
水稻栽植机械化技术研究进展
2018-05-31 03:35:21李泽华李秀昊陈林涛李宏伟袁志成
农业机械学报 2018年5期
李泽华 马 旭 李秀昊 陈林涛 李宏伟 袁志成
(1.华南农业大学数学与信息学院, 广州 510642; 2.华南农业大学工程学院, 广州 510642)
0 引言
水稻是我国主要粮食作物之一,水稻生产机械化是水稻生产发展的主要方向,提高水稻生产全程机械化水平是保障国家粮食安全、增强农业综合生产能力、增加农业收入和推进农业现代化的重要举措之一[1]。长期以来,水稻种植机械化是我国水稻生产机械化的薄弱环节,也是我国水稻生产全程机械化发展中的瓶颈[2-3]。目前,我国水稻机械化种植方式主要有机栽植和机直播。机栽植包括育秧和移栽2个环节,机移栽包括机插秧、机栽插和机抛秧等。近年来,机抛秧应用较少,机直播因具有现代稻作轻简化特点,是一种省工、省力、节本、节能、节水高效的种植方式[4],在我国发展非常迅速,逐渐成为水稻机械化种植的重要方式之一[5],相关技术研究[6-7]也逐渐深入。但是,直播技术受自然条件、种植制度制约,尤其是容易受积温、土壤平整、种子处理、水层控制、除草技术等因素的影响,国内大部分地区还是选择机栽植方式作为突破水稻种植机械化的发展方向。目前,国内外水稻机械化移栽方式主要有毯状苗机插秧(含钵形毯状苗机插秧)和钵体苗机栽插2种形式。这两种机械化栽植技术的共同特点是都包含育秧技术、移栽技术及两者之间的耦合协调关系。本文主要对水稻栽植机械化技术的研究现状进行阐述。首先对我国水稻种植机械化的发展现状及其特征进行概述,然后围绕毯状苗机插秧和钵体苗机栽插2种移栽方式,重点阐述机械化育秧技术和机械化移栽技术及其装备的研究进展。
1 水稻种植机械化发展现状
1.1 中国水稻机械种植面积及其结构
2004年,《农业机械化促进法》颁布实施,并开始实施农机具购置补贴,这是中国农业机械化发展进程中的一个转折点,也是水稻种植机械化快速发展的转折点。表1给出了2004—2015年全国水稻机械种植面积及其结构(数据来源于历年《全国农业机械化统计年报》)。由表1可知,12年间全国水稻机械种植面积增加了6倍多,增加的面积主要是机插面积,机播面积略有增加,机抛秧的面积大幅下滑;2012年以来机抛秧面积占全国水稻机械种植面积的比例都小于1%,表明机抛秧已不是我国水稻机械化种植的主要方式;2011年以来机插面积占全国水稻机械种植面积的比例都超过90%,2015年达94.54%,表明机插秧方式在全国得到了较成功的推广,其主导地位已明显确立。然而,2015年全国水稻机械种植率仅42.26%,刚刚实现从初级阶段向中级阶段的跨越,表明彻底解决我国水稻种植机械化难题需继续努力。
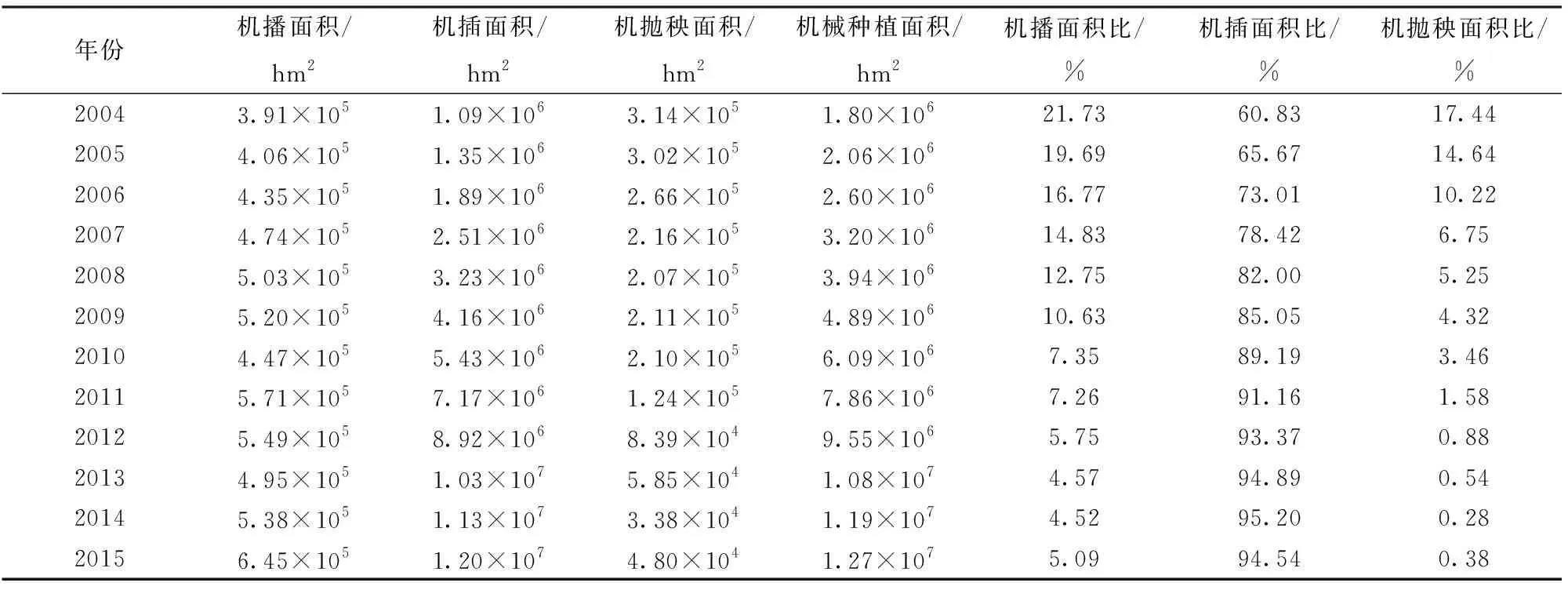
表1 2004—2015年中国水稻机械种植面积及其结构Tab.1 Area of rice planting with machine and its structure from 2004 to 2015 in China
为了说明机插秧技术在全国推广的特点,图1给出了全国10个主要水稻种植省区(标准为2015年水稻种植面积超过百万公顷) 2004—2015年机插秧面积的变化情况,这10个省区2015年的水稻种植面积共2.43×107hm2,占全国水稻种植面积的80.47%,具有较好的代表性。

图1 主要水稻产区机插秧面积变化曲线Fig.1 Area and its changing trend of rice transplanting machine in main provinces of China
由图1可知,2004年,除黑龙江省和江苏省的机插秧有一些基础外,其它8个省区的机插秧面积几乎为零,说明我国水稻机插秧技术快速推广主要在2004年以后。从机插秧面积的绝对数看,黑龙江省发展很快,2009年接近2×106hm2,2015年达到3.82×106hm2;其次是江苏省,2015年的机插面积为1.71×106hm2;除这2个省外,其它8个省区的机插面积都不足1×106hm2;湖北省和安徽省一直保持较平稳的发展态势,湖南省则从2010年开始以高速增长的姿态于2015年跃居全国第3位;广东省、广西壮族自治区、四川省的发展速度相对较慢,云南省的机插秧发展更慢。从机插面积的相对数看,2015年,黑龙江省和江苏省的机插率分别达到99.38%和74.84%,其它8个省区的机插率都不足40%,尤其是云南省的机插率仅3.08%。由此可见,整体上中国水稻机插秧技术推广取得了较好的成效,正以较快的速度由黑龙江省和江苏省向全国推广,但各省区发展不平衡,整体水平仍然较低。
1.2 水稻毯状苗机插秧技术推广的影响因素
水稻毯状苗机插秧技术推广的影响因素备受关注。研究表明[8-17],影响水稻毯状苗机插秧技术推广的因素主要有社会因素和技术因素。社会因素主要是指影响水稻机插秧技术推广的基础条件,包括自然地理环境、耕作制度、土地经营形式、农田基础设施、农民经济状况和文化水平等。技术因素是指机插秧技术本身,包括技术上的先进性、适应性、可靠性和经济性等。
从社会因素方面看,陈聪等[8]应用面板数据模型分析得到水稻户均种植规模是制约水稻机插秧发展最主要的因素;李泽华等[9]基于灰色关联分析得到影响中国水稻种植机械化地区发展不平衡的前5个因素依次为:农田基础设施建设水平、土地经营规模、育秧机械化水平、农机化培训和机械作业需求水平。其他的一些观点认为,因为农民追求水稻生产轻简化,在直播和机插秧之间更倾向于选择直播方式[10],从而部分地限制了水稻机插秧技术的推广应用;推广的运行机制不健全也是水稻机插秧推广缓慢的原因之一[11];插秧机机具价格贵、利用率低,故障多而维修困难[12-13];经营者总体年龄偏大,文化水平不高,新技术接受掌握难度大,耕作观念与思想转变顾忌多[14-15],等等,都在一定程度上影响水稻机插秧技术的推广。
从技术因素看,现有的育秧技术和插秧技术本身的特性是影响水稻机插秧推广的重要因素,也是最关键的因素。目前,我国水稻机插秧技术发展的难点是杂交稻和晚稻机插秧[16]。原因是现有的毯状苗机插秧技术是以日本的常规粳稻种植为基础发展起来的,对我国的常规稻基本适应,但对杂交稻、双季晚稻和连作晚稻的种植还存在较多问题,主要表现为育秧取土困难[10,13]、播种量大[13,16]、播种均匀性欠佳[17]、秧龄弹性小[16]、秧苗素质差[10-19]、苗床管理粗放[13]、机插效果差(均匀合格度偏低、漏秧率偏高、伤秧较重)[10-16]等。
总之,无论是社会因素还是技术因素,我国水稻毯状苗机插秧技术的发展仍面临较多困难,不同地方的问题也不尽相同,需要各地区根据自身的特点系统分析,谋求整体突破。
1.3 水稻钵体苗机栽插技术推广的影响因素
钵体苗机栽插主要特点:有利于培育长秧龄壮秧,秧苗素质好,秧龄弹性大,移栽时不伤根、植伤轻、返青活棵快、分蘖早;有利于利用优势分蘖争取高产适宜穗数,培育适宜数量的壮秆大穗,增产显著、生产适应性强[18]。因此,国内外对钵体苗机栽插技术进行了大量探索[19-21]。但是,该技术的推广较慢,主要原因为:钵体苗栽插机价格高,特别是秧盘价格高,投入成本高,机械作业效率较低、部分产品可靠性差,且此种方式下水稻稳定高产或超高产的规律与关键农艺尚不清晰。然而,钵体苗机栽插育秧不需要秧苗成毯,在杂交稻和超级杂交稻育秧中能有效化解播种密度与成毯性之间的矛盾,有望解决杂交稻机移栽难题。因此,钵体苗机栽插技术将进一步得到更多的关注,是农机农艺深度融合的重点。
2 水稻机械化育秧技术与装备研究进展
育秧是水稻栽植机械化的前提,其中播种是关键,国内外现有的机械化育秧方式都是采用秧盘育秧,下面主要对秧盘育秧方式及其机械播种技术与装备进行阐述。
2.1 水稻秧盘育秧方式现状
根据秧盘的材质不同,可分为塑料软盘育秧、硬盘育秧和植质育秧;根据秧苗的根系分布不同,可分为毯状苗育秧、钵形毯状苗育秧和钵体苗育秧;根据育秧用水方式不同,可分为旱育秧、水育秧和湿润育秧;根据育秧场地不同,可分为工厂化育秧和田间育秧;根据育秧基质和需要的特殊材质,包括泥浆育秧、多层薄膜育秧、无纺布育秧、麻膜育秧等多种形式。
图2给出了常见的7种机插育秧秧盘,包括毯状软秧盘、硬秧盘,钵体软秧盘、硬秧盘,钵形毯状软秧盘、硬秧盘和植质秧盘等。为适应标准化作业,毯状秧盘的规格通常是一致的,如软、硬秧盘的内部尺寸为580 mm×280 mm×25 mm,钵体盘根据不同的机型,尺寸与穴数差异较大,有406(29×14)穴、375(25×15)穴和448(32×14)穴等。这些秧盘育成的秧苗有3种类型,即毯状苗、钵形毯状苗和钵体苗(图3)。

图2 机插育秧盘Fig.2 Seedling tray for rice transplanting with machine

图3 机插秧苗Fig.3 Rice seeding for transplanting with machine
在毯状苗和钵形毯状苗机插秧育秧技术中,播种量是关键。对常规稻,要求栽插3~6株/穴,播种量一般要求干种达到100 g/盘以上,芽种120~160 g/盘[22-23],此时播种密度大,秧块盘根性好,机械栽插质量能达到农艺要求,现有育秧技术能较好地适应生产需要。若是杂交稻,农艺上要求栽插1~3株/穴,理论上播种量为芽种40~45 g/盘,现有的育秧技术还不能很好地适应这一要求,表现为秧块盘根性较差,机插时漏插率较高。试验表明,现有技术下杂交稻实际播种量需要芽种70~100 g/盘[24-26],才能保证漏插率满足农艺要求,且不同的地区差异较大。随着育插秧技术的改进,杂交稻育秧播种量进一步降低,例如,李泽华等[27]以天优998和五优308为材料,试验得到钵形毯状秧盘和毯状秧盘的最佳播种量范围为65~80 g/盘;滕飞等[28]试验得到甬优12和中浙优1号最适播种量分别为65 g/盘和50 g/盘。如何通过降低播种量提高杂交稻秧苗素质并满足机插要求是目前机插育秧面临的难题之一,该问题的解决主要受制于播种均匀性、秧苗盘根性以及播种密度与取秧面积的耦合关系。
为实现低播量均匀播种,钟平等[29-30]对印刷播种技术进行了初步研究,播种效果如图4所示。
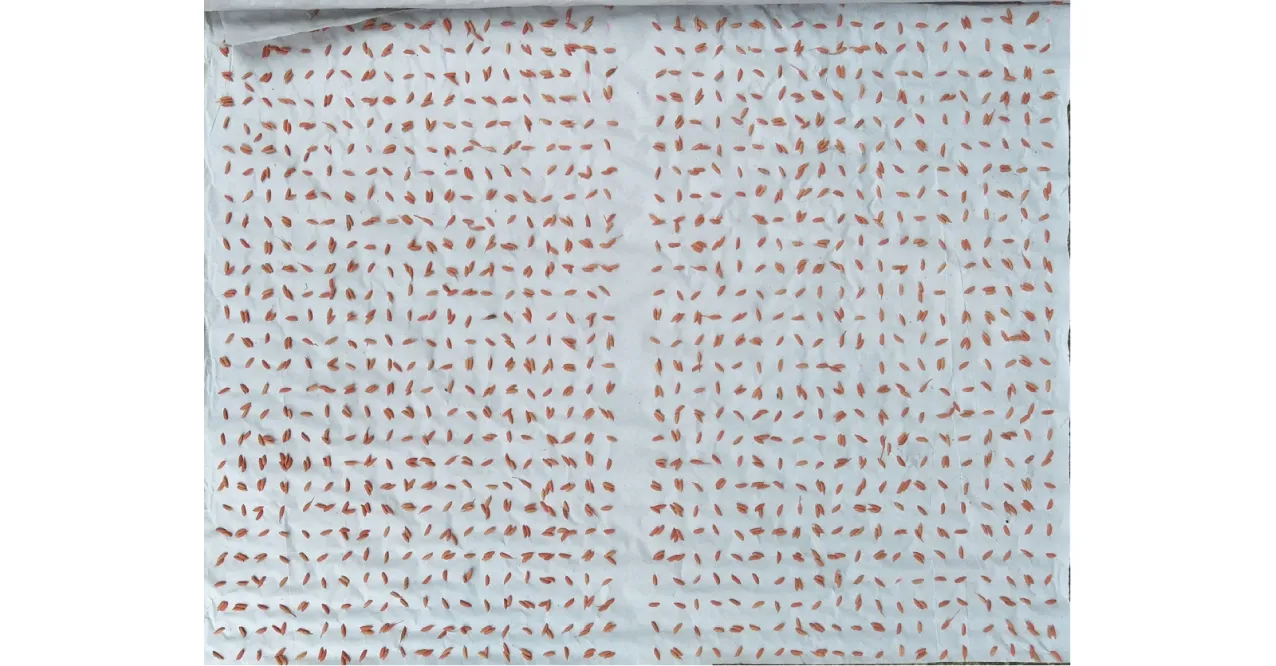
