
玉米秸秆残茬侧向抛出动力学模型建立与试验
2018-05-31 03:15:34陈海涛史乃煜
农业机械学报 2018年5期
陈海涛 李 昂 史乃煜 徐 源
(东北农业大学工程学院, 哈尔滨 150030)
0 引言
2BMFJ系列原茬地免耕覆秸精量播种机利用秸秆侧向抛出的方式,集成原茬地种床整备、清秸防堵、精量播种、侧深施肥、覆土镇压、喷施药剂和秸秆均匀覆盖等多项功能于一体,一次进地完成原茬地高质量精密播种各项作业工序,已成为保障玉米、大豆、花生等作物实现精耕细作与保护性耕作融合的重要技术手段。本课题组前期对清秸装置关键部件进行了设计,并对其结构参数与作业参数进行了优化试验,实现了在高质量满足作业农艺要求的基础上,达到降低功耗、提高作业质量与效率的目标[1-6]。免耕播种技术可有效实现蓄水保墒、增加土壤肥力、提高作物产量[7-9],但秸秆还田量对作物生长、粮食产量及土壤微生物活性均有显著影响[10-11]。因此,在原茬地免耕覆秸精量播种机基础上,增设一种秸秆同步回收装置具有重要意义。
近年来,研究学者针对叶片式物料抛送装置进行了理论分析与试验研究。国外学者主要通过对抛送装置内部气流流场进行数值模拟、改进装置结构和作业参数来降低叶片式抛送装置的功耗、提高抛送效率以及增加抛送距离[12-17]。胡瑞谦[18]建立了质点沿抛送叶片运动的微分方程,讨论了各变量对质点运动的影响并对其进行了简化。贾洪雷等[19-20]建立了玉米秸秆切碎抛送装置中秸秆的运动微分方程(不计物料质量),设计了具有切碎与抛送功能的曲面直刃圆筒式刀片,并对刀片的切碎与抛送量的关系进行了研究。翟之平等[21]通过引入当量摩擦系数对物料沿抛送叶片运动的动力学模型进行修正,并通过对动力学模型与高速摄影得到的物料运动轨迹进行回归分析,得到了不同结构参数和作业参数下的当量摩擦系数值。上述研究为清秸刀齿的设计提供了参考依据,但均未涉及物料脱离抛送装置后的运动。
本文综合考虑玉米秸秆残茬(以下简称秸秆)侧向抛出过程中空气阻力、土壤干涉及其他不可控因素对秸秆运动轨迹的影响,建立含有修正系数的秸秆侧向抛出动力学模型,并通过试验建立修正系数的回归模型,以期为秸秆同步回收装置的设计提供理论依据。
1 工作原理
清秸装置的结构如图1所示,主要包括:机架、传动系统、动力输入轴和由清秸刀齿、刀轴、刀盘组成的清秸单体。其中机架用于承载各部件,播种单体通过平行四杆仿形装置与机架的副梁相联接。
机组作业时,清秸装置采用三点悬挂与拖拉机进行挂接。通过拖拉机动力输出轴和万向节传动轴驱动清秸装置动力输入轴,并由传动系统带动清秸单体连续转动,固连在清秸单体上的清秸刀齿将播种带上的秸秆和根茬一定程度粉碎并输送抛撒到清秸装置侧面,完成防堵和种床整备工作;回程作业时,清秸单体将该播种带内的秸秆和根茬等抛撒至上一行程的已播地表,从而同时完成覆秸作业。

