
番茄链式纸钵苗移栽机分离机构设计与优化试验
2018-05-31 03:16:00陈海涛
农业机械学报 2018年5期
韩 霞 陈海涛
(1.东北农业大学工程学院, 哈尔滨 150030; 2.黑龙江八一农垦大学工程学院, 大庆 163319)
0 引言
番茄钵苗机械化移栽是获得番茄高产的有效途径之一。纸钵育苗移栽机械化作业由取苗器完成钵苗分离,并将钵苗送入栽植器,由栽植器将钵苗植入田中,完成钵苗移栽[1-3]。其中纸钵苗分离机构是番茄钵苗机械化移栽技术的核心工作部件,可实现番茄纸钵苗的有序分离,其性能的优劣直接决定了番茄钵苗机械化移栽的质量和效率。
近年来,国内研究者引进国外技术,结合国内工艺,进一步开发出一系列功能可靠的半自动化机械。其中,胡子武[4]结合三七种苗物理特性,提出了钉齿式螺旋式种苗分离方法,并对该分离机构进行仿真及试验优化,但未将送苗机构与定向栽植机构进行匹配。那明君等[5]针对玉米纸筒钵苗移栽机输送分苗机构,采用二次正交旋转中心组合优化方法对其工作参数进行优化试验,为钵苗自动喂入提供依据。廖庆喜等[6]设计了一种油菜纸钵苗移栽机嵌入式气动取苗机构,解决了传统移栽机机械式取苗结构复杂问题,但该机构为间歇性取苗,制约移栽机工作效率进一步提升。宋玉洁等[7]设计了一种以锯齿刃圆盘切割刀为主体的分苗机构,为玉米大田移栽提供技术支持,但在作业过程中要求输送机构与分离机构高度配合,否则导致钵苗被刀刃破坏。赖庆辉[8]、赵作伟等[9-10]设计了一种甜菜链式纸钵苗分离机构,并对其结构和工作参数进行优化,但该研究只适用于甜菜小钵苗移栽,对于其他作物尚需进一步研究。
本研究针对番茄钵苗机械化移栽过程中纸钵苗破损率较高等问题,以番茄链式纸钵苗高速、有序、高效分离为目标,设计一种分离辊角度可调差速式番茄链式纸钵苗移栽试验台,试验分析主要因素对钵苗分离率、纸钵破损率影响规律,优化满足番茄链式纸钵苗分离率及纸钵破损率要求的参数组合,以期为设计高效番茄链式纸钵苗移栽机奠定基础。
1 链式纸钵苗移栽分离机构设计
1.1 结构和工作原理
番茄链式纸钵苗移栽试验台主要由钵苗盘、引出机构、分离机构、栽植机构等组成,如图1所示。
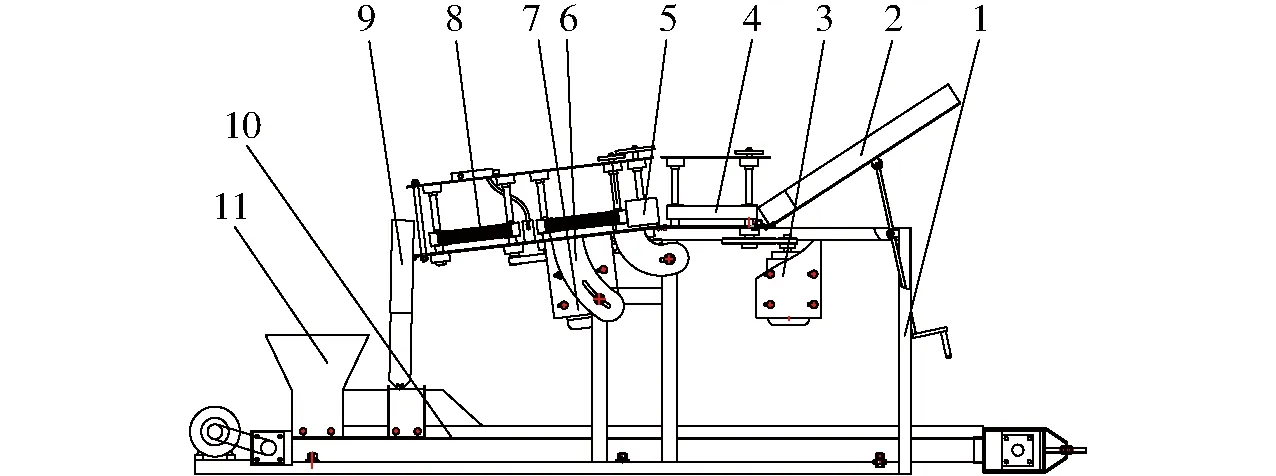
图1 链式纸钵苗移栽试验台结构示意图Fig.1 Sketch of chain paper pot seedling transplant1.试验台架 2.钵苗盘 3.引出机构驱动电动机 4.引出机构 5.分离机构 6.角度调节机构 7.分离机构驱动电动机 8.输送机构 9.落苗管 10.移栽机构 11.注土口
链式纸钵苗以“之”字形摆放于苗盘上,引出机构由驱动电动机作为动力输出,利用引出机构与纸钵苗间摩擦力将纸钵苗从秧盘中拉出,输送至分离机构,设定分离辊筒圆周线速度大于链钵苗的引出速度,使链钵苗在两部分差速产生的拉力作用下撕裂拉断纸钵苗连接部,实现钵苗分离,分离后钵苗由输送机构传递至落苗管,落入移栽机构完成移栽。
1.2 链式纸钵苗特性
链式纸钵苗带如图2所示。链式纸钵苗输送过程中应保证连接部7和链钵挂接部4、8不断裂,在分离过程中应保证连接部7顺利断开,整个运输过程中纸钵苗筒变形不致损伤钵苗。
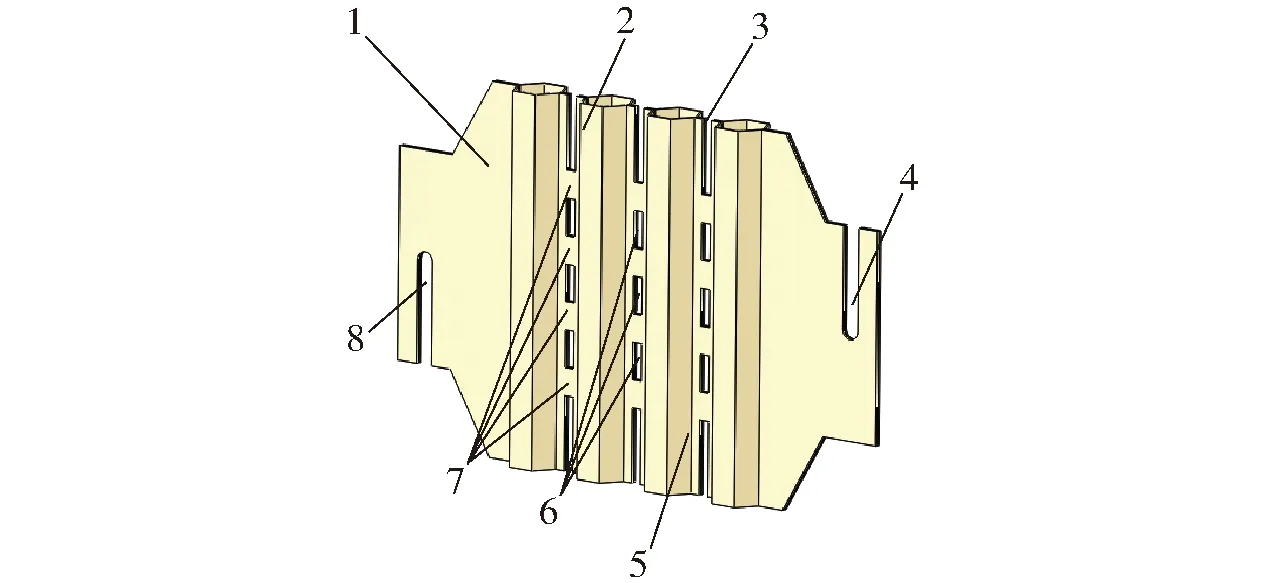
图2 链式纸钵苗带结构图Fig.2 Structure diagram of chain paper pot belt1.纸带 2.纸钵苗筒 3.非水溶性胶条(结合部) 4.链钵始端挂接部 5.分离导引部 6.分离部 7.连接部 8.链钵末端挂接部
