基于反馈线性化的高速无人机自适应控制系统设计
2018-05-26 02:20:03阮政委杨秦敏周文雅
宇航总体技术 2018年3期
阮政委,杨秦敏,周文雅
(1. 浙江大学控制科学与工程学院, 杭州 310027;2. 大连理工大学航空航天学院, 大连116024)
0 引言
无人机具有体积小、成本低、机动性高、对作战环境要求低、生存能力强等优点,在现代战争中发挥着极其重要的作用。无人机的飞行控制系统是无人机的中枢,是完成任务、安全飞行的保证,更是无人机研制的核心和关键技术之一。高速飞行的无人机具有复杂非线性、参数时变、通道强耦合等动力学特性,这对飞行控制系统设计提出了严峻挑战。
为了设计飞行控制系统,研究者们早期一般采用小扰动线性化理论对无人机动力学模型进行线性化[1-3]。当系统偏离平衡点时,系统特性往往不再遵循线性变化关系,而线性化模型只是其近似,这将造成较大的模型误差,无法满足高速无人机的性能指标要求。基于该线性化方法设计的控制系统也难以取得较好的控制效果。
在控制系统设计方面,基于经典的比例积分微分控制器PID(Proportion Integration Differentiation)设计方法[4-5]虽然在早期得到了较广泛应用,但随着无人机控制性能指标的不断提高,这种方法显现出以下不足:由于PID参数是根据固化被控对象设计的,当系统中存在时变参数时,PID参数无法根据系统参数变化自动调整,因而无法保证精确控制。为了提高无人机飞行控制性能,现代控制理论的一些方法的应用研究逐渐开展,如线性二次调节器LQR(Linear Quadratic Regulator)方法[6-7]。与此同时,得益于非线性控制理论的发展,研究人员探索了其在无人机飞行控制系统设计中的应用,如反步法控制[8-10]、滑模控制[11-13]等。但反步法控制和滑模控制存在着微分膨胀问题[14-15]和抖振问题[16-17],通过引入积分滤波器[18-19]和积分滑模控制[20-22]可以有效改善以上问题。近些年,一些基于智能控制的方法也在理论研究上取得了进展[23-25],但在无人机飞行控制系统设计应用中采用较少,原因在于智能控制方法算法复杂、计算量大、机载计算机执行时间过长,无法保证控制系统的时效性。
综上所述,模型线性化过程必须足够精确,其动态过程应该在被控模型中得以体现。控制律既要对系统参数时变和外界扰动具有强鲁棒性,又不能过于复杂,增加机载计算机计算量。因此,本文采用精确反馈线性化方法对无人机动力学模型进行线性化和解耦,并应用模型参考自适应控制方法完成了各通道控制律设计。
1 无人机动力学模型
设机体坐标系为Oxyz,x轴位于无人机的对称平面内,指向机头方向;y轴位于垂直于无人机的对称平面且指向机身右侧方向;z轴方向可根据右手定则确定。根据以上假设,建立无人机动力学方程如下
(1)
(2)
式中,γ、ϑ和ψ分别为滚转角、俯仰角和偏航角;p、q和r表示机体角速度在x、y、z轴上的分量,分别为滚转角速度、俯仰角速度和偏航角速度;L、M和N表示无人机所受合力矩在x、y、z轴上的分量,分别为滚转力矩、俯仰力矩和偏航力矩。
其中,Ix、Iy、Iz和Izx分别为对应机体轴的惯性矩和对Oz和Ox轴的惯性积;由于无人机具有对称面,惯性积Ixy=Izy=0。
滚转力矩、俯仰力矩和偏航力矩可以表示为:
(3)
上述无人机动力学方程表明该系统是一个MIMO非线性系统,且3个通道间存在强耦合作用。选择系统的3个姿态角作为系统输出,即
且令

则存在光滑向量场f(x)、g(x)和h(x),系统可以表示成状态空间形式为

(4)
y=h(x)
(5)
式中,
2 非线性动力学模型的反馈线性化
反馈线性化的思想是通过非线性反馈或动态补偿的方法使非线性系统转化为线性系统,然后再利用线性化系统理论对线性化后的系统设计控制器,以达到控制性能指标要求。
对非线性系统式(4)和式(5),系统的相对阶向量满足
κ1=κ2=κ3=2
(6)
系统的总相对阶为6,与系统维数相同,因此可进行原系统的输入状态线性化,且不存在内动态子系统,系统的渐近稳定和跟踪均能实现。设相对阶向量为κ=(κ1,κ2,κ3),则有式(7)成立:
(7)
式中,
其中,