图1 清秸装置结构示意图Fig.1 Structure sketch of clearing device1.机架 2.动力输入轴 3.传动系统 4.刀轴 5.刀齿 6.刀盘 7.副梁
2 秸秆侧向抛出的动力学模型
为充分利用清秸装置和被清秸装置抛出的秸秆的机械能,高效实现部分秸秆回收再利用,必须探明秸秆被侧向抛出的运动规律。为此,建立秸秆侧向抛出动力学分析模型,做如下假设:①秸秆与刀齿之间为非弹性碰撞,碰撞后秸秆沿刀刃方向运动的初速度为零;在秸秆与刀齿未分离阶段,只考虑秸秆在刀齿回转平面内的运动,在秸秆脱离刀齿后考虑其空间的三维运动。②在秸秆与刀齿未分离阶段,忽略空气阻力对秸秆运动的影响;在秸秆沿刀齿运动过程的动力学模型中引入当量摩擦系数μ,在秸秆脱离刀齿后的动力学模型中引入加速度修正系数k1~k4,修正土壤及秸秆间相互碰撞对秸秆各维度运动的影响。③忽略清秸刀齿旋转对空气流动的影响。
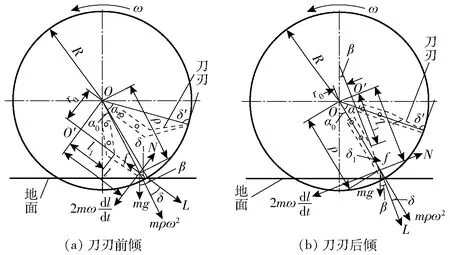
图2 秸秆在滑移过程中的受力图Fig.2 Schematic diagrams of forces born by stalks moving along knife teeth
2.1 秸秆沿刀齿运动过程的动力学模型
秸秆在沿刀刃滑移过程中的受力情况如图2所示,刀刃在刃尖处与切向速度的夹角δ′大于90°时为刀刃前倾,小于90°时为刀刃后倾,等于90°时为径向刀刃。秸秆所受外力有:重力mg,离心力mρω2,哥氏力2mωdl/dt,刀齿的法向反作用力N以及摩擦力f。转轴O水平配置,动坐标轴O′L沿刀刃方向且向外为正,随刀齿一起旋转。由O向O′L做垂线,垂足为O′(即动坐标轴O′L原点)[18,22]。
当清秸装置工作时,秸秆沿刀刃(即动坐标轴O′L)运动的微分方程为
(1)
其中
式中t——时间,s
ω——刀齿旋转角速度,rad/s
n——刀齿转速,r/min
R——刀齿回转半径,m
ρ——秸秆的回转半径,m
δ——离心力与刀刃的夹角, (°)
β——重力与刀刃的夹角,(°)
δ1——刀刃倾角, (°)
α0——初相位,(°)φ——摩擦角
α——刀齿转角,(°)
r0——坐标原点O到动坐标轴的距离,m
l1——秸秆的初始动坐标,m
l——秸秆动坐标,m
解上述方程得
l=C1eλ1ωt+C2eλ2ωt+Dcos(ωt+α0)+
Msin(ωt+α0)-μRsinδ1
(2)
其中

(3)
对式(3)求导可得秸秆沿刀刃运动的相对速度vr为
(4)
由式(3)可得,秸秆始终向外运动须满足
(5)
由式(5)可得最小角速度ωmin为
(6)