为使链式纸钵制作工艺简单可靠,且在作业过程中便于链钵苗从苗盘分离引出,需对链式纸钵苗带进行结构合理设计,根据番茄苗根系直径,选取正六边形纸钵外接圆半径25 mm,结合部长度25 mm,如图3和图4所示。
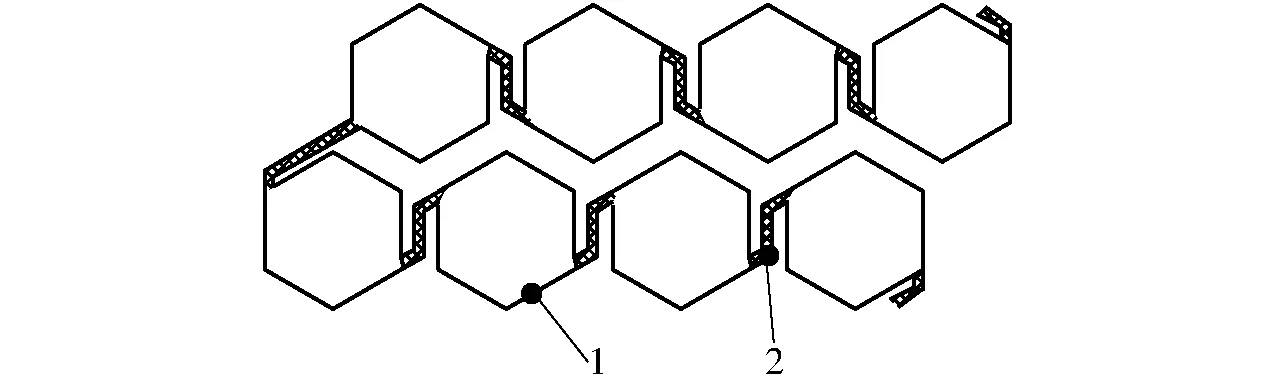
图3 链式纸钵排列方案Fig.3 Structure diagram of chain paper pot arrangement plans1.纸钵 2.连接部

图4 纸钵外形尺寸Fig.4 Size of paper pot
1.3 关键部件设计
分离机构是整个移栽系统核心部分,性能可靠的分离机构是提升移栽效率、降低钵苗损伤的关键,因此需对分离机构相关部件进行分析。
1.3.1引出机构设计
引出机构位于分离机构喂入端,是分离机构稳定高效作业的前提。首先以引出机构为研究对象,分析其对纸钵苗作业过程,如图5所示。当纸钵苗将进入引出机构时,电动机驱动引出机构主动辊筒转动,在摩擦力作用下将纸钵苗从苗盘输送至分离机构。如引出辊筒间距及辊筒半径过小,易导致纸钵苗在入口处堆积,影响整个移栽机构作业效率。

图5 引出状态下钵苗受力分析Fig.5 Force analysis of pot seedlings under condition of being pulled
为保证纸钵苗顺利进入引出机构,使辊筒对纸钵苗合外力指向运动方向,应有
2f1cosα-2Nsinα-f2>0
(1)
其中
f1=μ1N
(2)
式中f1——引出辊筒与纸钵苗间摩擦力,N
α——分离轮对纸钵苗正压力与水平方向夹角,(°)
N——分离轮对纸钵苗正压力,N
f2——纸钵苗与纸钵苗、纸钵苗与苗盘间摩擦力之和,N
μ1——橡胶材料与纸钵苗滑动摩擦因数
纸钵苗与纸钵苗、纸钵苗与苗盘之间摩擦力之和f2,可通过调节苗盘角度使其控制在一定范围内,因此忽略其影响,进一步整理得
μ1>tanα
(3)
由前期理论分析及预试验,选择橡胶作为引出机构主要材料,测得其与纸钵苗表面滑动摩擦因数为0.78,通过式(3)计算得到引出机构主动轮对纸钵苗的正压力与水平方向夹角α最大为38.0°。
引出机构主动轴半径与轴间距关系如图6所示,保证α不超过38.0°,半径与轴距间关系式为
(4)
式中d——引出机构主动轴轴间距,mm
r——引出机构主动轴半径,mm
a——纸钵外接圆半径,mm

图6 主动轴半径与轴间距关系示意图Fig.6 Relationship diagram between shaft radius and spacing
在实际操作过程中,引出机构主动轴半径越大,施加在纸钵苗上单位面积力越小,因此在尺寸允许情况下可适当放大轮直径,选取主动轮半径为30 mm,轴间距80 mm,此时主动轮对纸钵苗的正压力与水平方向夹角的最大值为25.8°,满足设计要求。
1.3.2分离机构设计
纸钵苗的分离主要靠其与分离辊筒间摩擦力的作用来实现,因此需在分离辊筒与纸钵苗间施加一定预紧力。预紧力过大会使纸钵破损率增加,为使该预紧力适中,应将辊筒倾斜放置,使纸钵苗下端最先受到辊筒与其相对运动产生的摩擦力作用,如图7所示。当摩擦力作用超过纸钵苗下端连接部强度,连接部被逐一撕裂,作用部位逐渐上升。
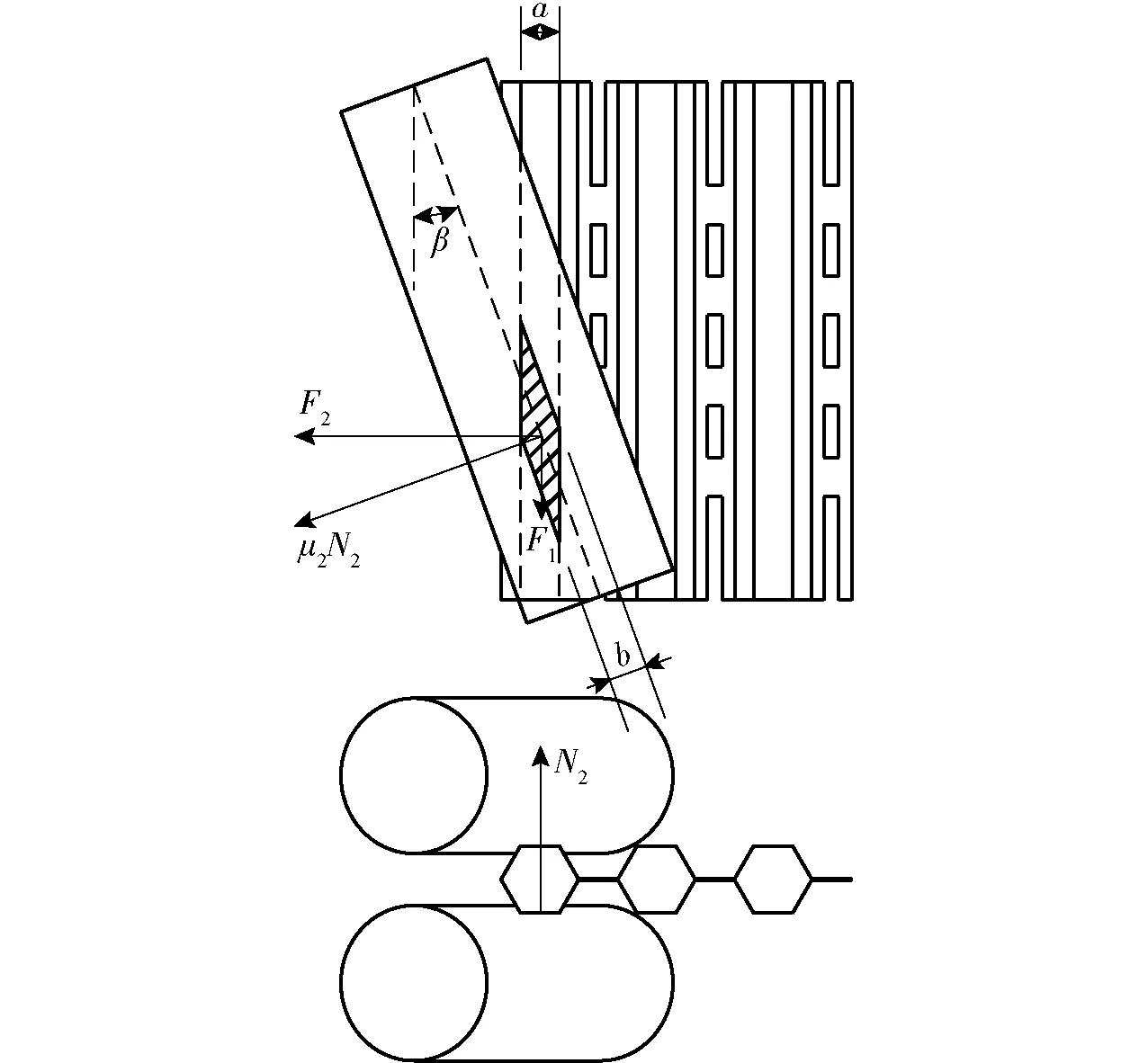
图7 分离状态下纸钵苗受力分析Fig.7 Force analysis of pot seedlings under condition of being separated
考虑分离辊筒受压产生的变形,其与纸钵苗作用面积为