Lfhi(x)、Lghi(x)分别为标量函数hi(x)对向量场f(x)和g(x)的李导数。由F(x)和E(x)可求得

由F1(x)、F2(x)和F3(x)可求得F(x)行列式的值为
(8)

u=F-1(x)[v-E(x)]
(9)

(10)
作如下状态变换,设新的状态量为
(11)
则系统的状态方程变为

(12)
系统的输出方程为
Y=CX
(13)
式中,
其中,i=1,2,3。
至此,实现了姿态控制系统的精确线性化,同时原系统被解耦为3个独立的2阶系统,即γ仅与v1有关、ϑ仅与v2有关、ψ仅与v3有关。
3 控制器设计
基于反馈线性化得到的3个独立通道,根据各个通道的控制性能指标要求,分别利用PID控制方法和模型参考自适应控制方法设计3个通道的控制器。
3.1 PID控制器
以解耦线性化后的俯仰通道为例,基于PID控制方法得到的控制律形式为:
(14)

同理,可设计滚转和偏航通道控制律。图1给出了PID方法实现无人机俯仰通道控制的框图。

图1 俯仰通道的PID控制Fig.1 PID control of pitch channel
假定无人机的飞行高度为:H=10 km,飞行速度为:Ma=1.5;初始条件分别为:γ=ϑ=ψ=2°,角速率p=q=r=0rad/s;控制约束为:-5°≤δa≤5°,-15°≤δe≤15°,-15°≤δr≤15°。
为了验证PID控制器的设计效果,设俯仰通道的参考输入为8°的阶跃信号,选取以下3种工况进行验证。工况1:理想飞行工况,即不存在参数摄动和外部干扰;工况2:气动力矩M由于燃料消耗、质心前移等因素而增大,其变化范围为0~30%;工况3:无人机受到恒值力矩干扰,其幅值为5000 N·m。图2给出了俯仰通道在上述3种工况下的姿态角响应曲线。
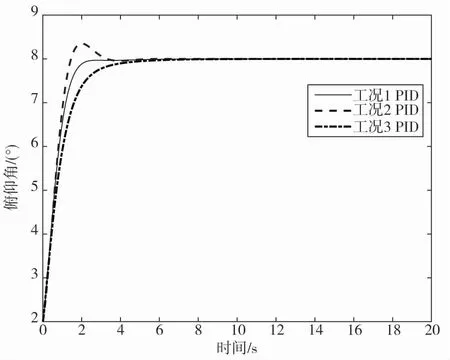
图2 俯仰通道响应Fig.2 Response of pitch channel
由图2可以看出,对于上述3种工况,基于PID控制律设计的俯仰通道均能实现稳定,但对于工况2和工况3,控制效果明显变差。对于工况2,俯仰角超调量变大,调节时间增长;对于工况3,俯仰角达到设定值的上升时间变长。
在PID控制律作用下,升降舵舵偏角变化曲线如图3所示。可见,3种工况下舵偏角初始阶段变化率极大,且初始瞬间舵偏角达到了负向饱和值(-15°),这对无人机飞行控制是极其不利的。
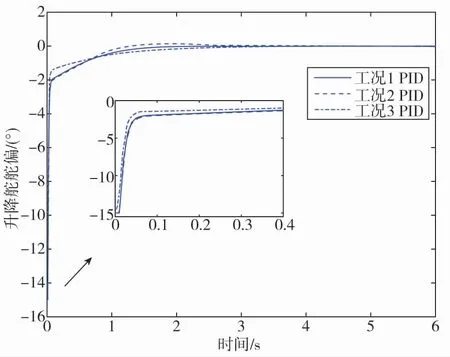
图3 升降舵舵偏角Fig.3 Elevator deflection angle
3.2 自适应控制器
为了更好地克服模型参数摄动和外部干扰带来的影响,采用模型参考自适应控制方法对解耦线性化后的滚转、俯仰和偏航通道进行控制器设计。
这里仍以俯仰通道为例设计自适应控制器, 选取参考模型为
(15)
其中,ym为参考模型输出,r为参考输入。根据无人机俯仰通道控制性能指标确定参考模型,即确定系数am0=bm=5.17,am1=6.05。
选择控制律形式为
(16)

并将其代入式(16)可得可调系统微分方程,即
(17)
利用式(15)减去式(17),可得误差方程为
(18)
式中,er为参考模型输出ym与被控对象输出yp的差,λ1=-(am1+f1),λ0=-(am0+f0),δ=bm-bp。
将式(18)写成状态空间形式为
(19)
设参数向量ϖ和广义误差向量ε分别为