当刀刃后倾时,δ1>0,即μRsinδ1+l1>0恒成立,只需ω>ωmin即可保证秸秆始终沿着刀刃向外运动,且刀刃后倾角越大越有利于抛出。
当刀刃前倾时,δ1<0,若μRsinδ1+l1<0则秸秆不能被抛出,因此刀刃前倾时,秸秆被抛出的条件除转速需满足式(6)外,刀刃倾角δ1还应满足
(7)
设秸秆在刀刃上的运动时间为t0,此时秸秆动坐标l=Rcosδ1,则t0计算式为
(8)
将由式(8)求得的t0代入式(4)即可求得秸秆沿刀刃运动的相对速度vr,秸秆抛出角(从秸秆与刀刃碰撞到被抛出时刀齿旋转角度)φ=ωt0。
秸秆被抛出时在刀齿回转平面的绝对速度va为
(9)
其中
ve=ωR
2.2 秸秆脱离刀齿后的动力学模型
建立以刀齿回转中心为原点O的坐标系,X轴以水平方向机组外侧为正向,Y轴以重力反方向为正向,Z轴以清秸装置前进方向为正向,坐标系相对机架固定不动。XOY坐标系如图3所示。
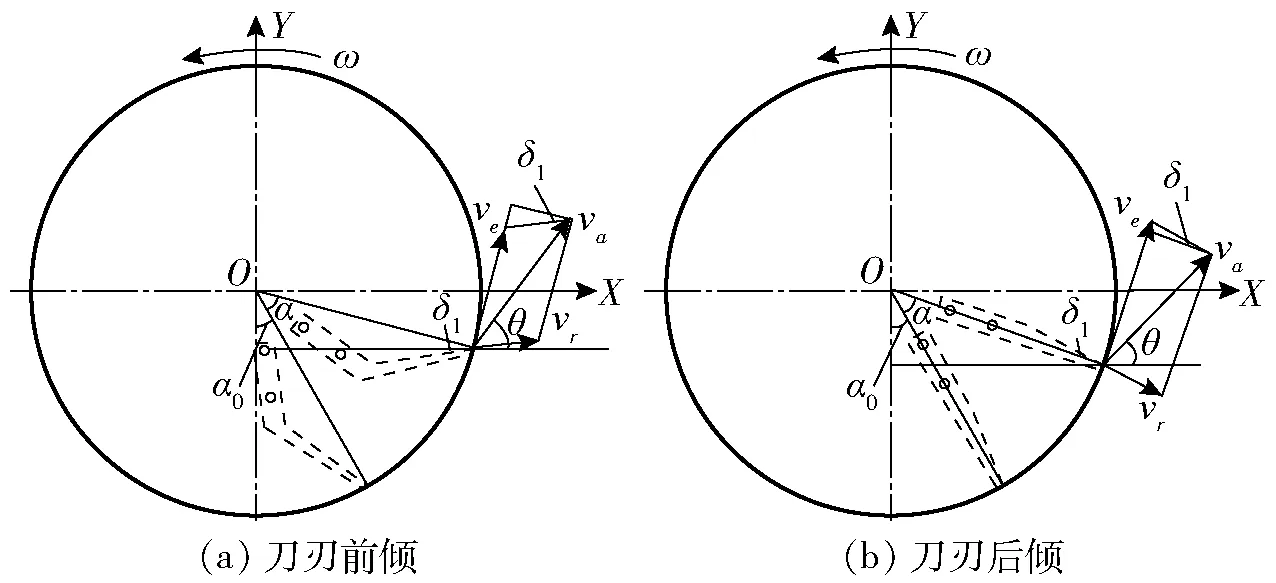
图3 秸秆在抛离刀齿时的运动分析Fig.3 Kinematic analyses of stalks departing from knife teeth
秸秆沿X、Y和Z轴的初始速度分量为
(10)

式中θ——秸秆在刀齿回转平面的绝对速度与X轴的夹角,rad
v1——清秸装置机组前进速度,km/h
为简化分析过程,以秸秆脱离刀齿时重新定义为时间起点,即t=0,对脱离刀齿后的秸秆进行动力学分析。
2.2.1秸秆上升阶段Y向的动力学分析
秸秆在上升阶段Y向的动力学方程及初始条件为
(11)
式中ay——Y向加速度,m/s2
FP——秸秆所受空气阻力,N
k1——秸秆上升阶段Y向加速度修正系数
vy——Y向速度,m/s
y——Y向位移,m
C——阻力系数
as——秸秆平均特征面积,m2
P——空气密度,kg/m3
y0——秸秆Y向初始坐标,m
对式(11)积分,解得上升阶段Y向秸秆位移与时间的关系为
(12)

由式(12)可得秸秆上升的最高点坐标y1和上升过程的运动时间t1。
2.2.2秸秆下降阶段Y向的动力学分析
秸秆在下降阶段Y向的动力学方程及初始条件为
(13)
式中k2——秸秆下降阶段Y向加速度修正系数
对式(13)积分,解得下降阶段Y向秸秆位移与时间的关系为
(14)
2.2.3秸秆X向的动力学分析
秸秆在X向的动力学方程及初始条件为
(15)
式中ax——X向加速度,m/s2
k3——X向加速度修正系数
vx——X向速度,m/s
x——X向位移,m
x0——秸秆X向初始坐标,m
对式(15)积分,解得X方向秸秆位移与时间的关系为
(16)
2.2.4秸秆Z向的动力学分析
秸秆在Z向的动力学方程及初始条件为
(17)
式中az——Z向加速度,m/s2
k4——Z向加速度修正系数