(5)
(6)
式中S——分离辊筒与纸钵苗作用面面积,mm2
b——由辊筒变形产生的截面弦长,mm
β——分离辊筒轴线与重力方向偏转角,(°)
R——分离辊筒半径,mm
D——分离辊筒轴间距,mm
辊筒与纸钵苗作用发生挤压变形,如图8所示,此时辊筒对纸钵苗的正压力为
(7)
辊筒对纸钵苗的撕扯力为
F1=2μ2N2cosβ
(8)
式中F1——分离机构对纸钵苗撕扯力,N
μ2——海绵材料与纸钵苗的滑动摩擦因数
N2——分离辊筒对纸钵苗正压力,N
E——海绵弹性模量,MPa
θmax——辊筒对钵体压力分布中心与边缘夹角

图8 辊筒受力变形分析Fig.8 Deformation analysis of roller
前期试验得链式纸钵苗平均分离力为6.7 N,每两个纸钵苗之间有4个连接部,计算得每个连接部分离力为1.68 N,为确保每个连接部有效分离,分离机构对纸钵苗的撕扯力F1最小为2 N。结合式(7)和式(8)计算得出分离辊筒轴线与重力方向偏转角β取值范围在10°~23°。
2 试验材料与方法
2.1 试验材料与设备
试验材料:番茄链式纸钵苗在黑龙江八一农垦大学绿化中心基地培育,每册72株,纸钵内土壤平均含水率为31.7%,平均单钵苗质量为77.4 g。
试验仪器与设备:游标卡尺;土壤温湿度测量仪,北京恒奥德仪器仪表有限公司,测量含水率范围:0~100%;电子秤,桦利泰电子衡器有限公司,量程0~300 kg;非接触式转速计,优利德电子有限公司,量程0~9 999 r/min;秒表精度为0.01 s。番茄链式纸钵苗移栽试验台如图9所示。
图9 番茄链式纸钵苗移栽试验台Fig.9 Test-bed of tomato chain paper pot seeding transplant1.电控系统 2.引出机构 3.分离机构 4.栽植机构
2.2 试验设计与方法
影响移栽过程中钵苗分离率、纸钵破损率的主要因素为引出速度、分离轮与引出轮速比、分离轮倾角。运用三因素五水平二次正交旋转中心组合试验方法,选取引出速度x1、分离轮与引出轮速比x2、分离轮倾角x3为试验因素,以钵苗分离率、纸钵破损率为评价指标实施试验,通过理论分析并结合前期预试验确定各因素水平范围。试验因素编码如表1所示,每组试验重复10次,取其平均值作为试验结果。

表1 试验因素编码Tab.1 Experiment factors coding
番茄链式纸钵苗高速、有序、高质分离性能通过钵苗分离率、纸钵破损率来评价。钵苗分离率y1i是指第i组被完全分离成单个钵苗数占该组钵苗样本数的百分比。分离率越大则表示番茄链式纸钵苗移栽分离机构工作效率越高。纸钵破损率y2i是指第i组试验纸钵破损数占该组钵苗样本数的百分比,用来评价分离机构对钵苗的破坏程度。
(9)
(10)
式中ai1——第i组试验被分离开的纸钵苗数,个
bi1——第i组试验所用纸钵苗总数,个
ai2——第i组试验纸钵破损数,个
2.3 数据处理
采用Design-Expert 6.0软件对试验数据进行处理和统计分析。
3 试验结果与分析
3.1 试验结果
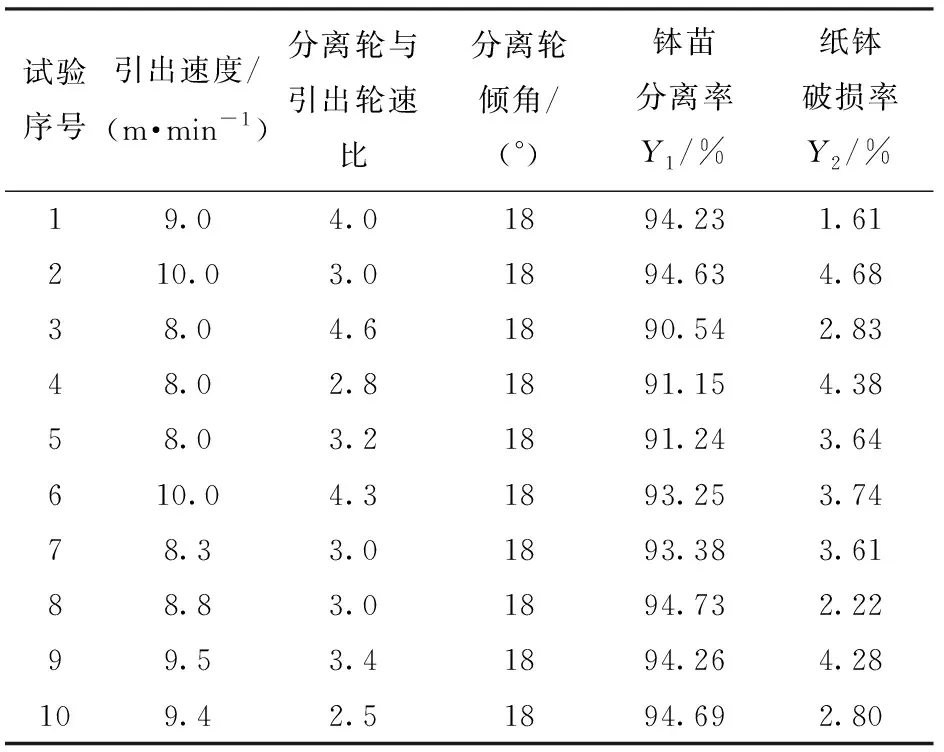
试验结果如表2所示,X1、X2、X3为因素编码值。
3.2 回归模型建立与显著性分析
对钵苗分离率试验结果进行方差分析,如表3所示,在信度α为0.05的条件下,钵苗分离率的二次回归模型极显著(P<0.01),回归模型失拟项不显著(P=0.246 8),回归方程的决定系数R2为0.969 8,说明回归方程的预测值与实际值拟合良好。所得回归方程为