图4 印刷播种效果Fig.4 Rice printing-sowing
谢小兵等[31]对印刷播种和常规播种的秧苗素质进行了比较,并且进行了单本密植机插和常规机插的大田栽培对比试验,结果表明印刷播种的秧苗素质显著高于常规播种,增产10.28%~13.96%。然而,据湖南省的一些农民反映,该技术也存在一些问题:因播种量太低,秧苗成毯性较差,若延长秧龄,秧苗又太高,需要通过旱育化控技术进行控苗,实际栽插时漏插率偏高。
为解决低播量下秧苗盘根性不足问题,人们尝试应用中国农业科学院麻类研究所研发的“麻膜”进行育秧,结果表明[32-33]麻膜育秧能显著增加秧苗的物质积累能力、促进根系生长,秧苗素质明显提高,与不垫麻膜相比增产11.9%。但该技术在水稻生产上尚未大面积推广,还需系统深入研究。
对于钵体苗育秧,有大量文献[18-20,26]表明钵体苗的秧苗素质优于毯状苗和钵形毯状苗,问题是目前尚无成本低、性能可靠、作业效率高的钵体苗栽插机,育秧质量也依赖于播种机性能的提高。
2.2 水稻秧盘育秧播种技术与装备研究进展
常见的机械化育秧装备包括田间育秧播种机和工厂化育秧流水线,一般认为田间育秧播种机是从工厂化育秧流水线演变而来,属于半机械化设备,因此,工厂化育秧流水线是水稻育秧机械化的主要装备[21]。较完备的秧盘育秧流水线主要包括秧盘供送、铺底土、压床土、淋洒水、播种(条播、撒播、精播)、覆表土、清扫、取秧盘等工序,其中排种器是核心部件之一。随着秧盘育秧向自动化和智能化方向发展,育秧作业自动化技术和智能化技术也得到了快速发展。本节主要对水稻秧盘育秧的精密播种技术、作业自动化技术和智能化技术3方面的研究动态进行综述,对我国水稻秧盘育秧播种技术的发展前景和发展趋势加以展望。
2.2.1水稻秧盘育秧精密播种技术
根据农艺要求,水稻秧盘育秧的播种方式有穴播、条播和撒播3种,培育出的秧苗分别为钵体苗和毯状苗(含钵形毯状苗)。一般地,根据播种装置的结构形式和工作原理分类,排种器主要有机械式、振动式和气力式,但实际中有些是几种方式的组合,本文称为组合式。图5给出了国内外排种器的主要类型。

图5 排种器的主要类型Fig.5 Main form of seeding apparatus
对水稻而言,美国、意大利、澳大利亚等欧美发达国家以机械化直播种植为主,研制水稻秧盘育秧播种的设备比较少,排种器主要用于水稻直播等[21,34-36];亚洲的水稻秧盘育秧设备比较多,日本和韩国的水平最高,日本的久保田、井关、洋马、实产业等株式会社都有自己的秧盘育秧播种设备,其工艺精湛、自动化程度高,但这些设备主要是针对常规稻育秧研制,能实现4~8粒/格的撒播或3~6粒/穴的穴播作业,不适用杂交稻或超级杂交稻1~3粒/格的需要,采用的排种器主要是机械式[21]。例如,图6为久保田2BZP- 800(SR- K800CN)型育秧播种机中采用的外槽轮。

图6 外槽轮Fig.6 Open type sowing roller
我国水稻精密排种器的研发始于20世纪70年代初,早期主要是机械式排种器,80年代初开始气力式排种器的研究[37],同时开展育秧流水线的研制,90年代起研制振动式播种流水线[38],21世纪以来,除了适应水稻直播的排种器有较多的研究外,我国水稻秧盘育秧播种器的研发也取得了快速发展[39-53]。纵观这些排种器,基本上覆盖了图5所示的各种类型。例如,中国农业大学研制的2ZBZ- 600型水稻穴(平)盘播种设备[39],采用的是外槽轮式排种器。目前,我国市场上销售的播种机部分采用该类排种器。此外,佳木斯市文岭农机制造厂研制的2FB- 840型水稻苗床播种机采用的是凸棒式排种器[40];黑龙江八一农垦大学研制的2BYLS- 320型水稻秧盘联合播种机[41]采用的是窝眼轮式排种器,研制的2BS- 420型水稻植质钵育秧盘精量播种机[42]采用的是型孔板式排种器,并探讨了正三角形、正方形、圆形等多种型孔对播种性能的影响,结果表明圆形相对较好;山西农业大学设计了一种倾斜圆盘式精少量排种器[43];华南农业大学李志伟等[38]采用电磁振动排种机构设计了2BZ- 300型电磁振动式水稻育秧播种流水线等。马旭等[44-45]采用螺旋勺轮式排种器设计了一种适用于南方水稻田间育秧的精密播种机,之后又利用螺旋勺轮供种、V- T型气动振盘排种,研制了一种2SJB- 500型水稻秧盘育秧精密播种流水线。该流水线采用的是一种较典型的组合式排种器(图7),播种时,由变频调速电动机带动螺旋勺轮排种器在种箱中运动,实现定量供种,种子落入V- T型振盘的T型筛分板上,通过振动在V型槽板内形成均匀的种子流,然后对行对穴实现精密播种。周海波等[46]在此基础上又设计了一种电磁振动勺型外槽轮式定量供种装置,有望进一步提升该机的播种性能。

图7 组合式排种器Fig.7 Combined-type seeding device
江苏大学李耀明等[47-49]对气吸振动式精密播种机进行了系统研究,采用的主要是吸盘式排种器(图8)。播种时,启动振动电动机,通过振动使得种子呈“沸腾”运动状态,通过竖直单轨道丝杆螺母传动系统和水平单轨道丝杆螺母传动系统将吸种盘移动到种子盘上方,调节吸种部件转换开关使得气室形成负压,抛起的种子被吸附在均匀分布的吸种孔上;吸种后将吸种盘移动到导种管上方合适位置,调节转换开关产生正压,种子在气室正压力和自身重力作用下经导种管落入育秧盘,实现对靶精播。该装置虽能实现单粒精密播种,但对于水稻芽种,吸种孔容易堵塞。此外,江苏大学胡建平等[50-51]基于磁吸式排种原理,设计了磁吸滚筒式穴盘育苗精密排种器;东北农业大学韩豹等[52-53]在中国农业大学庞昌乐等[54]的气吸式双层滚筒播种器的基础上,针对吸孔堵塞问题,研制了一种气吸滚筒式自动清堵排种器,并进行了性能改良。

图8 气吸式播种装置结构图Fig.8 Structure diagram of suction-vibration precision seeder1.定量加种装置 2.竖直单轨道丝杆螺母传动系统 3.L形连接架 4.水平单轨道丝杆螺母传动系统 5.吸种盘 6.振动弹簧 7.气室 8.振动电动机 9.导种管 10.种子盘 11.气泵电动机
总之,为解决我国水稻特别是杂交稻的秧盘育秧精密播种问题,国内学者对现有的各种排种器进行了广泛探索性研究,取得了丰富的成果。存在的问题主要是各种研究都尚未系统彻底地解决杂交稻和超级杂交稻的精密播种问题,多数都停留在试验阶段,没有将相关的研究成果转化为实用的生产装备。
从市场上看,目前我国销售的水稻秧盘育秧播种装备使用的排种器主要是机械式,部分是气力式。例如江苏云马农机制造有限公司生产的2BL- 280A型育秧播种机采用的是螺旋形外槽轮式排种器,井关农机(常州)有限公司生产的2BZP- 580A(THK- 3017KC)型育秧播种机采用的是槽轮式排种器,宜兴旭达机械制造有限公司的2BS- 1000型水稻盘育秧播种机采用的是窝穴式播种轮[55],盐城盎宇机械制造有限公司的2BJD- 840型水稻育秧播种机采用的是直槽轮式,都是属于机械式;台州市一鸣机械设备有限公司生产的YM- 0812型水稻育秧机采用的排种器属于气力式排种器。这些机型都是最近几年享受国家农机购置补贴的装备,具有较好的代表性。
从排种器的设计原理上看,现有秧盘育秧精密排种器的设计主要有3类方法:①通过控制种子的体积控制排种量,例如窝眼轮式、型孔式排种器等,利用排种器上的容腔从种群中分离出种子,此时排种效果受制于种子的形状、尺寸和容腔的形式等,因此这类装置对不同水稻品种播种的普适性相对较差。②通过控制种子的质量控制排种量,例如气力式排种器等,该方法的优点是对种子的形状和尺寸等要求较低,但对吸孔结构的密封性等要求较高,该方法播水稻芽种时面临的最大困难是堵塞问题,且效率偏低。③通过控制种子流量控制排种量,例如槽轮式、振动式排种器等,这类排种器播种时播种量通常比较大,适合常规稻播种,若要播种杂交稻,需要配合其它的装置(如V型导种槽等)进行工作,因种子流速受众多复杂因素的影响,精确性还有待提高。综上可见,现有单一的排种方法很难实现杂交稻1~3粒/格的精确播种,因此需要继续学习国内外先进的理论和方法,加强精密排种理论的研究和创新,其中组合式排种器是一个可行的发展方向。
与国际排种器的研究进程比较,我国水稻秧盘育秧排种器的研究虽然借鉴了已有的研究成果,但基本上也遵循着从机械式、振动式、气力式向组合式方向发展的轨迹。目前,国际上先进的精密排种器普遍采用了组合式工作原理,正朝着大型、高效、智能化方向发展[36,56]。可以预见,未来我国水稻秧盘育秧精密排种器的研究也将向组合式方向发展。
2.2.2水稻秧盘育秧作业自动化技术
随着农机装备技术水平的发展,人们对提高水稻秧盘育秧设备自动化程度的要求愈来愈高。特别是育秧流水线包含供盘、覆土、淋水、播种、取盘等多道工序,为提高各部件的工作性能和各环节之间的协调性,人们对育秧流水线自动作业的控制系统进行了广泛深入的研究[57-62]。
目前,欧美和日本等国家的育秧播种系统已基本实现全自动化作业[63],例如日本Soyono公司的BOX- B010- G型播种机是小型育苗播种设备的代表,该机采用伺服精确定位控制和气动技术,能实现自动播种,工作效率高[64],其它如久保田、洋马等播种流水线都能实现自动化作业[65-66]。国内,人们对育秧流水线的自动化技术也进行了系统的研究。例如华南农业大学马旭等[67-72]针对软、硬秧盘,设计了一种软秧盘嵌入式托盘,实现了软、硬秧盘的自动供送 (图9a),以STM32单片机为控制核心,设计了一种电控式自动供盘装置,实现了软、硬秧盘的自动供盘作业,试验表明软塑秧盘和硬塑秧盘的供盘成功率分别达到98%和100%[68];采用电磁换向阀和气缸相结合的控制方法, 研制了一种秧盘连续输送与穴孔同步对中装置,解决了高速连续式气吸滚筒秧盘育苗精准播种的连续输送秧盘与气吸滚筒的穴孔同步对中的难题,提高了投种准确性,避免了因窜穴而产生的空穴和重播[69];以AT89C51单片机为控制系统核心,采用步进电机和开关等实现秧盘供送、秧盘孔穴与压实辊指对准等作业,设计了一种水稻播种机钵体软、硬秧盘穴孔底土压实通用装置,试验表明当生产率在500盘/h、提前角对应弧长为1 mm时,对准率为98%[70];基于超声波传感器和单片机等研制了一种种层厚度检测和控制系统,能对播种过程中的播种量实现全程监控和自动控制[71];以PLC为控制核心,设计了一种气动式自动叠盘装置(图9b),实现了秧盘的自动叠放工作,试验表明当生产率为 600~800盘/h、升降速度为 0.15 m/s、采用气动移动盖板时,硬盘和软秧盘的叠盘成功率分别为 100%与99%~100%[72-73]。目前,国内市场上的水稻育秧流水线大部分都能实现从自动供盘、铺床土、播种、洒水到覆表土和自动叠盘的作业自动化。

