
海底采矿车斜坡越障通过性分析与仿真研究*
2018-05-29 13:38刘金辉孟兆磊
机械制造 2018年11期
□ 刘金辉□ 谷 炜□ 孟兆磊□ 姜 勇
1.北京科技大学机械工程学院 北京100083
2.北京科技大学东凌经济管理学院 北京100083
3.北京矿冶研究总院机械研究所 北京100160
深海矿产资源丰富,但深海复杂多变的地形环境是一个不确定的、非结构化环境,研制通过性好、越障和绕障性能强、安全性和可靠性高的海底采矿车是各国发展深海技术的核心关键[1-5]。笔者对所设计的海底采矿车斜坡越障通过性进行了详细分析,为我国海底采矿车及其它领域探测车的研制提供理论参考和技术支持,具有重要的学术意义和工程应用价值[6-8]。
1 基本结构
海底采矿车如图1所示,车的复合轮组机构如图2所示,三个车轮W1、W2、W3在油缸1和油缸2的伸缩辅助作用下可实现一定程度的空间结构变化,从而使整个机构兼有主、被动混合越障模式[9-10]。主动模式下可以越过高于轮胎半径的垂直障碍,跨过大于轮胎直径的壕沟;被动模式下可以爬30°坡,自适应普通海底地质环境行驶等。
2 斜坡越障力学建模分析
2.1 斜坡越障通过性力学建模分析
当海底采矿车自适应爬斜坡时,其力学模型如图3所示。
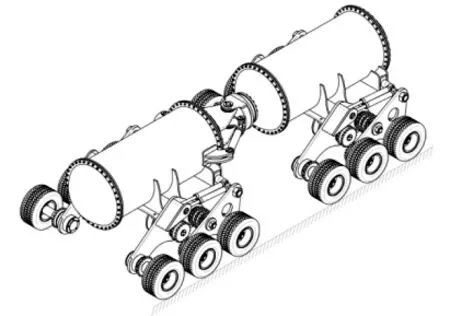
▲图1 海底采矿车
假设海底采矿车复合轮组的重力简化到各个车轮时为Gwi,则各车轮满足以下关系:
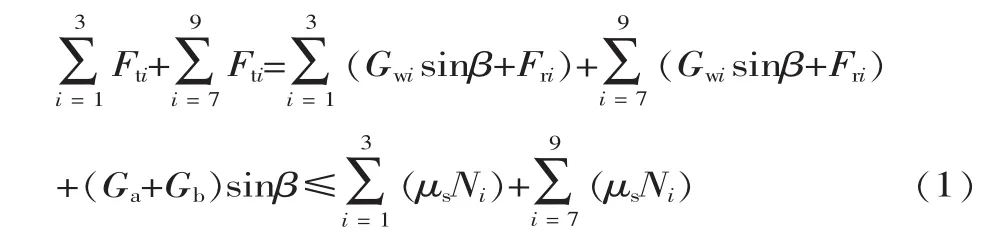