(11)
对纸钵破损率试验结果进行方差分析,在信度α为0.05的前提下,纸钵破损率二次回归模型极显著(P<0.01),回归模型失拟项不显著(P=0.088 2),回归方程的决定系数R2为0.973 2,说明回归方程的预测值与实际值拟合良好。所得回归方程为

(12)

表2 试验结果Tab.2 Test results

表3 方差分析Tab.3 Variance analysis
注:P<0.01为极显著,0.01 3.3.1各因素对性能指标影响分析 参考多元二次回归中各因素对指标影响计算方法[9],判定各试验因素对各项指标的影响程度,结果如表4所示。 表4 各因素对性能指标的因素贡献率Tab.4 Contribution ratio of each factor toperformance index 3.3.2各因素对性能指标交互作用影响分析 结合方差分析结果(表3),研究各因素对性能指标交互作用影响规律,可知引出速度和分离轮与引出轮速比对钵苗分离率影响显著(P<0.05),如图10a所示,当分离轮与引出轮速比一定,钵苗分离率随着引出速度的增加呈先增大后减小趋势;当引出速度较小时,钵苗分离率随着分离轮与引出轮速比呈先增大后减小趋势,但分离效果较差,分离率小于85%。当引出速度处于中间水平范围内,分离轮与引出轮速比较小时,此时钵苗分离率较优;当引出速度较大时,钵苗分离率随着分离轮与引出轮速比呈先增大后减小趋势,但分离效果随之下降。由上述规律分析可知,当引出速度较小时,引出系统中番茄钵苗随输送带运动较慢,上一钵苗完成分离动作后,下一钵苗还未输送至分离机构,不能满足钵苗的连续供应。当引出速度过高时,钵苗随输送带运动过快,使得钵苗在分离机构处发生堆积,致使分离效果不稳定。引出速度与分离轮倾角的交互作用对钵苗分离率影响显著(P<0.05)。如图10b所示,当引出速度一定,钵苗分离率随着分离轮倾角呈先增大后减小趋势;当分离轮倾角一定,钵苗分离率随着引出速度呈先增大后减小趋势。引出速度与分离轮倾角的交互作用对纸钵破损率影响极显著(P<0.01)。如图10c所示,当引出速度一定,纸钵破损率随着分离轮倾角呈先减小后增大趋势;当分离轮倾角一定,纸钵破损率随着引出速度呈先减小后增大趋势。进一步分析可知,为得到较优分离效果,同时保证较低纸钵破损率,需在分离辊筒与纸钵苗之间施加一定预紧力,为减小该预紧力对纸钵造成的破坏,应适当增大分离轮倾角,使得纸钵苗下端最先受到辊筒与其相对运动产生的摩擦力作用,超过纸钵苗下端连接部强度,造成连接部断裂,但当分离轮倾角较大时,则会造成纸钵苗与分离辊接触面积减小,纸钵苗受力不均,使得钵体破损率上升。 图10 各试验因素交互作用对性能指标影响的响应面Fig.10 Response surfaces exhibiting effects of test factors on performance indexes 根据番茄链式纸钵苗移栽作业要求,以钵苗分离率最大、纸钵破损率最小为优化目标,在引出速度6.75~11.25 m/min,分离轮与引出轮速比2.5~5.5,分离轮倾角13°~21°约束条件下进行优化,结果如图11所示。在分离轮倾角为18°时,引出速度为8~10 m/min,分离轮与引出轮速比为2.5~4.6的参数组合条件下可满足优化要求。 图11 工艺参数优化结果Fig.11 Optimum result of technology parameters 根据优化结果对其进一步进行台架试验验证,结果如表5所示,所得钵苗分离率均在90%以上、纸钵破损率均小于5%,试验结果满足番茄链式纸钵苗移栽作业要求。 