vz——Z向速度,m/s
z——Z向位移,m
对式(17)积分,解得Z方向秸秆位移与时间的关系为
(18)
联立式(12)、(14)、(16)、(18)可得以时间t为参数含有修正系数的秸秆空间运动轨迹参数化方程
(19)
3 修正系数回归模型试验
3.1 试验目的
不同作业参数及清秸刀齿结构下,修正系数不同[21]。建立秸秆侧向抛出动力学模型中修正系数与清秸装置作业及结构参数的回归模型,可将修正系数回归模型代入秸秆侧向抛出动力学模型中,以简化该动力学模型。
3.2 试验条件与仪器
试验于2016年10月28—29日在东北农业大学向阳农场进行,秸秆覆盖量为2.08 kg/m2,土壤硬度为27.4 kg/cm2,土壤含水率为31.9%,清秸刀齿入土深度为50 mm。
试验材料为人工收获后的玉米原茬地秸秆,平均直径25.7 mm,平均长度为669.3 mm,秸秆含水率为34%。清秸装置刀齿结构如图4所示。

图4 刀齿结构Fig.4 Structure diagram of knife teeth
主要试验仪器有:美国Vision Research公司生产的PhantomV5.1型高速摄像机(最大分辨率为1 024像素×1 024像素,最大拍摄帧速1 200帧/s)、华硕VM590型便携式计算机和电源线,佳能EOS 7D型摄像机,TZS- 1型土壤水分速测仪,TYD- 2型土壤硬度计,DGG- 9070AD型干燥箱;Photoshop 7.0软件和Free Video to JPG Converter V5.0.40软件。
3.3 试验方法
用三因素五水平二次回归正交中心组合设计试验方法,以刀齿转速n、刀刃倾角δ1及机组前进速度v1为试验因素,以修正系数k1~k4为试验指标,各项试验指标均以10次重复的均值为试验结果。
因素水平的确定方法参照文献[1]并结合式(6)、(7)。试验因素编码如表1所示。试验方案如表2所示。
试验数据处理流程如下:由图像获取秸秆各维度时间与相应位移数据;将数据分别代入动力学模型中,依据最小二乘法利用Matlab软件拟合得k1~k4;利用软件Design-Expert 8.0.6对试验结果进行分析并得出各修正系数的回归模型。

表1 试验因素编码Tab.1 Code of factors in experiments

表2 试验方案与结果Tab.2 Experiment plan and results
3.4 视频及图像信息的获取
试验时利用两台摄影机对秸秆抛出过程同时进行拍摄,以获取秸秆的空间三维运动轨迹。为得到秸秆的实际运动情况,避免拍摄角度对分析结果的影响,调整摄像机拍摄角度,分别使拍摄平面与刀齿回转平面及水平面平行。
