系统变为稳定的系统。通过将所学知识应用到直流电机型位置随动系统,可以使学生加深对所学知识的理解,满足应用性大学和用人单位对学生的基本要求,也达到了对《自动控制原理》教学内容的改革要求。
2 直流电机型位置随动系统的数学模型
直流电机型位置随动系统主要由控制器、功率放大器、直流电机、执行机构以及测量元件组成,其中功率放大器包括电压比较放大器和可逆功率放大器。其结构如图1所示。

图1 系统组成结构框图
图1中,θi是位置随动系统的角位置指令,θ表示随动系统的实际控制输出,u表示随动系统的控制输入。功率放大器可以对电压信号进行放大,也可以对可逆变化功率进行放大,其传递函数可以用一阶系统表示为:

直流电机的传递函数为:

其中,TM>0,Td>0,K2>0。位置随动系统的旋转角速度为 ω(s)。
对于实际的控制系统,由于Td≪TM,故式(2)可表示为:

控制器采用PI调节器,其传递函数为:

此外,直流电机从角速度到角位移之间的传递函数是一个积分环节,即:

同时,位置随动系统的测量元件传递函数近似为1。
综上所述,位置随动系统的传递函数结构图如图2所示。
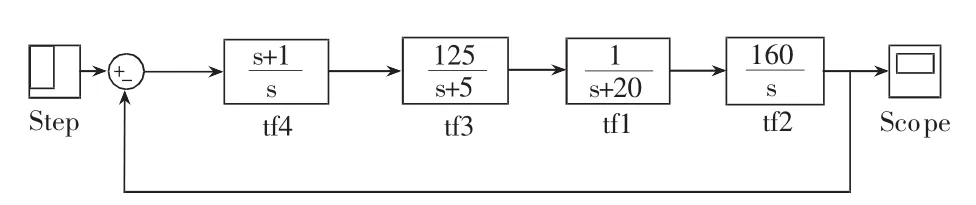
图2 位置随动系统的传递函数结构图
从图2可以看出,位置随动系统的开环传递函数为:

3 直流电机型位置随动系统的稳定性
在Matlab的命令窗口输入以下指令:

可得系统的单位阶跃响应曲线如图3所示。从图3可以看出系统不稳定。

图3 未校正系统的单位阶跃响应曲线
在Matlab中输入margin(G0)可得系统的Bode图如图4所示。

图4 未校正系统的Bode图
由图4可见,系统的幅值裕度为-35.6dB,相角裕度为-58.7deg,可见系统不稳定。
4 系统校正装置的设计
假设校正装置的传递函数为:

由于期望特性的剪切频率为 ωc=3.5rad/s,根据对数幅频特性的定义和对数坐标定义,则期望特性在 ω2=0.7rad /s时的增益为:

未校正系统在ω2=0.7rad/s时的增益为:

其中,160是未校正系统低频延长线与横轴的交点。用式(8)-式(7)可得:

可得 a=45.2,T1=0.011,T2=65,b=0.022,所以:

综上所述,校正后系统的传递函数为:

在Matlab的命令窗口输入以下指令:


通过指令 step(sys)可得校正后系统的单位阶跃响应如图5所示,由图可见校正后系统在t=3s后的单位阶跃响应曲线趋于稳定。通过指令margin(sys)可得校正后系统的Bode图如图6所示,可见校正后系统具有正的相角裕度和正的幅值裕度,所以校正后系统是稳定的。

图5 校正后系统的单位响应曲线

图6 校正后系统的Bode图
5 结束语
本文针对《自动控制原理》的传统授课方式理论性强、实践性弱的特点,提出了对其内容进行改革的观点。将单位阶跃响应分析和Bode图分析应用到直流电机型位置随动系统,对其稳定性进行了分析,并运用串联超前滞后校正装置对系统进行校正,校正后的系统具有良好的稳态性能和动态性能,不但提高了上课的教学质量,而且提高了大学生的实践和创新能力,满足了新形势下人才培养方案和时代发展的需要。虽然以上对本课程内容的教学改革已取得了一定的成绩,但还需要在教学实践中不断学习和探索,以便取得更大的成绩。
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
装备制造技术(2021年4期)2021-08-05 07:39:12
测控技术(2018年7期)2018-12-09 08:58:46
天津教育·下(2018年9期)2018-07-13 08:25:47
电子测试(2018年6期)2018-05-09 07:31:47
光学精密工程(2016年4期)2016-11-07 09:05:39
铁道通信信号(2016年12期)2016-06-01 12:11:58
海峡科技与产业(2016年3期)2016-05-17 04:32:11
电测与仪表(2014年11期)2014-04-04 09:21:20
电力自动化设备(2013年11期)2013-09-18 02:55:14