表5 验证试验结果Tab.5 Verification result (1)设计优化了一种分离辊角度可调差速式番茄链式纸钵苗移栽试验台,能够实现番茄链式纸钵苗高速、有序、高效分离。 (2)所设计的一种分离辊角度可调式番茄链式纸钵苗分离机构,各因素对钵苗分离率的影响由大到小依次为分离轮倾角、引出速度和分离轮与引出轮速比;对纸钵破损率的影响由大到小依次为分离轮与引出轮速比、引出速度和分离轮倾角。 (3)在分离轮倾角为18°,引出速度为8~10 m/min,分离轮与引出轮速比为2.5~4.6的参数组合条件下,分离辊角度可调式番茄链式纸钵苗分离机构可以实现钵苗分离率大于90%、纸钵破损率小于5%的设计要求。 1 董锋,耿端阳,汪遵元.带式喂入钵苗栽植机研究[J].农业机械学报,2000, 31(2):42-45. DONG Feng, GENG Duanyang, WANG Zunyuan. Study on block seedling transplanter with belt feeding mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery,2000,31(2):42-45.(in Chinese) 2 杨传华,方宪法,杨学军,等.基于PLC的蔬菜钵苗移栽机自动输送装置[J/OL].农业机械学报,2013,44(增刊1):19-23. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2013s104&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2013.S1.004. YANG Chuanhua, FANG Xianfa, YANG Xuejun, et al. Automatic delivery mechanism of potted-seedling for vegetable transplanter based on PLC[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013,44(Supp.1):19-23.(in Chinese) 3 梁喜凤, 蔡阳阳, 王永维. 番茄钵苗自动移栽钵体物理机械特性试验[J]. 浙江大学学报, 2015, 41(5):616-622. LIANG Xifeng, CAI Yangyang, WANG Yongwei. Experiment on physical and mechanical properties of tomato seedling pot for automatic vegetable transplanter[J]. Journal of Zhejiang University,2015, 41(5):616-622.(in Chinese) 4 胡子武. 三七移栽机分离装置设计与试验研究[D].昆明:昆明理工大学,2017. HU Ziwu. Design and experimental study on the separating device of panax notoginseng transplanter[D]. Kunming : Kunming University of Science and Technology,2017.(in Chinese) 5 那明君,颜世东,杨波,等.玉米纸筒钵苗移栽机输送分苗装置性能研究[J].