利用软件Free Video to JPG Converter V5.0.40将视频转换为图片格式,并导入Photoshop 7.0软件中进行测定分析。由于秸秆空间运动呈射流状,观察分析时,选取处于物料中线的秸秆为研究对象并以秸秆脱离刀齿时为运动的初始时刻。
由于是在线跟踪拍摄,图像视角确定,且像素坐标一致,测量实际尺寸为W的标定尺对应图片的像素个数N,得到尺寸比例系数k=W/N,由此可以计算出实际秸秆在空间坐标系中位移随时间的变化,并可绘制出秸秆的运动轨迹[23-24]。
3.5 试验结果与分析
试验结果如表2所示。A、B、C为因素编码值。
对试验结果进行分析,修正系数k1~k4的二次项模型(2FI)有意义(P<0.001),进行F检验,剔除不显著项后,得到修正系数回归模型分别为
k1=2.712-1.024×10-2n+0.196δ1+0.079 2v1-
4.25×10-4nδ1+1.508×10-5n2
(20)
k2=5.058-0.02n+0.235δ1+0.205v1-
5.475×10-4nδ1+2.336×10-5n2
(21)
k3=0.308+6.338×10-3n+0.302δ1+
0.137v1-6.75×10-4nδ1
(22)
k4=33.636-0.031n-0.12δ1-2.272v1+
5.402×10-3nv1
(23)
对式(20)~(23)进行方差分析,结果如表3所示。由表可知,每个指标拟合项F1
4 模型应用
在清秸刀齿回转平面内秸秆回收装置与清秸装置的配合如图5所示,由清秸装置抛撒出机组侧向的秸秆与土壤呈层状分布,因此根据秸秆侧向抛出的运动轨迹,合理确定秸秆回收装置的安装位置,即可实现被清秸装置以一定初始速度抛出的秸秆直接由秸秆入口进入秸秆回收装置内,无需额外输送装置,充分利用了秸秆的机械能,降低了在秸秆回收过程中的能量消耗。
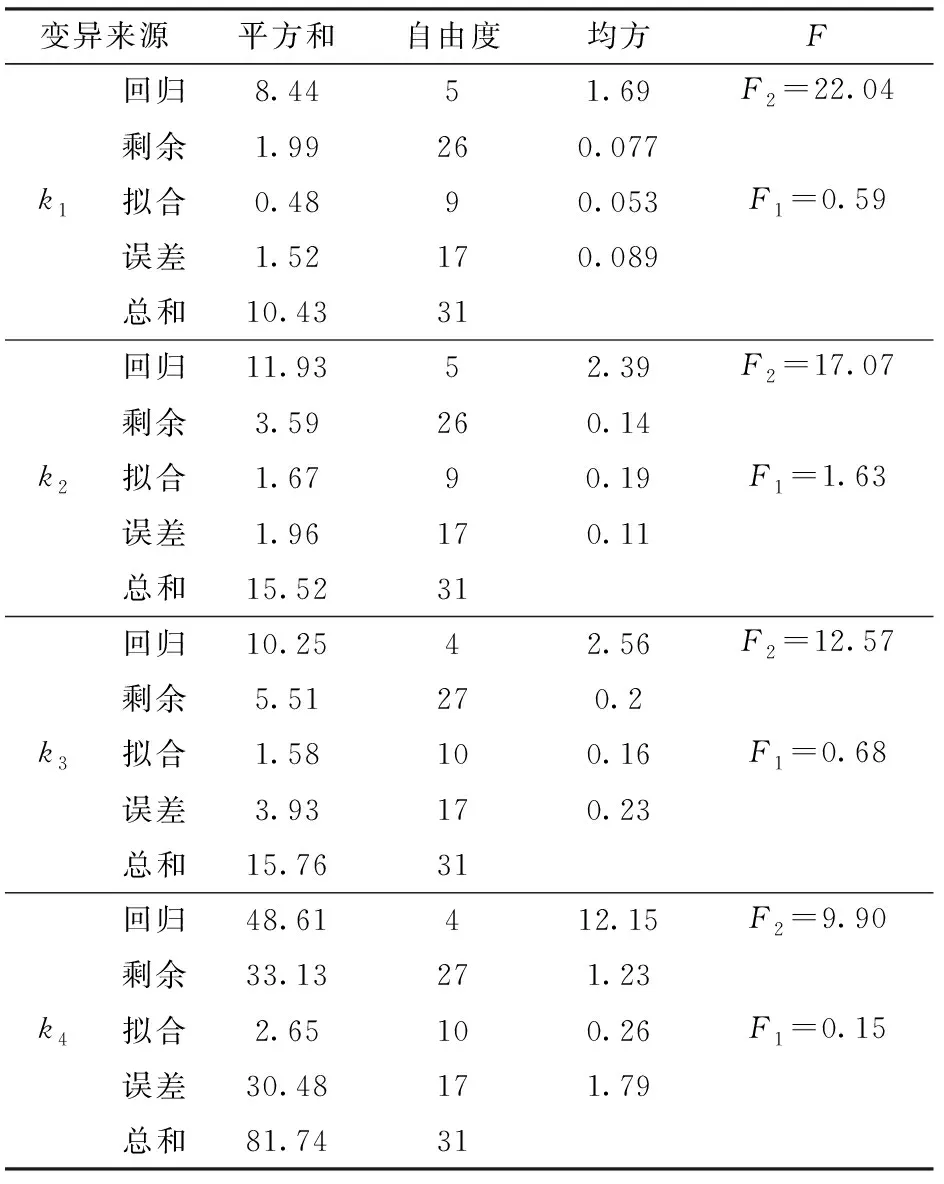
表3 回归模型方差分析Tab.3 Variance analysis of regression model
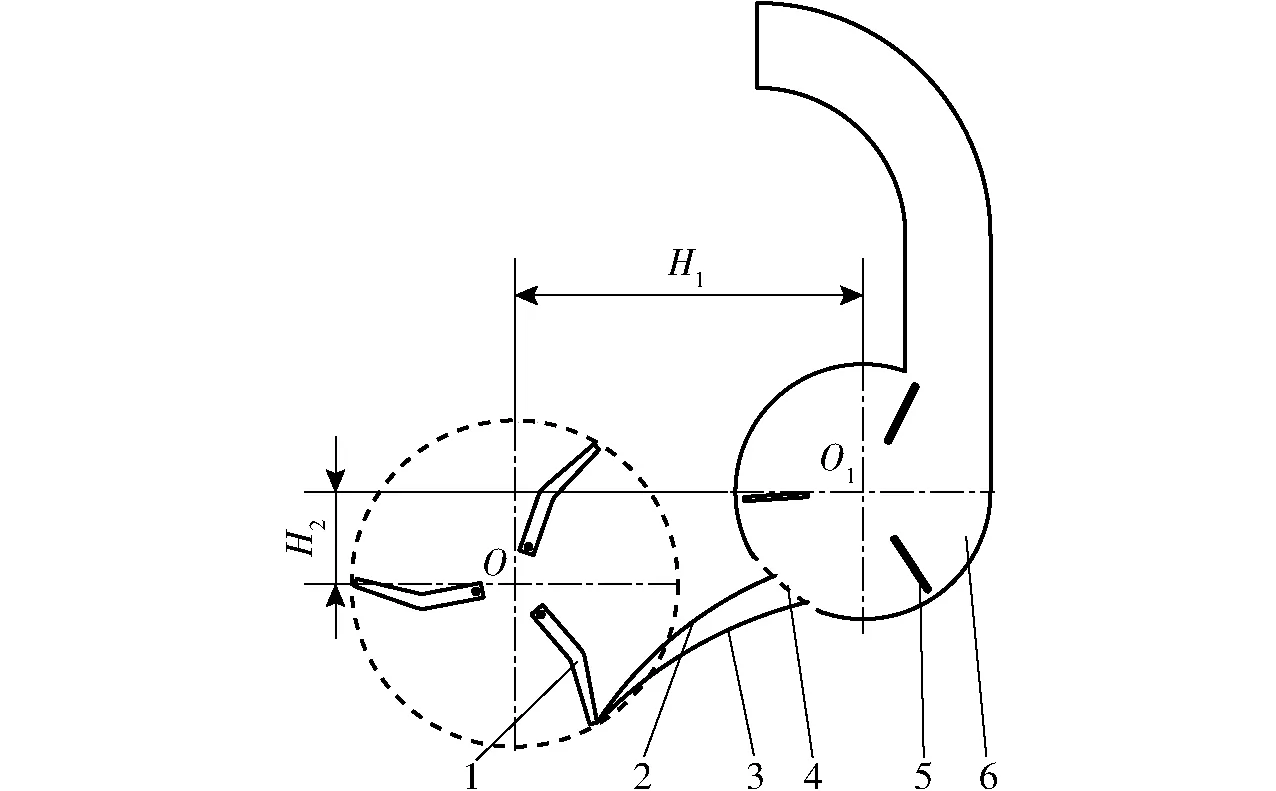
图5 秸秆回收装置定位示意图Fig.5 Schematic diagram of straw recycling device1.清秸刀齿 2.抛出秸秆上界线 3.秸秆土壤分界线 4.秸秆入口 5.叶片 6.秸秆回收装置
秸秆回收装置安装位置由秸秆回收装置叶轮回转中心O1相对于清秸刀齿回转中心O水平距离H1和竖直距离H2确定。在保证清秸装置与秸秆回收装置不干涉的基础上,为减少机具的横向尺寸,保证机具运输的机动性,同时为尽可能充分利用秸秆的机械能,避免秸秆在空中运动时造成机械能不必要的损失,根据秸秆侧向抛出的运动轨迹及秸秆入口的位置确定的H1应尽可能小,同时确定的H2应避免秸秆回收装置与土壤发生干涉。H1和H2的计算流程如图6所示。