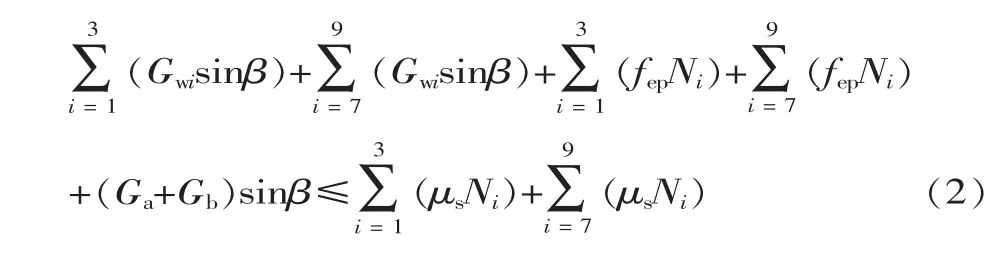
式中:Fti为各轮在驱动力矩Ti作用下与地面间的附着牵引力;Ni为各轮与地面间的法向支反力;β为移动系统爬行的坡面倾斜角;Fri为各轮的滚动阻力;μs为车轮与路面间的均一附着系数;Ga、Gb为前、后车体重力。
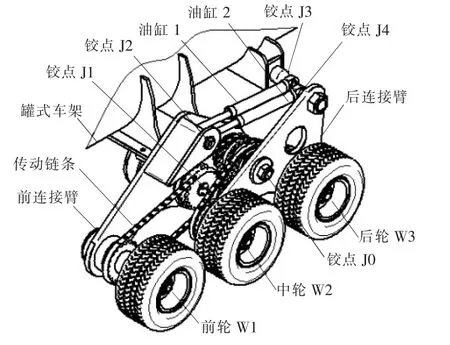
▲图2 复合轮组机构图
设fep为车轮滚动均一当量阻尼系数,则式(1)为:

取 μs=0.8、fep=0.2时,可求得 β≤30.96°。
2.2 斜坡越障倾覆失效力学建模分析
临界侧倾角是指海底采矿车侧倾而不倾覆的极限倾角,它是评定其单侧车轮同时越过障碍物最大高度的能力及其在倾斜路面的横向行驶能力的重要指标。
当海底采矿车自适应爬斜坡时,其倾覆失效模型如图4所示。
海底采矿车在倾斜角度为β的坡面上横向匀速行驶时,当β角达到一定的数值,海底采矿车将处于以下方车轮外侧为轴线的倾覆临界状态。此时,上方车轮支反力为零,虽然下方支撑车轮受到路面的支反力和摩擦力,但这些力都通过倾覆轴线,所以临界侧倾角βm的计算式为:

式中:G为海底采矿车总质量;W为海底采矿车宽度;hc为海底采矿车质心高度。
海底采矿车实际侧倾角满足β≤βm时,才不致倾覆。由式(6)可以看出,海底采矿车的质心高度越低,其临界侧倾角越大,但对质心高度要求过低,会对有效载荷的布置带来困难,设计时应综合考虑。
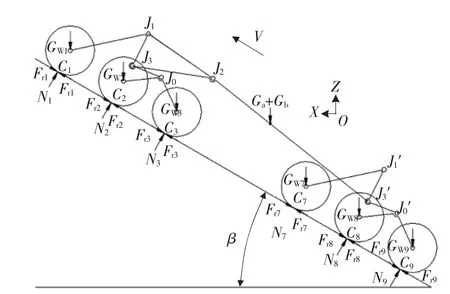