图9 自动供盘和自动叠盘装置Fig.9 Automatic tray feeder and automatic stacker device
控制系统是机械装备实现自动化的核心组成部分,其设计水平表征着自动化水平的高低。国外,早期的育苗播种流水线采用的控制方式主要为液压控制、气动控制或电磁控制,现在则主要采用单片机和可编程控制器(PLC)等进行控制[74]。国内水稻播种育秧流水线各环节的自动化作业也主要以单片机和PLC为控制核心,例如吉林大学研制的YB- 2000型简塑秧盘自动精密播种生产线采用MCS- 51系列的8031单片机作为控制单元,实现自动填土、播种、覆土、洒水和秧盘输送等[75],南京农业机械化研究所研发的振动气吸式盘育秧精密流水线采用PLC为控制核心,实现播种的精确定位和对位落种等功能[62],华南农业大学研制的2SJB- 500型水稻秧盘育秧精密播种流水线采用PLC为控制核心实现自动供盘和自动叠盘作业[72-73]等。与国外先进的育秧流水线比较,我国的育秧作业自动化技术还存在一些差距,主要表现为:①实际生产中的播种流水线还没有实现全自动化,某些环节仍需人工操作完成。②播种流水线上涉及的装置较多,作业环节多,现有技术对单一装置控制时效果相对较好,但对所有装置的同步控制技术还亟待提高和完善。③作业的可靠性和效率还有待进一步提高。总之,秧盘育秧作业自动化是一个系统工程,既包括硬件配备,也包括软件设计。未来,我国水稻秧盘育秧作业自动化应充分应用电子技术和计算机技术,向机械与微电子技术相结合的机电一体化方向发展。
2.2.3水稻秧盘育秧精密播种智能化技术
智能化是水稻播种育秧作业自动化发展的高级阶段,也是农机装备发展的方向,其中播种质量的智能化监控技术是研究重点。对播种质量进行智能化监控,一方面能检验播种效果,对排种器的排种性能进行评价;另一方面能对漏播、重播和播种量等进行预警和调控,提升播种质量,保障播种的稳定性。
欧美等发达国家在水稻直播播种质量监控技术方面已达到很高的水平,例如美国Precision公司和AgLeader 公司在播种机中采用排种器电驱控制技术、高速投种技术、播种监测技术、播种压力控制技术和防堵清草技术等,达到了播种均匀度一致和深浅一致的播种效果[76]。国内在智能化水稻机直播方面也取得了快速发展,如2016年南京农业机械化研究所研制出国内首台33行大型智能化气力集排式水稻直播机——2BDZQ- 33800型宽幅折叠式水稻直播机,该机播种作业仅由一名操作人员即可完成,能通过控制系统调整排种部件转速,进而实现播量的精确调整,有效解决现有机械槽轮式播种机播量一致性难以保证的难题,填补了国内大型气力式智能化水稻直播技术空白。然而,水稻秧盘育秧播种质量监控技术则相对落后。
一般地,播种质量监控可分为排种器性能的动态监控和育秧盘内播种情况的静态监控[77]。水稻直播播种质量的监控主要采用动态监控方法,秧盘育秧播种质量的监控目前主要采用静态监控方法。动态监控技术方面,欧美、澳大利亚等国家主要应用了电子技术和高速摄像技术实现排种器性能的动态检测。例如,KARAYEL等[78]用高速摄像系统拍摄下落种子流的间距和速度,通过分析相关数据达到检测的目的;LEEMANS等[79]用计算机视觉指导排种器定位,由机器视觉系统测量位置,再应用于反馈控制回路,实现播种质量的动态检测。静态监控技术方面,国内外主要采用图像处理技术和机器视觉技术实现育秧播种质量的检测。NAGATA等[80]提出用图像处理技术实时检测自动育秧生产中的漏播问题,在此基础上,MGANILWA等[81]提出了用机器视觉技术来检测移动秧盘内的漏播情况,并及时对漏播位置进行补种的方法;URENA等[82]用机器视觉技术监测了育秧盘中种芽的育秧质量,并用模糊规则进行了等级分类; KIM等[83]设计了一种基于机器视觉技术的自动排种控制装置,检测播种过程中种子胚芽方向,并通过PLC控制系统将种子按胚芽一致的纵向方向播种在秧盘里,提高播种的质量和精度。这些研究多是针对蔬菜和花卉进行的实验,对水稻播种质量的监控研究有一定的借鉴意义。国内,对水稻秧盘育秧播种质量的监控方法也主要是采用图像处理和机器视觉技术等,不同点主要在图像识别算法上。例如,齐龙、周海波等[84-85]依据秧盘掩膜内的灰度均值实现了对空穴、1粒和2粒种子的在线检测,并基于LabVIEW图像处理技术探索了点位控制补种技术[86-87],图10为检测系统的硬件组成。

图10 在线检测系统的硬件组成Fig.10 Structure of hardware for on-line detection system1.光源 2.CCD摄像机 3.光箱 4.图像采集卡 5.计算机 6.托盘 7.穴盘 8.前接近传感器 9.后接近传感器
王辰星等[88]通过投影、差分等方法处理静态图像,将分水岭算法和区域面积统计方法结合用于种子数量的识别;谭穗妍等[89]针对多粒种子存在粘连、重叠、交叉等情况,提出了一种基于机器视觉和BP神经网络超级稻数量检测模型;赵郑斌等[90]设计了基于HALCON的通用型穴盘精密播种性能检测软件,运用Blob进行种子分析和计数;王安等[91]用改进的形状因子,结合单连通域面积实现钵体秧盘穴粒数的检测;陈进等[92]应用GABP算法并结合超级稻连通区域形状特征参数对播种效果进行检测。现有秧盘育秧播种质量监控技术主要是监测育秧播种效果,重点解决漏播问题,减少漏播种造成的漏秧损失,但对重播等问题尚无相关解决方案。另外,与水稻直播相比,由于机械栽植育秧精密播种要求种子为芽种,至少要求破胸露白,种子的流动性不及干种,且容易破碎;育成的秧苗为了与栽植机械取秧机构协调耦合,要求种子在秧盘上按一定的方向有规则地均匀排列,因此机械栽植精密播种的质量要求比机直播更高,实现的难度也更大。这是现有水稻秧盘育秧播种技术不能完全适应杂交稻生产的重要原因之一,也是亟需大力发展智能化监控技术提升育秧播种质量的重要内驱力之一。
3 水稻机械化移栽技术与装备研究进展
水稻机械化移栽方式主要有毯状苗机插秧(含钵形毯状苗机插秧)和钵体苗机栽插2种。因此,从移栽装备的角度看,主要有两类机械:一类是适应毯状苗和钵形毯状苗的插秧机;另一类是适应钵体苗的插秧机。本节首先对水稻机械化移栽方式与装备现状进行概述,然后分别对毯状苗机插秧技术、钵体苗机栽插技术和移栽机械控制与智能化技术的研究进展进行阐述。
3.1 水稻机械化移栽方式与装备现状
总体上,国内外生产和使用的水稻移栽机,按操作方式分类,主要有步进式和乘坐式两大类,乘坐式又分为独轮乘坐式和四轮乘坐式2种;按移栽速度分类,主要有普通移栽机和高速移栽机。目前,市场上销售的机型主要有3种(表2),这3种典型的移栽机代表了目前的技术水平。

表2 3种典型的移栽机及性能Tab.2 Three typical rice transplanting machine and their performance
自2004年以来,我国水稻种植机械化快速发展,插秧机保有量也迅速增长。据全国农业机械化统计年报显示,全国插秧机保有量从2004年的6.71万台,增加到2015年的72.57万台,增长高于10倍;其中乘坐式插秧机保有量从2008年的9.01万台,增加到2015年的24.24万台,增长了1.69倍。图11给出了2004—2015年全国插秧机保有量的变化趋势,与全国水稻插秧机的增速相比,乘坐式插秧机的增长速度相对较慢,乘坐式插秧机占比由2008年的45.14%降低到2015年的33.40%,表明我国推广的插秧机从数量上看主要是步进式普通插秧机,这可能与我国水田面积细碎化和农户水稻种植规模相对较小有关。

图11 2004—2015年全国插秧机保有量Fig.11 Total number of rice transplanting machine in China from 2004 to 2015
水稻机械化移栽装备中,分插机构是核心工作部件。由于赵匀等[93]对水稻移栽机械的分插机构及其研究进展进行了详细总结,本文不再赘述。下面主要从毯状苗机插秧技术、钵体苗机栽插技术和水稻移栽机械控制与智能化技术等方面进行总结,主要分析存在的问题及其发展方向。
3.2 毯状苗机插秧技术
毯状苗机插秧技术是目前我国应用最广泛的一种水稻种植机械化技术,其发展经历了较长的一段历程。1953年,我国开始研制插秧机,到1960年,各地推荐生产上使用的人力、畜力插秧机已达21种,1967年,鉴定并推出自行研制的第一台东风- 2S型自走式机动水稻插秧机,但由于各种原因,该机并未得到普遍推广[94]。
1968年,日本佐藤造机株式会社制造出带土毯状小苗插秧机,该机横向送秧机构和插秧机构连动,自动将带土毯状小苗切断,强制插秧,奠定了现代插秧机的基本构造。1986年,日本农机研究所与井关农机株式会社共同开发制造高速插秧机,插秧速度1.1 m/s,这是现代高速插秧机的原型。随后,插秧机各部分的控制机构得到根本的改进,插秧精度进一步提高,如插秧部分左右摇摆控制、速度感应型插深控制、根据水田硬度自动液压控制等,毯状苗机插秧技术日趋成熟[95]。20世纪70年代末,我国从日本引进了秧盘育秧机插水稻种植技术,解决了育秧与机插秧的配套问题。在此基础上研制出了国产2ZT系列水稻插秧机[96],对我国机插秧发展起到了较大的促进作用。国产机中,较典型的还有延吉插秧机厂研制的2ZT- 9356B型独轮插秧机、江苏省南通市柴油机股份有限公司研制的Z- 455型手扶步进式插秧机和中机南方机械股份有限公司生产的碧浪2ZG824(630A)型高速插秧机。2010年,为了适应宽窄行插秧方式,东北农业大学研制了高速宽窄行插秧机。另外,无人驾驶水稻插秧机也得到了发展[94]。正是基于这段历史,长期以来毯状苗机插秧技术成为我国水稻种植机械化研究的重点。然而,毯状苗机插秧技术在我国的发展还主要面临如下一些难题:
(1)品种问题
现有的毯状苗机插秧技术是以常规粳稻为基础研发的,对杂交稻和超级杂交稻不适应,主要矛盾表现为:杂交稻种植强调稀植早发,通过强分蘖能力保障有效穗、攻取大穗提高单产,而毯状苗育秧时为保障一定的盘根成毯性,播种密度大,秧苗生长空间小,秧苗素质差,且机插植伤较重,栽后至恢复正常生长通常要经历7~15天的“滞长期”,缩短了正常生育期,生育进程后移[18],当机插育秧或栽插质量不理想时,严重影响杂交稻生育优势的发挥。目前,杂交稻机插秧问题尚未彻底解决。为解决杂交稻机插秧问题,通过低播量精密播种,培育适合机插的健壮秧苗是杂交稻育秧的发展方向。另外,调研表明我国水稻育种过程中,很少将“机械化生产适应性”作为品种培育的评选标准之一。因此,基于农机农艺深度融合发展理念,培育适应机械化生产的品种是解决我国杂交稻种植机械化难题需要考虑的重要内容。
(2)种植制度问题
双季稻和连作稻在我国水稻生产中占有很大面积,为了解决晚稻茬口紧张问题,需要培育长秧龄大苗,但现有毯状苗机插秧技术仅适应于中小苗栽插,限制了该技术在双季晚稻和连作晚稻中的推广应用。如何解决双季晚稻和连作晚稻的机插秧问题是目前我国水稻种植机械化发展中的难点。
(3)杂交稻精密育插秧技术问题
理论上,杂交稻精准栽插要求每穴插1~3棵苗,此时播种量芽种为40~45 g/盘,现有的撒播和条播技术虽能满足播种量要求,但播种均匀性有待提高,秧苗盘根性不足,栽插漏秧率偏高(试验表明此时的漏插率一般超过15%)。如果采用精准穴播技术,一方面缺乏能实现每穴播(2±1)粒种子的实用高效播种机,另一方面缺乏合适的毯状苗精准插秧机。插秧质量是人们接受使用插秧机的最重要标准之一。影响插秧质量的因素很多,是一个从耕整地、播种育秧到机械栽插的系统问题。就插秧机本身而言,其核心工作部件主要包括分插机构和送秧机构。国际上,插秧机的分插机构大致经历了从初级阶段的滑道机构,到中级阶段的杆机构,再到高级阶段的回转机构的发展过程[93]。目前,较先进的高速插秧机采用的都是回转式分插机构,部分手扶插秧机仍采用曲柄摇杆式(如洋马AP4、AP6型等)。国内外,适应毯状苗机插秧的分插机构已基本成熟,作业质量可靠,能基本满足实际生产需要。但送秧机构还需改进。送秧机构包括横向送秧机构和纵向送秧机构。横向送秧通常采用空间双螺旋凸轮机构实现固定次数(如14、16、18、20、24次等)的定量供送,因此横向送秧准确可靠。目前毯状苗插秧机的纵向送秧都是采用整体推送式送秧机构,当秧箱横向移动至两端极限位置时,通过纵向送秧机构(星轮式或橡胶输送带式送秧机构)将秧苗整体向秧门推送一次实现纵向送秧,受重力或机器振动的影响,以及秧苗成毯质量、秧苗含水量等原因,秧苗易产生滑动或挤压变形,导致纵向送秧不准确[97],亟需改进纵向送秧方法与装备,以提高纵向送秧精准性。总之,解决毯状苗机插秧的作业质量问题,重点需要解决杂交稻低播量下的精密育插秧技术问题,该问题主要受制于播种的均匀性、栽插的精准性和作业效率等。
(4)施肥机械化问题
国外如日本、韩国生产的毯状苗插秧机都配有同步侧深施肥装置,能有效地提高肥料的利用率;这些施肥装置主要采用风力把固态肥料颗粒吹入输肥管,风力作用能有效防止输肥管和排肥口堵塞,施肥效果较好,但由于价格、肥料特性和差异化技术设备销售等原因,在国内应用较少[98]。国内普遍采用人工施撒肥料,肥效利用率低;目前已开展了多种水稻插秧机同步施肥装置的试验研究,排肥部件主要有风力式、槽轮式和螺旋式等[99]。但因国内的肥料极易潮解,水田作业环境下风力式和槽轮式排肥装置易堵塞,施肥效果差,螺旋式排肥装置处于试验之中[100];采用开沟方式实现深施肥作业,主要存在开沟难、开沟施肥后覆土难等问题。迄今为止,我国水田机械深施肥技术尚未得到很好的解决,为了提高肥料的利用率,减少污染,亟需对该技术进行深入的研究,并研发相关的施肥机械。
3.3 钵体苗机栽插技术
由于钵体苗机栽插技术不伤根,不伤苗,无返青期,秧龄弹性大,增产效果显著,解决了传统机插秧的不足,人们对钵体苗机栽插技术进行了广泛研究[101-104]。钵体苗机栽插主要有机抛秧、机摆栽和机插秧等多种形式,钵体苗机抛秧属于无序栽插技术,已应用很少,应用的技术主要集中在钵体苗机摆栽和机插秧。国外,最早研究和使用钵体苗栽插机械的国家是日本,后来有印度、韩国和尼日利亚等国。日本的井关和实产业公司已有钵体苗插秧机产品,但机具结构复杂、价格昂贵,使用成本高,配套的育秧设备仅适应常规稻,对杂交稻不适应。国内,吉林鑫华裕农业装备有限公司、中国农业大学、黑龙江农垦科学院、常州亚美柯机械设备有限公司、浙江理工大学和东北农业大学等单位,都开展了水稻钵体苗栽插机的研制,已开发出一些机型,例如东北农业大学与鑫华裕农业装备有限公司联合研制了2ZB- 630型水稻钵体苗插秧机(图12),该机分插机构采用双曲柄五杆机构完成钵体苗取苗、运苗和栽植,实现了使用钵体软秧盘进行钵体苗栽插作业,生产成本较低。2013年,在广东省肇庆市怀集县试验基地,华南农业大学马旭等应用该机具对杂交稻五优308进行了田间对比试验,增产效果明显,但生产效率太低、可靠性较差。

图12 2ZB- 630型水稻钵体苗插秧机Fig.12 2ZB- 630 rice seedling transplanting mechanism
近年来,常州亚美柯机械设备有限公司研制生产了2ZB- 6A(RXA- 60T)型钵体苗乘坐式高速摆栽机(表2),该机采用顶出式钵体苗自动栽植机构完成秧苗取秧、翻转、输送和栽植作业,是我国水稻钵体苗栽插机中相对较先进的产品。2017年,马旭等应用该机,配合华南农业大学研制的2SJB- 500型水稻秧盘育秧精密播种生产线进行精密播种,在广东省肇庆市农科所试验基地对杂交稻广8优165进行了大田栽插对比试验,结果表明钵体苗机栽插的单产比毯状苗机插秧提高0.96%~4.61%,比人工手插提高3.45%。试验表明该机作业效率相对较高,可靠性较好,这将促进人们对钵体苗机栽插技术进行更深入的研究,有望很快获得突破并应用于生产实践。然而,存在的问题是机具价格偏高,尤其是配套的秧盘价格更高,生产成本增加较大,所以目前难于大面积推广应用。
较多的试验研究表明,与毯状苗机插秧相比,钵体苗秧苗素质好[27,105],钵体苗机栽插的产量高、品质好[105-106],且能改善水稻株型、优化群体结构、提升抗倒伏性能[107]。另外,毯状苗机插秧育秧时,低播量的秧苗成毯困难,钵体苗机栽插能有效化解这一矛盾,这对解决杂交稻机械化种植难题是一种可行的途径。因此,钵体苗机栽插是一种较优的机械化种植方式。但是,该技术尚缺乏合适的高效栽插机械,攻克钵体苗轻简化栽插机械的研发难题、优化配套的育秧技术、降低生产成本是水稻钵体苗机栽插技术研究的核心问题。
3.4 水稻移栽机械控制与智能化技术
信息化和智能化是水稻移栽机械技术更高水平的标志,其中机械装备控制技术是研究的重要内容。现阶段,对水稻移栽机械装备控制技术的研究主要集中于自动导航和机械部件控制等方面。
水稻移栽机械自动导航技术主要包括GPS导航、机器视觉导航和惯性导航等。日本的研究相对早一些,例如WEISE等[108]用Trimble- RTK GPS确定和记录位置信息,用长度传感器测量转向角度,对水稻插秧机的转向轮的转向角和转弯半径的关系进行了研究,得到了转向半径(r)、轮距(wb)和转向角(δ)的关系为r=wb/cos(π/2-δ)。NAGASAKA等[109]基于CAN总线控制和GPS技术设计了一种适应于长毯式秧苗的自动导航插秧机,试验表明该机的横向跟踪误差小于0.04 m,航向角误差小于3.6°。张智刚等[110]将计算机技术、传感器技术、GPS技术和数据通讯技术等集成和融合,在久保田SPU- 68型插秧机上设计了基于DGPS和电子罗盘的导航控制系统。以该插秧机为平台,胡炼等[111]将插秧机转向机构、变速机构和插秧机具升降机构改造为电控操作,以直流电动机为动力,设计了专业的控制器,实现了自动控制;同时设计了一种基于CAN总线的分布式控制系统[112],提高了插秧机自动导航系统的可靠性,试验表明道路直线跟踪误差小于0.05 m。伟利国等[113]以XDNZ630型插秧机为平台,将插秧机的行走与栽插机构进行电控改造,以伺服电机为动力,设计了基于GPS技术的控制器,实现了插秧机的自动对行导航及地头转向。
机器视觉导航方面,YUTAKA等[114]利用NIR和RGB摄像机作为视觉传感器,对插秧机进行改装,解决了水田的水面倒影干扰问题;张小超等[115]采用多目机器视觉技术自动识别已插秧苗曲线轨迹并进行实时跟踪,实现了水稻插秧机的自动对行功能,设计了智能对行插秧机(图13),该机具的控制机构突破了农业机械高精度全自动导航的关键技术,实现了无人驾驶自动导航控制。迟德霞等[116-117]对插秧机视觉导航的基准线提取问题和导航信息获取问题进行了理论建模分析。

图13 水稻智能对行插秧机Fig.13 Smart on-line rice transplanter
惯性导航方面,MATSUO等[118]在乘坐式水稻插秧机上安装自动转向机构,由三轴地磁方向传感器、光纤陀螺仪、两轴倾斜传感器组成导航设备,对插秧机进行导航控制。田间试验表明,在30 cm距离内自动驾驶比人工驾驶多产生5 cm的偏差,但可节省8%的作业时间。NAGASAKA等[119]将RTK- GPS与惯性测量单元和光纤陀螺仪结合,应用在久保田SPU650插秧机上(图14),试验表明当插秧机速度为0.7 m/s时,最大直线偏差0.12 m,平均直线偏差0.055 m。此外,任文涛等[120]、谢昌盛等[121]和陈训教等[122]对插秧机无线遥控技术进行了初步探索。
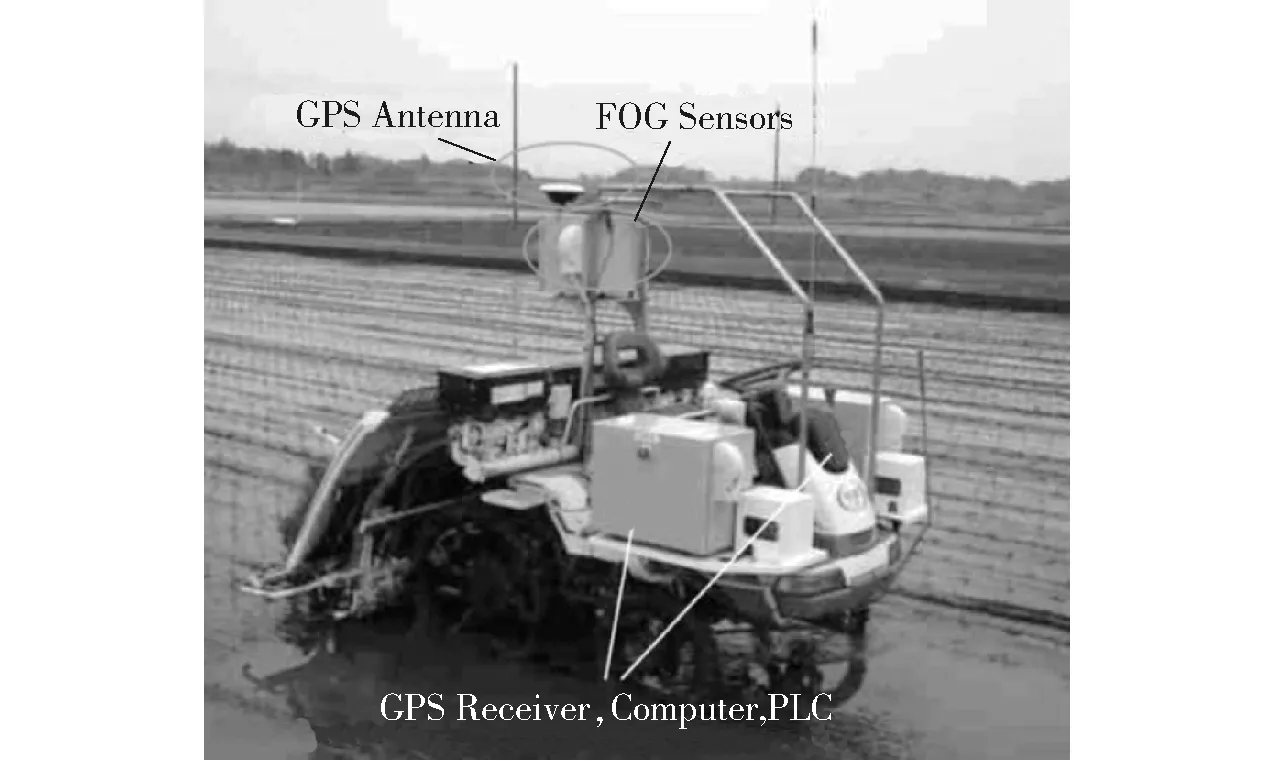
图14 惯性导航水稻插秧机Fig.14 Rice transplanter navigated by inertia sensors
机插秧的优势在于浅插并且插深一致,因此,在插秧机部件控制技术中,插秧机水平平衡控制和插深控制是当前水稻移栽机械部件控制技术研究的重点。目前,国内外高速插秧机对插深的自动控制主要是通过液压仿形机构来实现的,其工作原理按照机架和浮板的连接方式可分为整体式和铰接式2种,整体式连接属于力反馈控制系统,铰接式属于位置控制系统。插秧时仿形机构随着大田表面及硬底层起伏,液压控制机构不断调整插秧机插植部的仰俯状态,调节插秧臂的工作高度,实现插深的控制。图15为碧浪2ZG- 630四轮驱动高速插秧机的液压仿形系统,这是典型的整体式连接。