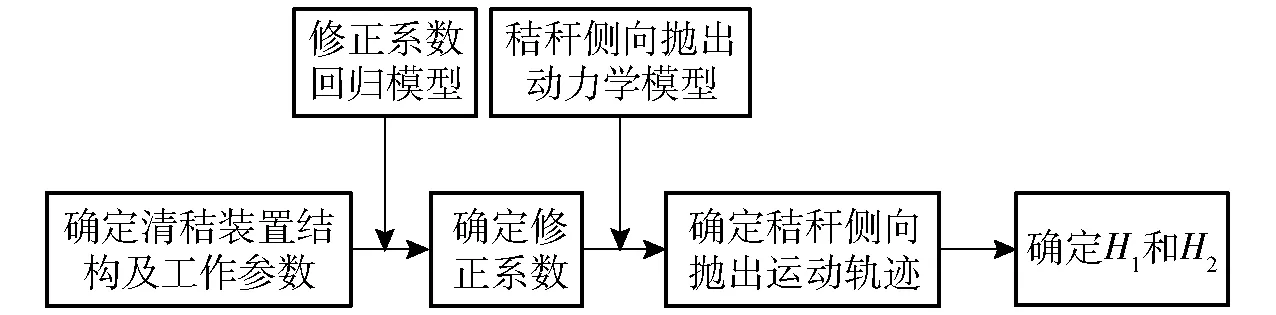
图6 计算流程图Fig.6 Calculation flow chart
清秸刀齿倾角为-10°,刀齿转速为450 r/min,机组前进速度为6 km/h时,根据计算流程,计算可得k1~k4分别为1.59、2.13、4.00、21.84,H1、H2分别为660 mm和340 mm。
5 田间试验
5.1 试验条件
根据计算所得的H1、H2将秸秆回收装置与清秸装置进行匹配,并参照国家相关行业标准NY/T 2463—2013和NY/T 991—2006对秸秆回收质量进行试验。
试验于东北农业大学校内试验田进行,如图7所示。试验地为人工收获后的玉米原茬地,秸秆覆盖量为2.73 kg/m2,平均直径23.6 mm,平均长度为741.7 mm。

图7 田间试验Fig.7 Field test
5.2 试验结果与分析
机器在正常作业状态下工作,测试内容包括秸秆回收率和不清洁度。每次测试段长度为10 m,重复测量5次,取其均值作为试验结果。
秸秆回收率为
(23)
式中S——秸秆回收率,%
Gj——秸秆未回收质量,kg
Gk——秸秆回收质量,kg
不清洁度为
(24)
式中Sb——不清洁度,%
Gb——杂物质量,kg
与清秸装置匹配的秸秆回收装置能将被清秸装置侧向抛出的秸秆顺利回收,测试结果如表4所示,秸秆回收率为91.21%,不清洁度为6.08%。
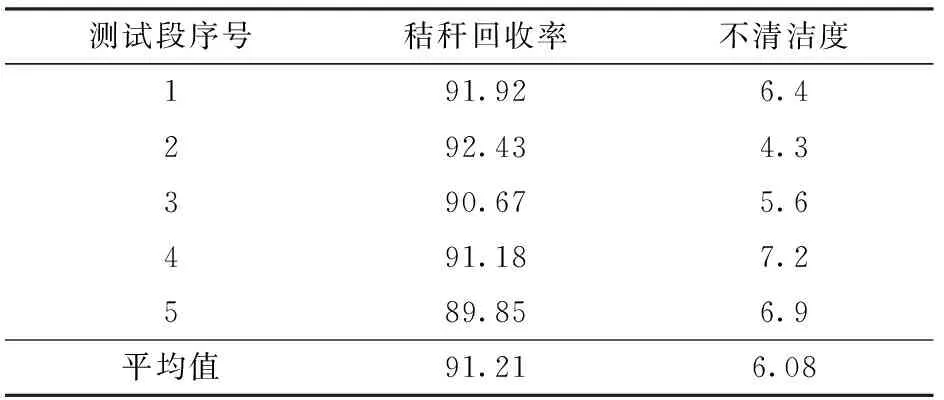
表4 测试结果Tab.4 Test result %
6 结论
(1)建立了含有修正系数的动力学模型,并求解出人工收获后玉米秸秆侧向抛出空间运动轨迹的参数化方程。
(2)在秸秆覆盖量2.08 kg/m2、土壤硬度27.4 kg/cm2、土壤含水率31.9%的人工收获玉米原茬地,清秸刀齿入土深度为50 mm的条件下,得到了修正系数k1~k4关于刀齿转速、刀刃倾角和机组前进速度的回归模型,各修正系数回归模型在信度α=0.05下均显著。
(3)与清秸装置匹配的秸秆回收装置的平均秸秆回收率为91.21%,不清洁度为6.08%。
1 陈海涛,查韶辉,顿国强,等. 2BMFJ系列免耕精量播种机清秸装置优化与试验[J/OL]. 农业机械学报, 2016, 47(7): 96-102. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160714&flag=1. DOI:10.6041/j.issn.1000-1298.2016.07.014.