令
式(19)又可写成
(20)
选取Lyapunov函数为
(21)
式中,P为2阶正定对称矩阵,Ω为3阶正定对角阵,即
(22)

(23)
选取正定对称矩阵Q使
PA+ATP=-Q
选取系数bp、f1和f0的自适应律为
(24)
其中,p12=2300,p22=2000;bp(0)=22.3,f1(0)=-124.5,f0(0)=-23.2;γ0=γ1=100,μ=0.1。图4给出了模型参考自适应控制系统框图。
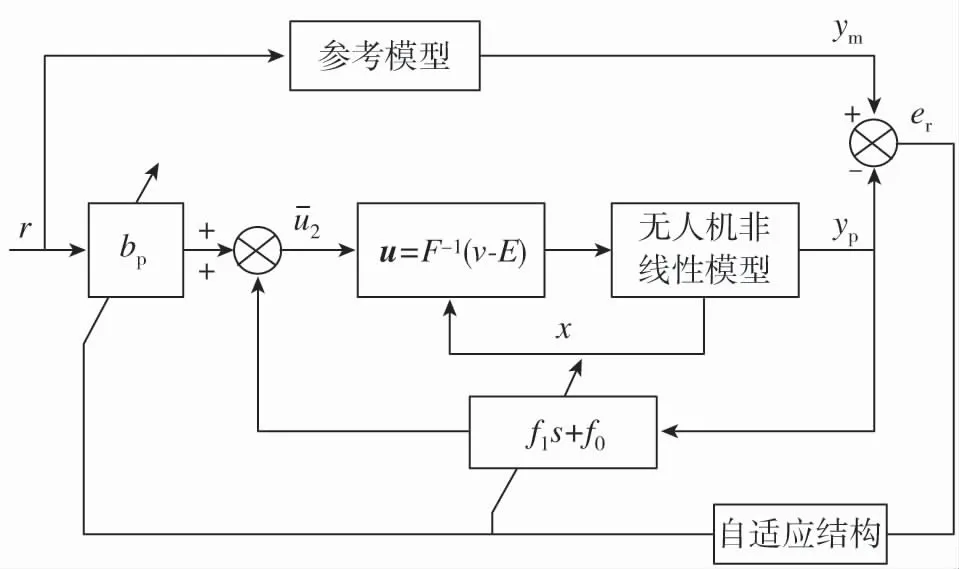
图4 模型参考自适应系统Fig.4 MRAC control