图15 高速插秧机仿形系统原理图Fig.15 Schematic diagram of high-speed rice transplanter’s profiling system1.机体 2.油压敏感度调节手柄 3.摇杆 4.上拉杆 5.下拉杆 6.机械式传感器 7.液压缸 8.仿形滑阀 9.仿形钢丝绳
水田中作业时,插秧机仿形滑阀由机械式传感器控制,当插秧机处在水田硬底层的下坡时,泥水表面与插植部的相对距离较小,浮板受到的浮力增大,浮板上的压力传感器通过仿形钢丝绳和调节手柄将压力变化传递给仿形系统的仿形滑阀,通过滑阀的阀芯运动控制液压升降机构,使得插植部上升,直到浮板的受力状态恢复到初始值[123]。实际上,插秧机仿形系统的控制一般与拖拉机耕深系统控制类似。在控制自动化方面,李福超等[124]以单片机MSP 430F149为核心部件,设计了一种水稻插秧机水平智能控制系统,该系统能实现对插植部位置的实时控制,保证插植部的倾角范围控制在±4°以内。张俊宁等[125]针对高速插秧机因地势起伏导致横向秧苗插深不一致问题,设计了基于插植部倾角检测的秧苗插深自适应调节系统,该技术能提高横向插深的稳定性。
总体上,由于各种原因,国内对移栽装备插秧部分水平平衡控制和插深自动控制的研究比较少,亟需加强相关研究,以提高栽插质量。随着对自动化和智能化的要求,加强移栽机械控制和智能化技术研究将是未来研究的重点。
4 水稻栽植机械化技术发展趋势
水稻栽植机械化技术是解决中国水稻种植机械化难题的主要方向。彻底解决水稻栽植机械化问题,需要系统地从耕整地、播种育秧到机械移栽3个环节进行整体性突破和完善。基于现有技术以及未来发展的需要,我国水稻栽植机械化技术将主要朝以下方向发展:
(1)从移栽方式上看,今后仍然是以毯状苗机插秧技术为主体的多种机械化并存的方向发展,并重点开展适应杂交稻和超级杂交稻机插秧技术,以及经济高效、轻简型钵体苗机栽插技术的研发和示范应用。
毯状苗机插秧技术相对成熟,在常规稻种植中将占主导地位,应用于杂交稻和超级杂交稻,主要突破低播量下精密播种育秧和精准栽插难题,研制精密育秧和精准插秧装备。现有毯状苗机插秧技术用于杂交稻时播种量大,秧苗素质差,每穴栽插的苗数多,产量低,不能满足杂交稻和超级杂交稻少本稀植、利用分蘖能力提高产量的栽培要求;解决的关键是采用低播量精密播种技术,以保证少本稀植,培育壮秧,并保证秧苗成毯性;同时,研制带有精准纵向供秧机构的插秧机,改现有依靠重力带动的纵向供秧方式为强制驱动的精准纵向供秧方式,保证分插机构对毯状秧苗的精准取秧与切块,实现少本稀植精准栽插。
钵体苗机栽插技术中,主要研制经济高效、轻简型水稻钵体苗栽插技术与装备。主要突破效率高、结构简单、投入成本低的钵体苗栽插技术与装备;采用钵体苗机栽插技术,育秧不存在播种量与成毯性之间的矛盾,是解决杂交稻和超级杂交稻机移栽作业问题的有效方法之一,因此,钵体苗机栽插技术具有十分广阔的发展前景,是未来水稻栽植机械化技术研究中的重点。
(2)育秧床土制备和育秧生产规模化将成为水稻栽植机械化发展的新特点。随着水稻生产机械化的发展,种植规模化将成为水稻生产方式的主要特点,为适应规模化发展,对育秧床土的制备和育秧生产的规模都提出了新的要求;我国现有的育秧床土制备方式不科学也不可持续,北方采用农田中取土育秧,对耕地的破坏较大,是一种不可持续的育秧技术;南方采用田间淤泥育秧,符合可持续发展,但育秧质量较差,影响栽插质量;需制备适于机械化操作、结构松散、通气性好、有利于秧苗根系的生长和成秧率较高的育秧床土,实现育秧床土的产业化,这是解决机栽植育秧取土难题的重要途径;在此基础上,实现育秧生产规模化,明确秧苗素质调控规律,提高秧苗素质,降低育秧生产成本,是保证水稻机械化栽插质量的重要措施,实现秧苗工厂化、规模化生产,也将成为水稻栽植机械化中育秧发展的新特点。
(3)重点解决连作晚稻和双季晚稻机械化栽植技术,通过育秧技术研究,延长连作晚稻和双季晚稻的秧龄,使之适应机移栽,同时研制大苗移栽机。我国连作晚稻、油菜- 水稻和小麦- 水稻等双季晚稻的种植面积较大,实现连作晚稻和双季晚稻机栽植技术的关键是其秧龄短的问题;目前我国机插秧技术主要适应中小苗,一般苗高要求在100~180 mm之间,秧苗太高时机栽插对秧苗的损伤较大,故应研究育秧技术,将目前连作晚稻和双季晚稻的秧龄从15 d左右,延长至25 d以上,控制秧苗生长,实现长秧龄机移栽,同时加快研制适应大苗的移栽机,以满足连作晚稻和双季晚稻的机移栽要求。
(4)研制具有同步施肥装置的插秧机,提高肥料利用率。目前我国使用的插秧机作业功能单一,缺少配套的施肥装置,肥效利用率低,需研制配备的同步施肥装置,有效地提高肥料利用率,减少环境污染。
(5)自动化和智能化技术将成为水稻栽植机械化技术研究中的热点。为适应现代化农业的发展,以及不同水稻产区的需要,水田栽植机械将向多功能、自动化与智能化方向发展,如自动化和智能化催芽机、自动化的工厂化秧盘育秧精密播种流水线、自动导航移栽机等。
5 结束语
我国水稻种植面积大、区域广,因气候及地理环境等差异,种植方式多元化,其中栽植机械化是种植机械化中的主要方式。水稻栽植机械化技术包括育秧技术、移栽技术和智能控制技术等多个方面。机械育秧技术的核心是精密播种技术,它保证提供均匀一致的种子流,培育适合机械移栽的健壮秧苗,为实现符合农艺要求的栽插奠定基础。机械移栽技术是将育成的秧苗栽插于大田中,满足一定的株距、行距和每穴苗数,保障每穴秧苗的栽插深度,减少漏穴率、伤秧率、翻倒率和漂秧率,实现满足农艺要求的高质量栽插。智能控制技术涉及育秧流水线作业自动控制、播种质量监控、移栽机自动导航、水平平衡控制、插深控制、送秧量自动调节等智能技术,使水稻栽植机械化向智能化方向推进,降低人工劳动强度、提升作业质量和提高资源利用效率,是农业现代化的重要内容。
为满足实际生产对水稻栽植机械化技术的要求,加强耕整地机械化技术研究与应用示范,解决杂交稻、超级杂交稻、双季晚稻和连作晚稻的机械栽植问题是水稻栽植机械化技术的研究重点,其中提升秧盘育秧精密播种的均匀性、解决低播量下精密播种育秧问题、解决毯状苗机插秧纵向送秧的精准性,研发经济高效、轻简型钵体苗栽插装备和农机农艺深度融合等是突破水稻栽植机械化的关键。
1 罗锡文,王在满. 水稻生产全程机械化技术研究进展[J]. 现代农业装备,2014(1):23-29.
2 白人朴. 关于水稻生产机械化技术路线选择的几个问题[J]. 中国农机化,2011,32(1):15-18, 22.
BAI Renpu. Several issues on the route choice of mechanization of rice production technology[J]. Chinese Agricultural Mechanization, 2011,32(1):15-18, 22.(in Chinese)
3 白人朴. 加快解决水稻种植机械化瓶颈制约的思考[J]. 中国农机化学报,2016, 37(12): 1-5,47.
BAI Renpu. Thinking of accelerating solutions to bottleneck restrictions of rice planting mechanization [J]. Journal of Chinese Agricultural Mechanization, 2016, 37(12): 1-5,47. (in Chinese)
4 罗锡文,李锡炼,刘涛,等. 水稻机械直播的现状及发展前景[C]∥中国农业工程学会2005年学术年会论文集,2005:194-196.
5 尹海燕,孟艳平. 水稻机械直播技术发展现状[J]. 农业科技与装备,2014(7):79-80.
YIN Haiyan, MENG Yanping. Development of rice mechanical direct seeding technology[J]. Agricultural Science & Technology and Equipment, 2014(7):79-80. (in Chinese)
6 ZHANG Guozhong, ZANG Ying, LUO Xiwen, et al. Design and indoor simulated experiment of pneumatic rice seed metering device[J]. International Journal of Agricultural and Biological Engineering, 2015, 8(4):10-18.
7 FU Wei, ZHANG Zhiyuan, ZANG Ying, et al. Development and experiment of rice hill-drop drilling machine for dry land based on proportional speed regulation[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(4):77-86.
8 陈聪,曹光乔,张萌. 中国水稻机插秧发展趋势预测与装备需求研究[J]. 云南农业大学学报,2015,30(2):289-293.
CHEN Cong, CAO Guangqiao, ZHANG Meng. Development trend forecast and equipment requirements of the rice transplanting mechanization[J]. Journal of Yunnan Agricultural University, 2015,30(2):289-293. (in Chinese)
9 李泽华,马旭,梁莉,等. 基于灰色关联的水稻种植机械化发展影响因素分析[J]. 应用基础与工程科学学报,2013, 21(6):1167-1177.