CHEN Haitao, ZHA Shaohui, DUN Guoqiang, et al. Optimization and experiment of cleaning device of 2BMFJ type no-till precision planter[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 96-102. (in Chinese)
2 王汉羊,陈海涛,纪文义. 麦茬地免耕播种机清秸覆秸装置设计与试验(英文)[J]. 农业工程学报, 2012, 28(增刊2): 7-12.
WANG Hanyang, CHEN Haitao, JI Wenyi. Design and experiment of cleaning and covering mechanism for no-till seeder in wheat stubble fields[J]. Transactions of the CSAE, 2012, 28(Supp.2): 7-12.(in Chinese)
3 顿国强,陈海涛,李昂,等. 刀齿排布旋向对免耕覆秸精播机清秸单体性能的影响[J]. 农业工程学报, 2015, 31(12): 48-56.
DUN Guoqiang, CHEN Haitao, LI Ang, et al. Effect of rotation direction of knife teeth configuration on clearing straw unit performance for no-tillage and straw mulching precision seeder[J]. Transactions of the CSAE, 2015, 31(12): 48-56. (in Chinese)
4 吴广伟,陈海涛,纪文义,等. 2BMFJ- 3型茬地大豆免耕覆秸精量播种机功耗与油耗特性试验[J]. 大豆科学, 2014, 33(4): 589-593.
WU Guangwei, CHEN Haitao, JI Wenyi, et al. Power and fuel consumption of 2BMFJ- 3 no-tillage soybean precision seeder in stubble field[J]. Soybean Science, 2014, 33(4): 589-593. (in Chinese)
5 王汉羊,陈海涛,纪文义. 2BMFJ- 3型麦茬地免耕精播机防堵装置[J/OL]. 农业机械学报, 2013, 44(4): 64-70. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130412&flag=1. DOI:10.6041/j.issn.1000-1298.2013.04.012.
WANG Hanyang, CHEN Haitao, JI Wenyi. Anti-blocking mechanism of type 2BMFJ- 3 no-till precision planter for wheat stubble fields[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 64-70. (in Chinese)
6 王汉羊.2BMFJ- 3型麦茬地免耕覆秸大豆精密播种机的研究[D].哈尔滨:东北农业大学,2013.
WANG Hanyang. Study on 2BMFJ- 3 type no-till soybean precision planter with straw-covering in wheat stubble fields[D].Harbin:Northeast Agricultural University,2013.(in Chinese)
7 汪可欣,付强,张中昊,等. 秸秆覆盖与表土耕作对东北黑土根区土壤环境的影响[J/OL]. 农业机械学报, 2016, 47(3): 131-137. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160319&flag=1. DOI:10.6041/j.issn.1000-1298.2016.03.019.
WANG Kexin, FU Qiang, ZHANG Zhonghao,et al. Effects of straw mulching mode and tillage methods on soil environment of root zone in northeast black soil[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 131-137. (in Chinese)
8 贾洪雷,马成林,李慧珍,等. 基于美国保护性耕作分析的东北黑土区耕地保护[J]. 农业机械学报, 2010, 41(10): 28-34.
JIA Honglei, MA Chenglin, LI Huizhen, et al. Tillage soil protection of black soil zone in northeast of China based on analysis of conservation tillage in the United States [J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(10): 28-34. (in Chinese)
9 汪可欣,付强,姜辛,等. 秸秆覆盖模式对玉米生理指标及水分利用效率的影响[J/OL]. 农业机械学报, 2014, 45(12): 181-186. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20141227&flag=1. DOI:10.6041/j.issn.1000-1298.2014.12.027.
WANG Kexin, FU Qiang, JIANG Xin, et al. Effect of straw mulching mode on maize physiological index and water use efficiency[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(12) : 181-186. (in Chinese)
10 蔡丽君,张敬涛,盖志佳,等. 免耕条件下秸秆还田量对土壤酶活性的影响[J]. 土壤通报, 2015, 46(5): 1127-1132.
CAI Lijun, ZHANG Jingtao, GAI Zhijia, et al. Effect of the amount of stalk return to field on soil enzyme activities under no-tillage[J].Chinese Journal of Soil Science,2015,46(5): 1127-1132. (in Chinese)
11 蔡丽君,张敬涛,刘婧琦,等. 玉米- 大豆免耕轮作体系玉米秸秆还田量对土壤养分和大豆产量的影响[J]. 作物杂志, 2015(5): 107-110.