东北农业大学学报,2016,47(10):51-57. NA Mingjun, YAN Shidong, YANG Bo, et al. Study on conveying and separating seedling device of corn paper pot seedling transplanter[J]. Journal of Northeast Agricultural University,2016,47(10):51-57.(in Chinese) 6 廖庆喜,张照,胡乔磊,等.油菜纸钵苗移栽机气动取苗机构设计与轨迹分析[J/OL].农业机械学报,2017,48(11):70-78. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20171109&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2017.11.009. LIAO Qingxi, ZHANG Zhao, HU Qiaolei, et al. Design and trajectory analysis of pneumatic picking-up mechanism for rape paper pot seedling[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2017,48(11):70-78.(in Chinese) 7 宋玉洁,胡军.玉米移栽机分苗机构的结构设计与参数分析[J].农机化研究,2017,39(7):93-97. SONG Yujie, HU Jun. The structure design and parameter analysis for the corn seedling mechanism of transplanting machine[J]. Journal of Agricultural Mechanization Research, 2017,39(7):93-97.(in Chinese) 8 赖庆辉. 链式纸钵育苗甜菜自动高速移栽机关键技术研究[D].长春:吉林大学,2011. LAI Qinghui. Research of key technologies on automatic high-speed chain paper pot seedling transplanter for sugar beet[D]. Changchun: Jilin University,2011.(in Chinese) 9 赵作伟,陈海涛,赖庆辉,等.甜菜链式纸钵苗分离装置参数优化[J].农业工程学报,2010,26(9):154-158. ZHAO Zuowei, CHEN Haitao, LAI Qinghui, et al. Chain separator parameter optimization for the pot seedling of sugar beet[J]. Transactions of the CSAE,2010,26(9):154-158.(in Chinese) 10 赵作伟,陈海涛,赖庆辉,等.甜菜链式纸钵苗分离装置的设计[J].农机化研究,2009,31(12):80-82. ZHAO Zuowei, CHEN Haitao, LAI Qinghui, et al. Design of separating device for the chain pot seedling of sugar beet[J]. Journal of Agricultural Mechanization Research,2009,31(12):80-82.