LI Zehua, MA Xu, LIANG Li, et al. Analysis of influence factors on development of rice planting mechanization based on grey correlation analysis [J]. Journal of Basic Science and Engineering, 2013, 21(6):1167-1177. (in Chinese)
10 陈洪礼,蔡建华,吴同源. 机插水稻应用现状与发展对策[J]. 北方水稻, 2009, 39(4):75-78.
CHEN Hongli, CAI Jianhua, WU Tongyuan. Current status of seedling transplanting by machine and development countermeasures [J]. North Rice, 2009, 39(4):75-78. (in Chinese)
11 何金均,王立臣,宋建农,等. 水稻种植机械化发展现状及制约因素分析[J]. 农机化研究, 2009, 31(2):1-4.
HE Jinjun, WANG Lichen, SONG Jiannong, et al. The progress of rice planting mechanization and analysis of its restrictive factors [J]. Journal of Agricultural Mechanization Research, 2009,31(2):1-4. (in Chinese)
12 吴茂力,姜心禄,池忠志,等. 成都平原水稻机插秧推广的难点与突破思路[J]. 杂交水稻, 2012, 27(1):58-59.
WU Maoli, JIANG Xinlu, CHI Zhongzhi, et al. Difficulties in extension of mechanized transplanting in rice production in Chengdu plain and the thinking of its overcoming strategy [J]. Hybrid Rice, 2012, 27(1):58-59. (in Chinese)
13 高汝霞,韩国路,闵思桂,等. 机插秧育、供、插过程中存在的问题及对策[J]. 北方水稻, 2013, 43(2):50-52.
14 熊元清,熊青琳. 水稻育插秧机械化技术推广调查与思考[J]. 基层农技推广,2016,4(10):72-74.
15 孙益东. 水稻机插秧推广缓慢的制约因素及对策[J]. 现代农业科技,2013(19):72-73.
16 朱德峰,陈惠哲. 水稻机插秧发展与粮食安全[J]. 中国稻米,2009(6):4-7.
17 高立均,张巫军,段秀建,等. 南方水稻机插秧技术的最新研究进展与发展建议[J]. 西南师范大学学报:自然科学版,2017,42(6):59-64.
GAO Lijun, ZHANG Wujun, DUAN Xiujian, et al. Latest research on machine-transplanted rice in Southern China[J]. Journal of Southwest China Normal University: Natural Science Edition, 2017,42(6):59-64. (in Chinese)
18 张洪程,龚金龙. 中国水稻种植机械化高产农艺研究现状及发展探讨[J].中国农业科学,2014,47(7):1273-1289.
ZHANG Hongcheng, GONG Jinlong. Research status and development discussion on high-yielding agronomy of mechanized planting rice in China [J]. Scientia Agricultural Sinica, 2014,47(7):1273-1289. (in Chinese)
19 HU Yajie, ZHANG Hongcheng. Optimizing nitrogen management strategy under wheat straw incorporation for higher rice production and nitrogen use efficiency [J]. Journal of Plant Nutrition, 2017, 40(4):492-505.
20 宋云生,张洪程,戴其根,等. 水稻钵体苗机插秧苗素质的调控[J]. 农业工程学报, 2013, 29(22):11-22.
SONG Yunsheng, ZHANG Hongcheng, DAI Qigen, et al. Seedling quality regulation of rice potted-seedling in mechanical transplanting [J]. Transactions of the CSAE, 2013, 29(22): 11-22. (in Chinese)
21 周海波,马旭,姚亚利. 水稻秧盘育秧播种技术与装备的研究现状及发展趋势[J]. 农业工程学报,2008,24(4): 301-306.
ZHOU Haibo, MA Xu, YAO Yali. Research advances and prospects in the seeding technology and equipment for tray nursing seedlings of rice [J]. Transactions of the CSAE, 2008,24(4):301-306.(in Chinese)
22 LIU Y L, DOKOHELY M E, FAN C H, et al. Influence of different seedling-nursing methods on methane and nitrous oxide emissions in the double rice cropping system of South China[J].Clean-Soil Air Water,2016,44(12):1733-1738.
23 黄程宽,孙桂琴. 水稻机插技术发展现状及育秧关键技术研究进展[J]. 现代农业科技,2017(15):14-16.
24 张锦萍,钟平,陈川,等. 杂交稻机插秧现状及关键技术研究进展[J]. 现代农业科技,2011(3):50-52.
ZHANG Jinping, ZHONG Ping, CHEN Chuan, et al. Status and research progress on key techniques of hybrid rice transplanting with machinery [J]. Modern Agricultural Science and Technology, 2011(3):50-52. (in Chinese)
25 罗汉亚,李吉,袁钊和,等. 杂交稻机插秧育秧播种密度与取秧面积耦合关系[J]. 农业工程学报,2009,25(7):98-102.
LUO Hanya, LI Ji, YUAN Zhaohe, et al. Coupling relationships of nursing seedling densities and finger sticking area by mechanized hybrid rice transplanter [J]. Transactions of the CSAE, 2009,25(7):98-102.(in Chinese)
26 张卫星,朱德峰,林贤青,等. 不同播种量及育秧基质对机插水稻秧苗素质的影响[J]. 扬州大学学报:农业与生命科学版,2007,28(1):45-48.
ZHANG Weixing, ZHU Defeng, LIN Xianqing, et al. The effects of different sowing densities and raising materials on seedling quality of mechanical transplanting rice [J]. Journal of Yangzhou University:Agricultural and Life Science Edition, 2007,28(1):45-48. (in Chinese)
27 李泽华,马旭,谢俊锋,等. 双季稻区杂交稻机插秧低播量精密育秧试验[J].农业工程学报,2014,30(6):17-27.
LI Zehua, MA Xu, XIE Junfeng, et al. Experiment on precision seedling raising and mechanized transplanting of hybrid rice under low sowing rate in double cropping area[J]. Transactions of the CSAE, 2014, 30(6): 17-27. (in Chinese)
28 滕飞,陈惠哲,朱德峰,等. 播种量对水稻机插秧苗成毯性及素质的影响[J]. 江西农业大学学报,2015, 37(3): 398-403.
TENG Fei, CHEN Huizhe, ZHU Defeng, et al. Effects of sowing rates on seedling root entwining and seedling quality of machine-transplanted rice [J]. Acta Agricultural Universitatis Jiangxiensis, 2015,37(3):398-403. (in Chinese)
29 钟平. 水稻机插秧印刷播种技术的研究[D]. 南京:南京农业大学,2014.
30 钟平,陈川,庄春,等.杂交稻机插秧印刷播种技术的应用[J].浙江农业科学,2012,53(4): 453-455.
31 谢小兵,王玉梅,黄敏,等. 单本密植机插对杂交稻生长和产量的影响[J]. 作物学报,2016,42(6):924-931.
XIE Xiaobing, WANG Yumei, HUANG Min, et al. Effect of mechanized transplanting with high hill density and single seedling per hill on growth and grain yield in hybrid rice [J]. Acta Agronomica Sinica, 2016,42(6):924-931. (in Chinese)
32 XIONG Changcai, TU Xiuliang, WANG Hongwu, et al. Effects of seedling cultivation with mat-fiber mulch on quality and quantity of early-season rice [J]. Agricultural Science & Technology, 2013,14(11):1559-1562,1574.
33 陈少愚,赵锋,李阳,等. 不同育秧模式对早稻机插秧苗素质的影响[J]. 湖北农业科学,2015,54(24):6151-6153.
CHEN Shaoyu, ZHAO Feng, LI Yang, et al. Effect of early season rice machine-transplanted seedling quality under different patterns [J]. Hubei Agricultural Sciences, 2015,54(24):6151-6153. (in Chinese)
34 SHARMA A R. Direct seeding and transplanting for rice production under flood-prone lowland conditions [J]. Field Crops Research, 1995,44:129-137.
35 YOO S N, CHOI Y S, SUH S R. Development of a precision seed metering device for direct seeding of rice [J]. Journal of Biosystems Engineering, 2005,30(5):261-267.
36 李洪昌, 高芳, 赵湛, 等. 国内外精密排种器研究现状与发展趋势[J]. 中国农机化学报, 2014, 35(2): 12-16, 56.
LI Hongchang, GAO Fang, ZHAO Zhan, et al. Domestic and overseas research status and development trend of precision seed metering device[J]. Journal of Chinese Agricultural Mechanization, 2014, 35(2): 12-16, 56. (in Chinese)
37 孙勇飞,吴崇友,张文毅,等. 水稻育秧播种机的发展概况与趋势[J]. 农机化研究,2013,35(12):210-215.
SUN Yongfei, WU Chongyou, ZHANG Wenyi, et al. Development situation and tendency of rice seedling planter [J]. Journal of Agricultural Mechanization Research, 2013,35(12):210-215. (in Chinese)
38 李志伟,邵耀坚.电磁振动式水稻穴盘精量播种机的设计与试验[J].农业机械学报,2000,31(5):32-34.
LI Zhiwei, SHAO Yaojian. Study and test of electromagnetic vibrating type rice seeder for hill seedling nursery box [J]. Transactions of the Chinese Society for Agricultural Machinery, 2000,31(5):32-34.(in Chinese)
39 王立臣,刘小伟,魏文军,等. 2ZBZ- 600型水稻播种设备的试验与应用[J]. 农机化研究,2000, 22(1):70-72.
40 吴慕春,吕恩利,王广海,等. 3种水稻田间育秧播种机的作业性能研究[J]. 安徽农业科学,2009,37(22):10700-10702.
WU Muchun, LÜ Enli, WANG Guanghai, et al. Study on working performance of three kinds of rice seeder for breed seedling in field [J]. Journal of Anhui Agricultural Science, 2009,37(22):10700-10702. (in Chinese)
41 梁远,陈英,乔春蓉,等. 2BYLS- 320型水稻秧盘联合播种机的研制[J].黑龙江八一农垦大学学报,2003, 15(1): 58-60.
LIANG Yuan, CHEN Ying, QIAO Chunrong, et al. A design of the 2BYLS- 320 model united sowing machine for paddy seedling on trays [J]. Journal of Heilongjiang August First Land Reclamation University, 2003,15(1):58-60. (in Chinese)
42 张欣悦,李连豪,汪春,等. 2BS- 420型水稻植质钵育秧盘精量播种机[J/OL]. 农业机械学报,2013,44(6):56-61. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20130611&journal_id=jcsam. DOI:10.6041/ j.issn.1000-1298.2013.06.011.
ZHANG Xinyue,LI Lianhao,WANG Chun,et al.Type 2BS- 420 precision seeder for rice seedling-growing tray made of paddy straw [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6): 51-56.(in Chinese)
43 崔清亮,侯华铭,郑德聪,等. 倾斜圆盘式谷子精少量排种器的设计与试验[J]. 农业工程学报,2016,32(12): 17-23.
CUI Qingliang, HOU Huaming, ZHENG Decong, et al. Design and test of tilt dise-type fine and small-amount seed metering device for foxtail millet [J]. Transactions of the CSAE, 2016,32(12): 17-23. (in Chinese)
44 马旭,邝健霞,齐龙,等.水稻田间育秧精密播种机设计与试验[J/OL].农业机械学报,2015,46(7): 31-37.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150705&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.07.005.
MA Xu, KUANG Jianxia, QI Long,et al.Design and experiment of precision seeder for rice paddy field seedling[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(7): 31-37. (in Chinese)
45 齐龙,谭祖庭,马旭,等. 气动振动式匀种装置工作参数的优化与试验[J]. 吉林大学学报:工学版,2014,44(6):1684-1691.
QI Long, TAN Zuting, MA Xu, et al. Optimization and test of operational parameters of pneumatic vibration uniform-seeds device[J]. Journal of Jilin University: Engineering and Technology Edition, 2014, 44(6): 1684-1691. (in Chinese)
46 周海波,梁秋艳,魏天路,等. 双级振动精密排种器外槽轮式定量供种装置设计与试验[J/OL].农业机械学报,2016,47(增刊):57-62. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2016s009& journal_ id =jcsam. DOI:10.6041/j.issn.1000-1298.2016.S0.009.
ZHOU Haibo, LIANG Qiuyan, WEI Tianlu, et al. Design and experiment of quantitative seed supply device with fluted roller used for double-vibrating precision seed meter [J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(Supp.):57-62. (in Chinese)
47 陈进,李建华,李耀明. 气吸振动盘式精密播种机吸种高度控制与加种装置[J/OL]. 农业机械学报,2013,44(增刊1):67-71. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2013s113&journal_id =jcsam. DOI:10.6041/j.issn.1000-1298.2013.S1.013.