▲图3 海底采矿车斜坡越障力学模型
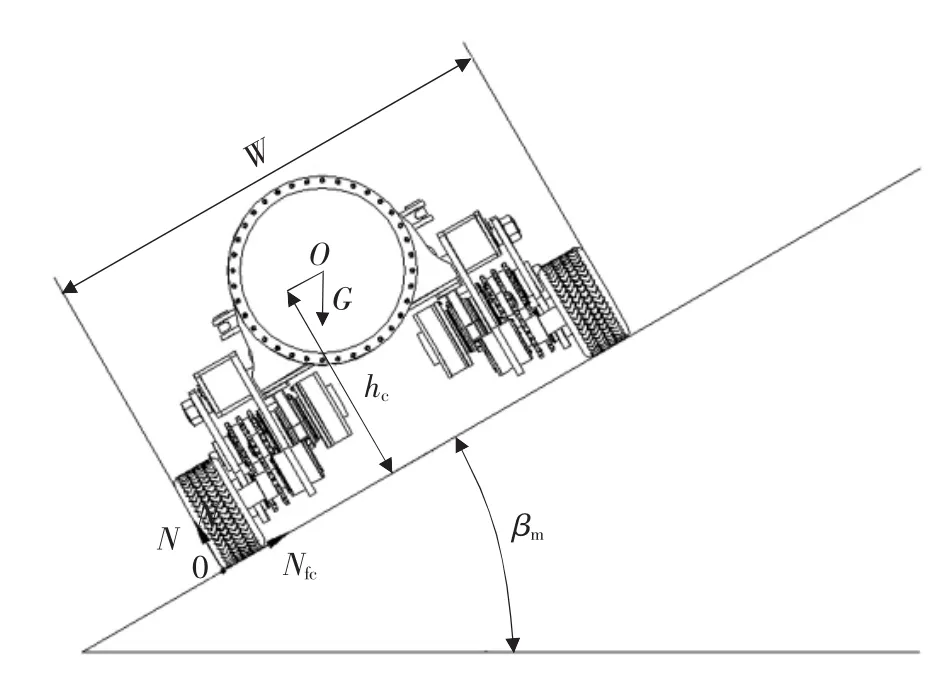
▲图4 海底采矿车倾覆失效模型
海底采矿车在侧倾角度为β的坡面上横向行驶时,还有可能发生侧滑,临界侧滑角βm′的计算式为:

式中:fc为车轮与地面间的侧向附着系数。
满足β≤βm′时,海底采矿车才不会侧滑。考虑到海底采矿车的安全性,宁愿侧滑也不倾覆,则应βm>βm′,得到:

3 斜坡越障仿真研究
3.1 30°斜坡越障仿真
海底采矿车的车轮直径为439 mm,每套轮组的轮距为550 mm,对其30°斜坡越障进行仿真分析,海底采矿车30°越障仿真过程如图5所示。
3.2 30°斜坡越障仿真结果分析
图6为海底采矿车左前复合轮组车轮运动曲线,图6(a)~图6(c)分别为海底采矿车左前复合轮组前轮、中轮、后轮各自质心的竖直位移、速度、加速度曲线。从曲线中可以看出,在30°斜坡越障过程中,前轮、中轮、后轮质心的位移、速度、加速度曲线变化趋势基本一致,下面对仿真曲线进行分析:
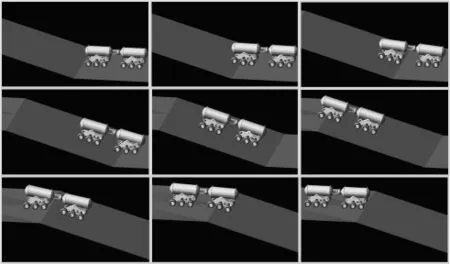
▲图5 海底采矿车30°斜坡越障仿真图
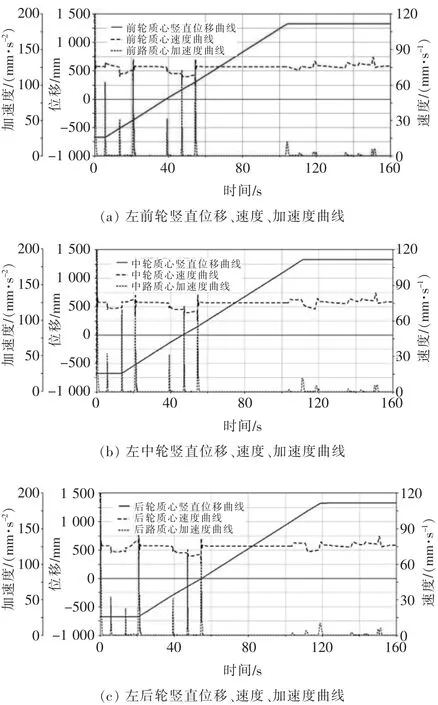
▲图6 海底采矿车左前复合轮组车轮运动曲线
(1)在0~5 s过程中,前轮组的前轮行驶至斜坡前开始爬坡,竖直位移保持不变,前轮速度从0增大后保持匀速不变;