(in Chinese) 11 方萍. 实用农业试验设计与统计分析指南[M]. 北京:中国农业出版社, 2000. 12 金鑫,李树君,杨学军,等.膜上移栽钵苗栽植机构运动分析与参数优化[J/OL].农业机械学报,2012,43(增刊):29-34. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2012s06&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2012.S0.006. JIN Xin, LI Shujun, YANG Xuejun, et al. Motion analysis and parameter optimization for pot seedling planting mechanism based on up-film transplanting[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2012,43(Supp.):29-34.(in Chinese) 13 韩长杰,张学军,杨宛章,等.旱地钵苗自动移栽技术现状与分析[J].农机化研究,2011,33(11):238-240. HAN Changjie, ZHANG Xuejun, YANG Wanzhang, et al. Present status and analysis of dry-land auto-transplanting seedling technique[J]. Journal of Agricultural Mechanization Research, 2011,33(11):238-240.(in Chinese) 14 崔巍,颜华,高希文,等.旱地移栽机械发展现状与趋势[J].农业工程,2015,5(2):15-18. CUI Wei, YAN Hua, GAO Xiwen, et al. Development status and trend of dry land transplanting machine[J]. Agricultural Engineering,2015,5(2):15-18.(in Chinese) 15 HARRISON R, HARRISON D, ZUHOSKI P B. Computer operated automatic seedling plant transplanting machine: US 4947579 A[P]. 1990- 08- 14. 16 WALTER L M, JR JAMES W G, FRANK H P. A mechanically fed containerized seedling transplanter[J]. Transactions of the ASAE, 1977,20(1):38-41. 17 CHOI W C, KIM D C, RYU I H, et al. Development of a seeding pick-up device for vegetable transplanters[J]. Transactions of the ASAE, 2002,45(1):13-19. 