CHEN Jin, LI Jianhua, LI Yaoming. Analysis of suction height and seed-adding device for suction-vibration precision seeder [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013,44(Supp.1): 67-71. (in Chinese)
48 陈进,李耀明. 气吸振动式播种试验台内种子运动规律的研究[J]. 农业机械学报,2002,33(1):47-50.
CHEN Jin, LI Yaoming. Study on seeds movement law in sowing test stand with suction and vibration[J]. Transactions of the Chinese Society for Agricultural Machinery, 2002, 33(1): 47-50. (in Chinese)
49 邱兵,张建军,陈忠慧. 气吸振动式秧盘精播机振动部件的改进设计[J]. 农机化研究,2002,24(2):66-67.
QIU Bing, ZHANG Jianjun, CHEN Zhonghui. Improve design of suction vibrating tray precision seeder vibration component[J]. Journal of Agriculture Mechanization Research, 2002,24(2): 66-67. (in Chinese)
50 胡建平,郑赛男,刘文东.磁吸滚筒式精密排种器设计与试验[J].农业机械学报,2009,40(3): 60-63.
HU Jianping,ZHENG Sainan,LIU Wendong.Design and experiment of precision magnetic cylinder seeder[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(3): 60-63. (in Chinese)
51 胡建平,李宣秋,左志宇. 磁吸滚筒式精密排种器试验及参数优化[J].农业工程学报, 2007, 23(9): 115-117.
HU Jianping, LI Xuanqiu, ZUO Zhiyu. Experiment and parameter optimization of magnetic precision cylinder-seeder [J]. Transactions of the CSAE, 2007, 23(9): 115-117. (in Chinese)
52 韩豹,吴文褔,王宏业. 水稻机摆钵育苗气吸滚筒式自动清堵排种器[J]. 农业工程学报,2009,25(9):96-99.
HAN Bao, WU Wenfu, WANG Hongye. Suction drum-type seed metering device with auto-cleaning block of transplanter for tray grown rice seedling[J]. Transactions of the CSAE, 2009,25(9):96-99.(in Chinese)
53 韩豹,杨亚楠,孟繁超,等. 气吸滚筒式自动清堵粳稻排种器的改进设计与性能试验[J]. 农业工程学报,2016,32(19):18-25.
HAN Bao, YANG Ya’nan, MENG Fanchao, et al. Improved design and performance experiment on air-suction drum-type seed metering device for rice with auto-cleaning block[J]. Transactions of the CSAE, 2016, 32(19): 18-25. (in Chinese)
54 庞昌乐,鄂卓茂,苏聪英,等.气吸式双层滚筒水稻播种器设计试验研究[J].农业工程学报,2000,16(5):52-55.
PANG Changle, E Zhuomao, SU Congying, et al. Design and experimental study on air-suction two-layer cylinder rice seeder[J]. Transactions of the CSAE,2000,16(5):52-55.(in Chinese)
55 张玲. 2BS- 1000型盘育秧播种机[J]. 农业机械,2000(12):30.
56 DOWLATI M, NAMJOO M. Development and evaluation of a pneumatic dibble punch planter for precision planting [J]. AMA-Agricultural Mechanization in Asia Africa and Latin America, 2016,47(5):53-59.
57 ZHAI Jianbo, XIA Junfang, ZHOU Yong. Design and experimental study of the control system for precision seed- metering device [J]. International Journal of Agricultural and Biological Engineering, 2014,7(3):13-18.
58 ZAREIFOROUSH H, MINAEI S, ALIZADEH M R, et al. Design, development and performance evaluation of an automatic control system for rice whitening machine based on computer vision and fuzzy logic[J].Computers and Electronics in Agriculture, 2016,124:14-22.
59 YANG Wanneng, HUANG Chenglong, LIU Qian. Development of an automatic control system for pot-grown rice inspection based on programmable logic controller [C]∥Computer and Computing Technologies in Agriculture V, PT III, 2012,370:112-118.
60 张锡智,李敏,孟臣. 精密播种机智能监测控制系统的研制[J]. 黑龙江八一农垦大学学报,2002,14(4):28-31.
ZHANG Xizhi, LI Min, MENG Chen. Research on aptitude watch and control system for precision seeder[J]. Journal of Heilongjiang August First Land Reclamation University, 2002,14(4):28-31. (in Chinese)
61 杨明金,杨玲,何培祥,等. 穴盘精密播种机控制系统的研究[J] .西南农业大学学报, 2002, 24(3):286-288.
YANG Mingjin, YANG Ling, HE Peixiang, et al. Development of a precision seeder control system[J]. Journal of Southwest Agricultural University, 2002, 24(3):286-288. (in Chinese)
62 余山山,张文毅,吴崇友,等. 盘育秧精密播种流水线PLC控制系统设计[J]. 农业工程学报,2009,25(11):202-207.
YU Shanshan, ZHANG Wenyi, WU Chongyou, et al. Design of PLC control system of precise seeding assembly line for rice seedling nursing[J]. Transactions of the CSAE, 2009, 25(11): 202-207. (in Chinese)
63 FOX T R, JOKELA E J, ALLEN H L. The development of pine plantation silviculture in the Southern United States [J]. Journal of Forestry, 2009, 105(7):337-347.
64 JIN Qiong, YANG Tingli. Overconstraint analysis on spatial 6-linkloops[J].Mechanism and Machine Theory,2012, 37(3): 267-278.
65 DU Ruicheng, ZHENG Chao, YANG Zidong. Study on low-carbon technique of maize mechanization and its development tendency in Huanghuaihai Plain[C]∥2011 International Conference on New Technology of Agricultural Engineering(ICAE), 2011:266-271.
66 EARL R, WHEELER P N, BLACKMORE B S, et al. Precision farming the management of variability [J]. Landwards, 1996, 51(4):18-23.
67 马旭,谭永炘,齐龙,等. 水稻秧盘育秧播种机气动式自动供盘装置设计与试验[J]. 农业工程学报,2016,32(22): 63-69.
MA Xu, TAN Yongxin, QI Long, et al. Design and test on pneumatic type automatic tray feeder of seeder for tray nursing seedings of rice[J]. Transactions of the CSAE, 2016, 32(22): 63-69. (in Chinese)
68 马旭,陈林涛,黄冠,等. 水稻秧盘育秧播种生产线电控式软硬秧盘自动供盘装置[J/OL].农业机械学报,2017,48(6): 41-49. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170605&journal_id =jcsam. DOI:10.6041/j.issn.1000-1298.2017.06.005.
MA Xu, CHEN Lintao, HUANG Guan, et al. Electric controlled automatic tray feeding device for hard and soft tray of rice precision seeding for nursing seedlings planter[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(6):41-49. (in Chinese)
69 周海波,马旭,刘明亮. 精准插秧机秧盘连续输送与穴孔同步对中装置[J].吉林大学学报: 工学版,2009, 39 (5): 1212-1217.
ZHOU Haibo,MA Xu,LIU Mingliang. Seedling tray continuous feed and synchronous cave-hole alignment device for precision paddy seedling transplanter [J].Journal of Jilin University: Engineering and Technology Edition,2009,39(5): 1212-1217.(in Chinese)
70 马旭,谢俊锋,齐龙,等.水稻育秧播种机钵体苗底土压实装置[J/OL].农业机械学报,2014,45(8): 54-60.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140809&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.08.009.
MA Xu,XIE Junfeng,QI Long,et al.Subsoil compaction device for rice seedling nursery planter of bowl seedling tray[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(8): 54-60.(in Chinese)
71 谭祖庭,马旭,齐龙,等. 振流式精密播种装置种层厚度检测及控制系统研制[J]. 农业工程学报,2012,28(21):10-16.
TAN Zuting, MA Xu, QI Long, et al. Detection and control system of seed-layers thickness for vibration-flow precision seeder[J]. Transactions of the CSAE, 2012, 28(21): 10-16. (in Chinese)
72 谭永炘. 气动式自动供盘与自动叠盘装置研究[D]. 广州:华南农业大学,2016.
73 马旭,谭永炘,齐龙,等. 水稻秧盘育秧精密播种流水线软硬秧盘自动叠放装置[J/OL].农业机械学报,2016, 47(3): 29-36.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160305&journal_id= jcsam. DOI:10.6041/j.issn.1000-1298.2016.03.005.
MA Xu,TAN Yongxin,QI Long,et al. Automatictray stacking device for hard and soft tray of rice precision seeding fornursing seedlings pipeline[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(3): 29-36.(in Chinese)
74 李旭. 烟草育苗精密播种流水线同步智能控制系统研究[D].长沙:湖南农业大学,2014.
75 吴文福,左春柽,阎洪余,等.YB- 2000 型简塑秧盘自动精密播种生产线的研制[J].农业工程学报,2001,17(6): 69-72.
WU Wenfu, ZUO Chuncheng, YAN Hongyu, et al. Development of automatic precision seeding system [J]. Transactions of the CSAE, 2001,17(6):69-72.(in Chinese)
76 罗锡文,廖娟,邹湘军,等. 信息技术提升农业机械化水平[J]. 农业工程学报,2016,32(20):1-14.
LUO Xiwen, LIAO Juan, ZOU Xiangjun, et al. Enhancing agricultural mechanization level through information technology [J]. Transactions of the CSAE, 2016, 32(20): 1-14. (in Chinese)
77 梁琨,罗汉亚,沈明霞,等. 水稻播种质量检测技术的研究进展及展望[J]. 浙江农业学报,2010, 22(2):253-257.
LIANG Kun, LUO Hanya, SHEN Mingxia, et al. Review and prospect for the detection technique of paddy seeding quality[J]. Acta Agricultural Zhejiangensis, 2010, 22(2):253-257. (in Chinese)
78 KARAYEL D, WIESEHOFF M, OZMERZI A, et al. Laboratory measurement of seed drill spacing and velocity of fall of seeds using high-speed camera system [J]. Computers and Electronics in Agriculture, 2006,50:89-96.
79 LEEMANS V, DESRAIN M F. A computer-vision based precision seed drill guidance assistance [J]. Computers and Electronics in Agriculture, 2007, 59:1-12.
80 NAGATA M, OKADA Y, MITARAI M, et al. Studies on seeding inspection system for plug seedling production factory- development of seed miss detection program [J]. Journal of Society of High Technology in Agriculture, 1999, 11(1): 1-9.
81 MAGANILWA Z M, NAGATA M, WANG H, et al. Studies on precision planting system for plug seedling production using machine vision-supplemental seeding method using image processing [J]. Journal of the Japanese Society of Agricultural Machinery, 2001,63(2):92-99.
82 URENA R, RODEIFUEZ F, BERENGUEL M. A machine vision system for seeds germination quality evaluation using fuzzy logic [J]. Computers and Electronics in Agriculture, 2001,32: 1-20.
83 KIM D E, CHO H K, CHANG Y S, et al. Development of an automatic seeding system using machine vision for seed line-up of cucurbitaceous vegetables [J]. Journal of Biosystems Engineering, 2007, 32(3):179-189.
84 齐龙,马旭,周海波. 基于机器视觉的超级稻秧盘育秧播种空穴检测技术[J]. 农业工程学报,2009,25(2):121-125.
QI Long, MA Xu, ZHOU Haibo. Seeding cavity detection in tray nursing seedlings of super rice based on computer vision technology[J]. Transactions of the CSAE, 2009,25(2):121-125.(in Chinese)
85 周海波,李洪波,王桂莲,等. 基于LabVIEW的超级稻秧盘播种质量检测技术研究[J]. 佳木斯大学学报:自然科学版,2012,30(5):731-734.
ZHUO Haibo, LI Hongbo, WANG Guilian, et al. Intelligent resow cavity detection in tray nursing seedlings of super rice based on LabVIEW[J]. Journal of Jiamusi University:Natural Science Edition, 2012,30(5):731-734. (in Chinese)
86 梁秋艳,周海波,潘锲,等. LabVIEW 图像处理技术在超级稻精密播种中的应用研究[J].安徽农业科学,2015,43(23):338-339.
LIANG Qiuyan, ZHOU Haibo, PAN Qie, et al. The application research of LabVIEW image processing technology in super rice precision seedling [J].Journal of Anhui Agricultural Sciences, 2015,43(23):338-339. (in Chinese)
87 梁秋艳,周海波,马晓君,等. 超级稻精密播种点位控制技术研究[J]. 农机化研究,2016, 38(11):91-94.
LIANG Qiuyan, ZHOU Haibo, MA Xiaojun, et al. Research of point to point motion control technology for super rice precision seeding[J]. Journal of Agricultural Mechanization Research, 2016, 38(11):91-94. (in Chinese)
88 王辰星,何瑞银. 基于图像处理的水稻育秧播种质量检测方法的研究[J].云南农业大学学报,2010,25(2):153-158.