(2)在5~20 s过程中,前轮组的前、中、后轮爬上斜坡,竖直位移随斜坡逐渐增大,前、中、后轮分别受到斜坡阻力作用,导致前轮速度有三处微小波动,基本保持匀速爬坡;
(3)在20~40 s过程中,前轮组在斜坡上行驶至后轮组的前轮开始爬坡,竖直位移随斜坡继续增大,前轮速度保持匀速爬坡;
(4)在40~55 s过程中,后轮组的前、中、后轮爬上斜坡,竖直位移随斜坡继续增大,后轮组的前、中、后轮分别受到斜坡阻力作用,导致前轮速度有三处微小波动,但基本保持匀速爬坡;
(5)在55~105 s过程中,整个行走机构在斜坡上行驶至前轮组的前轮上坡前,竖直位移随斜坡继续增大,前轮速度保持匀速爬坡;
(6)在105~120 s过程中,前轮组的前、中、后轮爬上斜坡,竖直位移上坡后保持不变,前轮组的前、中、后轮分别受到上斜坡阻力作用,导致前轮速度有三处微小波动,基本保持匀速爬坡;
(7)在120~135 s过程中,前轮组爬上斜坡平台至后轮组的前轮抵达斜坡平台前,竖直位移在斜坡平台上保持不变,前轮速度保持匀速爬坡;
(8)在135~160 s过程中,后轮组的前、中、后轮爬上斜坡平台,竖直位移在斜坡平台上保持不变,后轮组的前、中、后轮分别受到上斜坡平台阻力作用,导致前轮速度有三处微小波动,基本保持匀速爬坡,至此仿真结束。
图7为海底采矿车主车体运动曲线,图7(a)和图7(b)分别为海底采矿车车体中心的竖直位移、速度、加速度、角加速度曲线。从曲线中可以看出,车体中心的位移、速度加速度曲线反映出越障过程变化的趋势与前轮质心位移、速度、加速度的变化趋势基本一致。总体上变化比较平稳,仅在各车轮上下斜坡瞬间有微小的波动,验证了海底采矿车良好的稳定性和越障通过性。