18 BREWER H L. Experimental automatic feeder for seedling transplanter[J]. Applied Engineering in Agriculture, 1988,4(1):24-29. 19 汪鹏飞. 旱地钵苗移栽机栽植机构的设计与分析[D].石河子:石河子大学,2017. WANG Pengfei. Design and analysis of transplanting mechanism of dry land seedling transplanter[D]. Shihezi :Shihezi University,2017.(in Chinese) 20 张丽华,邱立春,田素博.穴盘苗自动移栽机的研究进展[J].农业科技与装备,2009(5):28-31. ZHANG Lihua, QIU Lichun, TIAN Subo. Progress in the research of manipulator of transplanting potted tray seedlings[J]. Agricultural Science & Technology and Equipment,2009(5):28-31.(in Chinese) 21 张振国,曹卫彬,王侨,等.穴盘苗自动移栽机的发展现状与展望[J].农机化研究,2013,35(5):237-241. ZHANG Zhenguo, CAO Weibin, WANG Qiao, et al. Development status and prospect of plug seedlings automatic transplanting machine[J]. Journal of Agricultural Mechanization Research,2013,35(5):237-241.(in Chinese) 22 于晓旭,赵匀,陈宝成,等.移栽机械发展现状与展望[J/OL].农业机械学报,2014,45(8):44-53. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140808&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.08.008. YU Xiaoxu, ZHAO Yun, CHEN Baocheng, et al. Current situation and prospect of transplanter[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014,45(8):44-53.(in Chinese)3.3 各因素对指标影响分析
3.4 参数优化与验证试验

4 结论
猜你喜欢
国际纺织导报(2023年5期)2023-03-18 05:03:52
林业科技(2020年3期)2021-01-21 08:28:38
江西农业大学学报(2020年6期)2021-01-08 02:35:38
农机化研究(2019年7期)2019-05-24 09:48:24
橡塑技术与装备(2018年16期)2018-08-27 07:08:28
农业工程学报(2018年9期)2018-06-01 08:46:00
橡胶工业(2018年2期)2018-02-16 15:59:33
汽车工程(2016年11期)2016-04-11 10:57:53
黑龙江工程学院学报(2015年5期)2015-12-04 01:39:45
汽车工程(2014年7期)2014-10-11 07:42:02