WANG Chenxing, HE Ruiyin. Study on seeding quality detection ways for nursing seedlings of rice based on digital image processing [J]. Journal of Yunnan Agricultural University,2010,25(2):153-158. (in Chinese)
89 谭穗妍,马旭,吴露露,等. 基于机器视觉和BP 神经网络的超级杂交稻穴播量检测[J]. 农业工程学报,2014,30(21):201-208.
TAN Suiyan, MA Xu, WU Lulu, et al. Estimation on hole seeding quantity of super hybrid rice based on machine vision and BP neural network[J]. Transactions of the CSAE, 2014,30(21): 201-208. (in Chinese)
90 赵郑斌,刘昱程,刘忠军,等. 基于机器视觉的穴盘精密播种性能检测系统[J/OL]. 农业机械学报,2014,45(增刊):24-28. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2014s104&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.S0.004.
ZHAO Zhengbin, LIU Yucheng, LIU Zhongjun, et al. Performance detection system of tray precision seeder based on machine vision [J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(Supp.):24-28. (in Chinese)
91 王安,丁晓迪,马旭,等. 基于改进形状因子的钵体秧盘播种质量检测方法研究[J/OL]. 农业机械学报,2015, 46(增刊): 29-36. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20151105&journal_id =jcsam. DOI:10.6041/j.issn.1000-1298.2015.11.005.
WANG An, DING Xiaodi, MA Xu, et al. Research on the method of seeding quantity detection in potted seedling tray of super rice based on improved shape factor[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2015, 46(Supp.): 29-36. (in Chinese)
92 陈进,丁松,龚智强,等. 基于机器视觉和GABP算法的播种检测研究[J].测控技术,2017,36(9):18-23.
CHEN Jin, DING Song, GONG Zhiqiang, et al. Research on prediction of seed number in the hole based on machine vision and GABP algorithm [J]. Measurement & Control Technology, 2017,36(9):18-23. (in Chinese)
93 于晓旭,赵匀,陈宝成,等. 移栽机械发展现状与展望[J/OL]. 农业机械学报,2014,45(8):44-53. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140808&journal_id= jcsam. DOI:10.6041/j.issn.1000-1298.2014.08.008.
YU Xiaoxu, ZHAO Yun, CHEN Baocheng, et al. Current situation and prospect of transplanter[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(8):44-53. (in Chinese)
94 马旭,李泽华,梁仲维,等. 我国水稻栽植机械化研究现状与发展趋势[J].现代农业装备,2014(1):30-37.
95 阳晖. 日本水稻插秧机技术发展历程[J]. 湖南农机,2013(10):33.
96 蒲红,刘宇辉,孟然. 我国水稻栽植机械的研究现状及展望[J]. 佳木斯大学学报:自然科学版,2003, 21(2): 208-211.
PU Hong, LIU Yuhui, MENG Ran. The present status and outlook of the rice planting mechanism in our country[J]. Journal of Jiamusi University:Natural Science Edition, 2003, 21(2):208-211. (in Chinese)
97 杜立恒,俞高红,张国凤,等. 高速插秧机钵体毯状苗纵向送秧装置的设计与试验[J]. 农业工程学报,2014,30(14):17-25.
DU Liheng, YU Gaohong, ZHANG Guofeng, et al. Design and experiment of vertically feeding-seedling device for pot-blanket seedling based on high-speed rice transplanter[J]. Transactions of the CSAE, 2014, 30(14): 17-25. (in Chinese)
98 HOUX III J H, WIEBOLD W J, FRITSCHI F B. Long-term tillage and crop rotation determines the mineral nutrient distribution of some elements in a vertic epiaqualf [J].Soil & Tillage Research, 2011, 112(1):27-35.
99 付宇超,袁文胜,张文毅,等. 我国施肥机械化技术现状及问题分析[J]. 农机化研究,2017, 39(1):251-255,263.
FU Yuchao, YUAN Wensheng, ZHANG Wenyi, et al. Present situation and problem analysis of the technology of fertilizer mechanization in China[J]. Journal of Agricultural Mechanization Research, 2017, 39(1):251-255, 263. (in Chinese)
100 陈雄飞,罗锡文,王在满,等. 两级螺旋排肥装置的设计与试验[J]. 农业工程学报,2015,31(3):10-16.
CHEN Xiongfei, LUO Xiwen, WANG Zaiman, et al. Design and experiment of a fertilizer distribution apparatus with double-level screws[J]. Transactions of the CSAE, 2015, 31(3): 10-16. (in Chinese)
101 XIN L, LÜ Z, WANG W, et al. Optimal design and development of a double-crank potted rice seedling transplanting mechanism [J]. Transactions of the ASABE, 2017,60(1):31-40.
102 SUN L, MAO S, ZHAO Y, et al. Kinematic analysis of rotary transplanting mechanism for wide-narrow row pot seedlings [J]. Transactions of the ASABE, 2016,59(2):475-485.
103 ZUO Yanjun, ZHU Huixuan, CAO Peng. Design of transplanting mechanism with B-Spline curve gear for rice pot seedling based on UG[C]∥Computer and Computing Technologies in Agriculture VIII, 2015, 452:226-232.
104 ZHUO M, SUN L, DU X, et al. Optimal design and experiment of rice pot seedling transplanting mechanism with planetary bezier gears [J]. Transactions of the ASABE, 2014,57(6):1537-1548.
105 许轲,常勇,张强,等. 淮北地区水稻高产机械栽植方式对比[J/OL].农业机械学报,2014,45(12):117-125. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20141219&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.12.019.
XU Ke, CHANG Yong, ZHANG Qiang, et al. Optimal mechanical transplanting method for high-yield rice in Huaibei area [J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(12):117-125. (in Chinese)
106 张洪程,朱聪聪,霍中洋,等. 钵苗机插水稻产量形成优势及主要生理生态特点[J]. 农业工程学报,2013,29(21):50-59.
ZHANG Hongcheng, ZHU Congcong, HUO Zhongyang, et al. Advantages of yield formation and main characteristics of physiological and ecological in rice with nutrition bowl mechanical transplanting[J]. Transactions of the CSAE, 2013, 29(21): 50-59. (in Chinese)
107 邢志鹏,吴培,朱明,等. 机械化种植方式对不同品种水稻株型及抗倒伏能力的影响[J]. 农业工程学报,2017, 33(1): 52-62.
XING Zhipeng, WU Pei, ZHU Ming, et al. Effect of mechanized planting methods on plant type and lodging resistance of different rice varieties[J]. Transactions of the CSAE, 2017, 33(1): 52-62. (in Chinese)
108 WEISE G N,NAGASAKA Y, TANIWAKI K. An investigation of the turning behavior of an autonomous rice transplanter [J]. Journal of Agricultural Engineering Research, 2000,77(2):233-237.
109 NAGASAKA Y, SAITO H, TAMAKL K, et al. An autonomous rice transplanter guided by global positioning system and inertial measurement unit [J]. Journal of Field Robotics, 2009, 26(6-7):537-548.
110 张智刚,罗锡文,周志艳,等. 久保田插秧机的GPS导航控制系统设计[J]. 农业机械学报,2006,37(7):95-98.
ZHANG Zhigang, LUO Xiwen, ZHOU Zhiyan, et al. Design of GPS navigation control system for rice transplanter [J]. Transactions of the Chinese Society for Agricultural Machinery,2006,37(7):95-98. (in Chinese)
111 胡炼,罗锡文,赵祚喜,等. 插秧机电控操作机构和控制算法设计[J]. 农业工程学报,2009,25(4):118-122.
HU Lian, LUO Xiwen, ZHAO Zuoxi, et al. Design of electronic control device and control algorithm for rice transplanter [J]. Transactions of the CSAE, 2009,25(4):118-122. (in Chinese)
112 胡炼,罗锡文,张智刚,等. 基于CAN总线的分布式插秧机导航控制系统设计[J]. 农业工程学报,2009,25(12):88-92.
HU Lian, LUO Xiwen, ZHANG Zhigang, et al. Design of distributed navigation control system for rice transplanters based on controller area network[J]. Transactions of the CSAE, 2009, 25(12): 88-92. (in Chinese)
113 伟利国,张权,颜华,等. XDNZ630型水稻插秧机GPS自动导航系统[J].农业机械学报,2011,42(7):186-190.
WEI Liguo, ZHANG Quan, YAN Hua, et al. GPS automatic navigation system design for XDNZ630 rice transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011,42(7):186-190. (in Chinese)
114 YUTAKA K, KENJI I. A dual-spectral camera system for paddy rice seedling row detection [J]. Computers and Electronics in Agriculture, 2008,63(1):49-56.
115 张小超,胡小安,苑严伟,等. 精准农业智能变量作业装备研究开发[J].农业工程,2011,1(3):26-32.
ZHANG Xiaochao, HU Xiaoan, YUAN Yanwei, et al. Research and development of intelligent agricultural machinery on precision agriculture[J]. Agricultural Engineering, 2011,1(3):26-32. (in Chinese)
116 迟德霞,任文涛,刘金波,等. 水稻插秧机视觉导航基准线识别研究[J].沈阳农业大学学报,2014,45(5):559-565.
CHI Dexia, REN Wentao, LIU Jinbo, et al. Research of directrix recognition algorithm of vision navigation of transplanter[J]. Journal of Shenyang Agricultural University, 2014,45(5):559-565. (in Chinese)
117 迟德霞,任文涛,由佳翰,等. 水稻插秧机视觉导航信息获取试验[J]. 沈阳农业大学学报,2015,46(5):575-580.
CHI Dexia, REN Wentao, YOU Jiahan, et al. Experiment on acquisition of navigation information of unmanned rice transplanter based on machine vision[J]. Journal of Shenyang Agricultural University, 2015,46(5):575-580. (in Chinese)
118 MATSUO Y. Auto-steering rice transplanter for straight traveling[C]∥International Conference on Automation Technology for Off-Road Equipment, 2004: 292-297.
119 NAGASAKA Y,UMEDA N, KANETAI Y, et al. Autonomous guidance for rice transplanting using global positioning and gyroscopes [J]. Computers and Electronics in Agriculture, 2004,43:223-234.
120 任文涛,迟德霞,刘金波,等. 遥控插秧机自动转向系统设计与试验[J/OL]. 农业机械学报,2012,43(1):175-179. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20120131&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2012.01.031.
REN Wentao, CHI Dexia, LIU Jinbo, et al. Design and test on remote rice transplanter automatic steering system [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012,43(1):175-179.(in Chinese)
121 谢昌盛,蒋蘋,胡文武,等. 高速插秧机无线遥控驾驶系统的设计[J].湖南农业大学学报:自然科学版,2012,38(4): 441-445.
XIE Changsheng, JIANG Pin, HU Wenwu, et al. Research on driving system with wireless remote control in high speed rice transplanter [J].Journal of Hunan Agricultural University: Natural Sciences, 2012,38(4): 441-445. (in Chinese)
122 陈训教,吕志军,薛向磊,等. 无线遥控步行插秧机的设计与试验[J]. 农业工程学报,2017,33(17):10-17.
CHEN Xunjiao, LÜ Zhijun, XUE Xianglei,et al. Design and performance experiment of wireless remote control walking rice transplanter [J]. Transactions of the CSAE, 2017, 33(17): 10-17. (in Chinese)
123 SUN Junyan. The mechanization of rice transplanting cultivation technique for high yield [J]. Applied Mechanics & Materials, 2013, 416-417:1793-1797.
124 李福超,伟利国,刘阳春. 基于MSP430F149的水稻插秧机水平智能控制系统[J]. 电子设计工程,2010, 18(5): 31-33.
LI Fuchao, WEI Liguo, LIU Yangchun. Horizontal intelligent control system of rice transplanter based on MSP430F149 [J]. Electronic Design Engineering, 2010,18(5):31-33.(in Chinese)
125 张俊宁,张小超,李颉,等. 高速插秧机横向仿形插秧自适应系统的开发[J]. 农机化研究,2012,34(9):69-72.
ZHANG Junning, ZHANG Xiaochao, LI Jie, et al. Development of transplant depth self-adaptive control system based on transversely profile modeling in high speed transplanter [J]. Journal of Agricultural Mechanization Research, 2012,34(9): 69-72.(in Chinese)
猜你喜欢
南方农机(2022年23期)2022-12-01 09:07:14
新疆农机化(2022年1期)2022-03-02 09:44:18
江苏农业科学(2021年10期)2021-07-01 10:13:06
新农民(2019年36期)2019-02-20 04:12:07
时代农机(2019年5期)2019-02-11 10:52:34
农业工程学报(2018年24期)2019-01-14 10:42:32
农业机械学报(2018年6期)2018-07-05 11:38:18
农业科技与装备(2018年6期)2018-03-15 01:46:58
数学大王·低年级(2017年9期)2017-09-18 18:33:13
湖南农业(2016年3期)2016-06-05 09:37:35