图8为海底采矿车左前复合轮组车轮及铰点J受力分析曲线,图8(a)至图8(c)分别为海底采矿车左前复合轮组左前、中、后轮水平方向、垂直方向受力曲线及铰点J的受力曲线。从曲线中可以看出,在30°斜坡越障过程中,各轮受力大小基本相同,都出现在各车轮上下斜坡的过程,仿真结果表明海底采矿车具有良好爬坡能力和行驶稳定性。
4 结束语
笔者以复合式海底采矿车为研究对象,对30°斜坡越障通过性进行分析和仿真,获得了海底采矿车的动力学特性曲线,为海底采矿车的研制及测试验证提供参考。
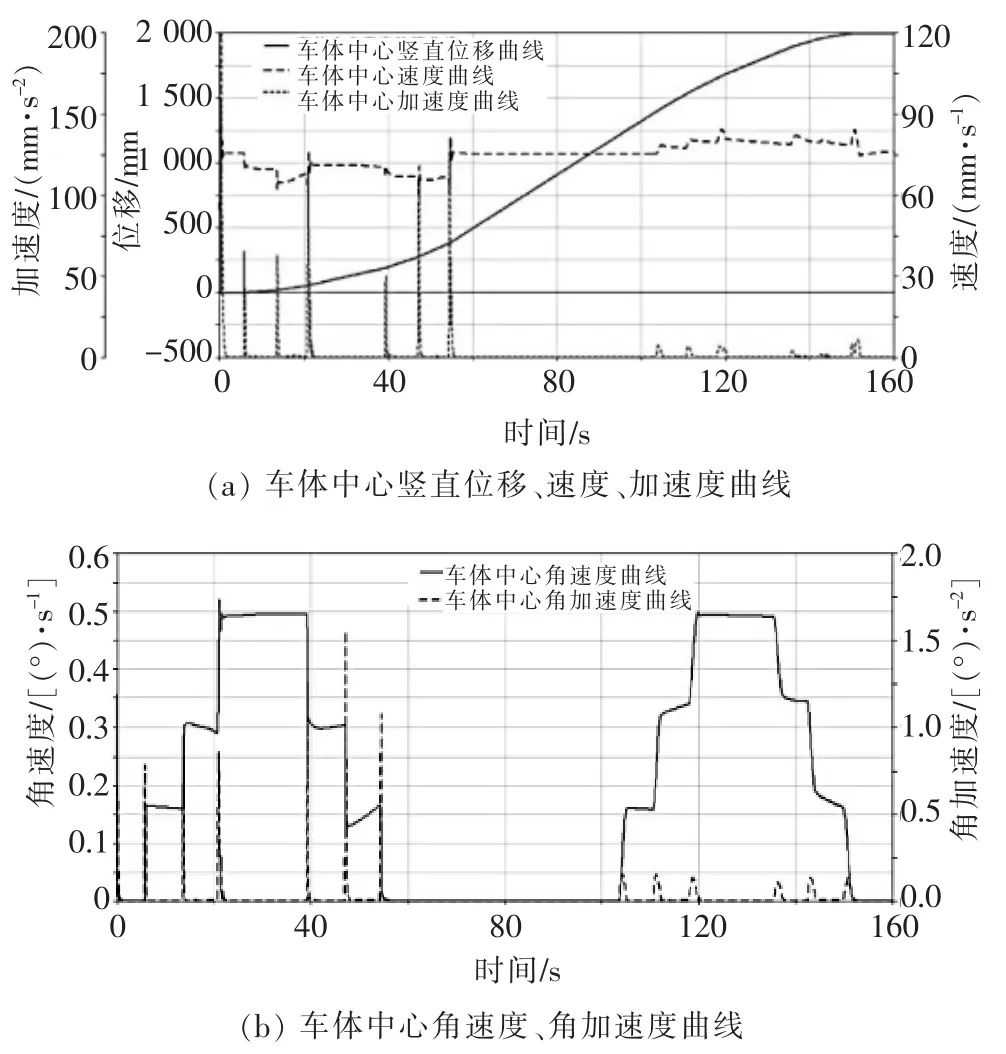
▲图7 海底采矿车主车体运动曲线
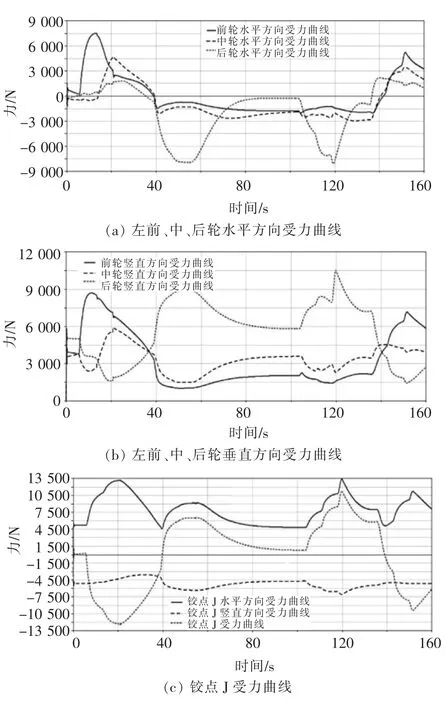
▲图8 左前复合轮组车轮及铰点J受力分析曲线
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
当代陕西(2021年13期)2021-08-06
当代工人(2020年1期)2020-05-11
小学生学习指导·爆笑校园(2019年6期)2019-09-10
中国自行车(2018年9期)2018-10-13
中国自行车(2018年7期)2018-08-14
中国自行车(2018年7期)2018-08-14
中国自行车(2017年1期)2017-04-16
中国环境监察(2016年11期)2016-10-24
红蜻蜓·低年级(2015年11期)2016-02-02