CAI Lijun, ZHANG Jingtao, LIU Jingqi, et al. Effects of corn stalk amount returning to field on the soil nutrient and soybean yields under alternate-year no-till corn-soybean rotation[J].Crops, 2015(5): 107-110. (in Chinese)
12 DENNIS L. Determination of the air and crop flow behavior in the bowing unit and spout of a pull-type-forage harvester[D]. Saskatoon: Saskatchewan University of Saskatchewan, 2005.
13 CHATTOPADHYAY P S, PANDEY K P. Impact cutting behavior of sorghum stalk using a flail-cutter—a mathematical model and its experimental verification[J]. Journal of Agriculture Engineering Research, 2001, 78(4):369-376.
14 LISOWSKI A, SWIATEK K, KLONOWSKI J, et al. Movement of chopped material in the discharge spout of forage harvester with a flywheel chopping unit: measurements using maize and numerical simulation[J]. Biosystems Engineering, 2012, 111(4): 381-391.
15 SHINNERS K J, KOEGEL R G, PRITZL P J, et al. Band lubrication to reduce friction loss in forage blowers[J]. Transactions of the ASAE, 1991, 34(5): 1962-1966.
16 SHINNERS K J, STELZLE M, KOEGEL R G. Improving the throwing effectiveness of an upward-cutting forage harvester [J]. Transactions of the ASAE, 1994, 37(4): 1059-1067.
17 CHATTOPADHYAY P S, PANDEY P S. Influence of knife configuration and tip speed on conveyance in flail forage harvesting[J]. Agricultural Engineering Research, 2001,78(3): 245-252.
18 胡瑞谦. 质点在绕水平轴等速旋转平面型叶片上运动的分析[J]. 农业机械学报, 1980, 11(4): 62-72.
HU Ruiqian. The motive analysis of particle which is on the blade of plane type, the blade rotate round a horizontal axle with constant angular velocity[J]. Transactions of the Chinese Society for Agricultural Machinery, 1980,11(4): 62-72. (in Chinese)
19 贾洪雷,王增辉,马成林,等. 玉米秸秆切碎抛送装置的试验研究[J]. 农业机械学报, 2003, 34(6): 96-99.
JIA Honglei, WANG Zenghui, MA Chenglin, et al. Chopping and throwing mechanism of corn straw[J]. Transactions of the Chinese Society for Agricultural Machinery, 2003, 34(6): 96-99. (in Chinese)
20 贾洪雷,马成林. 曲面直刃刀切碎与抛送变量的研究[J]. 农业机械学报, 2002, 33(6): 41-43.
JIA Honglei, MA Chenglin. Study on chopping and throwing parameters of the chopping knife with curved surface and straight edge[J]. Transactions of the Chinese Society for Agricultural Machinery, 2002, 33(6): 41-43. (in Chinese)
21 翟之平,吴雅梅,王春光. 物料沿抛送叶片的运动仿真与高速摄像分析[J]. 农业工程学报, 2012, 28(2): 23-28.
ZHAI Zhiping, WU Yamei, WANG Chunguang. Dynamic simulation and high-speed camera analysis on materials moving along throwing impellers[J]. Transactions of the CSAE, 2012, 28(2): 23-28. (in Chinese)
22 万其号,王德成,王光辉,等. 自走式牧草青贮联合装袋机设计与试验[J]. 农业工程学报, 2014, 30(19): 30-37.
WAN Qihao, WANG Decheng, WANG Guanghui, et al. Design and experiment of self-propelled grass silage combined bagging machine[J]. Transactions of the CSAE, 2014, 30(19): 30-37. (in Chinese)
23 崔涛,刘佳,杨丽,等. 基于高速摄像的玉米种子滚动摩擦特性试验与仿真[J]. 农业工程学报, 2013, 29(15): 34-41.
CUI Tao, LIU Jia, YANG Li, et al. Experiment and simulation of rolling friction characteristic of corn seed based on high-speed photography[J]. Transactions of the CSAE, 2013, 29(15): 34-41. (in Chinese)
24 任文涛,董滨,崔红光,等. 水稻种子与斜面碰撞后运动规律的试验[J]. 农业工程学报, 2009, 25(7): 103-107.
REN Wentao, DONG Bin, CUI Hongguang, et al. Experiment on the motion characteristics of rice seeds after collision with different slopes[J]. Transactions of the CSAE, 2009,25(7): 103-107. (in Chinese)
猜你喜欢
船舶职业教育(2023年6期)2023-12-02 14:54:44
——分清“主”和“次”
小学生优秀作文(高年级)(2023年4期)2023-05-09 02:18:54
中国化肥信息(2020年2期)2020-11-14 09:14:22
今日农业(2020年19期)2020-11-06 09:29:40
机械设计与制造工程(2020年3期)2020-04-27 05:46:38
当代陕西(2019年16期)2019-09-25 07:28:28
中国资源综合利用(2017年4期)2018-01-22 02:46:42
中国港湾建设(2017年11期)2017-12-19 12:27:10
统计科学与实践(2016年4期)2016-03-01 02:55:58
安全(2015年7期)2016-01-19 06:19:39