同样,仍以8°的阶跃信号作为俯仰通道的参考输入,基于3.1节中的3种工况,给出其姿态角响应曲线,如图5所示,并与PID控制系统的输出结果进行对比。
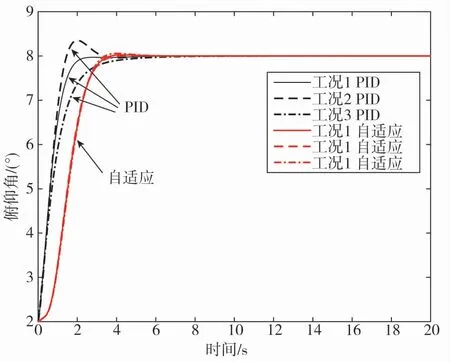
图5 两种控制器下俯仰通道响应Fig.5 Response of pitch channel under two controllers
由图5可知,对于上述3种工况,自适应控制下的俯仰角响应曲线几乎重合在一起。表明在自适应控制律下,系统对于参数摄动和外部扰动具有更强的鲁棒性,与PID控制系统相比表现出更好的控制性能。
图6给出了基于自适应控制器3种工况下的升降舵变化曲线,并与PID控制器下的结果进行对比。
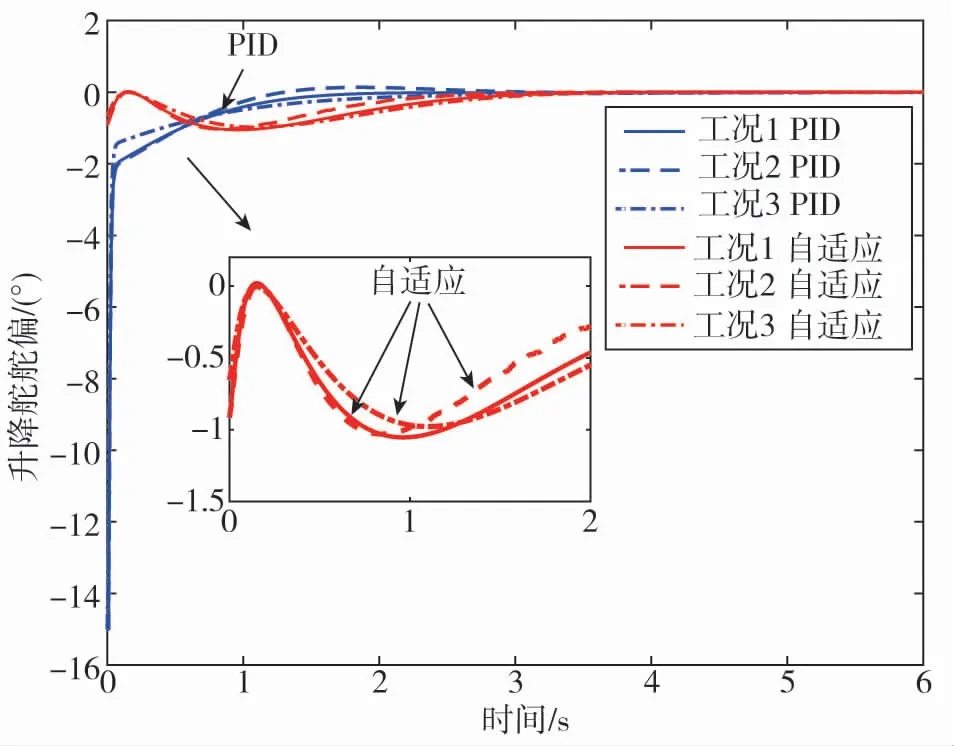
图6 两种控制器下的升降舵舵偏角Fig.6 Elevator deflection angle under two controllers
由图6可以看出,对于上述3种工况,与PID控制律下的舵偏角相比,自适应控制下的升降舵偏转角变化较为平缓,且没有达到舵偏饱和值,虽然参数摄动和外部干扰对舵偏角产生一定影响,但变化幅度较小,均处于理想的变化范围内。
4 结论
针对无人机非线性、参数时变、三通道强耦合的动力学特性,将精确反馈线性化方法和自适应控制方法相结合设计了无人机的飞行控制系统。研究表明,这种线性化方法能够实现三通道在形式上的完全解耦,且不会引入线性化带来的模型误差。自适应控制律比PID控制律在抑制参数摄动和外部扰动方面表现出更强的鲁棒性,而且算法简单,在实际应用中更有利于将其付诸实施。
参考文献
[1] Godbolt B, Vitzilaios N I, Lynch A F. Experimental validation of a helicopter autopilot design using model-based PID control[J]. Journal of Intelligent & Robotic Systems, 2013, 70(1-4): 385-399.
[2] Jiao Y, Du J, Wang X, et al.H∞state feedback control for UAV maneuver trajectory tracking[C]//Intelligent Control and Information Processing, Dalian, China, 2010: 253-257.
[3] 李远伟, 王常虹, 伊国兴, 等. 涵道式无人机鲁棒控制系统设计[J]. 电机与控制学报, 2010, 14(9): 81-87.
[4] 吴成富, 刘小齐, 袁旭. 四旋翼无人机建模及其 PID 控制律设计[J]. 电子设计工程, 2012, 20(16): 68-70.
[5] 汪洋亮, 王国胜, 李中良. 基于 PID 的高速无人机高度控制系统设计[J]. 舰船电子工程, 2009, 29 (2): 163-166.
[6] 段镇. 无人机鲁棒伺服 LQR 飞行控制律设计[J]. 计算机测量与控制, 2015, 23(8): 2713-2715.
[7] 朱熠, 陈欣, 李春涛, 等. 风扰动下的飞翼无人机静态投影控制[J]. 兵工学报, 2015, 36(7): 1237-1246.
[8] Nodland D, Zargarzadeh H, Jagannathan S. Neural network-based optimal adaptive output feedback control of a helicopter UAV[J]. IEEE Transactions on Neural Networks and Learning Systems, 2013, 24(7): 1061-1073.
[9] Cayero J, Morcego B, Nejjari F.Modelling and adaptive backstepping control for TX-1570 UAV path tracking[J]. Aerospace Science and Technology, 2014, 39: 342-351.
[10] 冯引安, 祝小平, 周洲. 弹性飞翼无人机鲁棒姿态控制设计[J]. 飞行力学, 2017, 35(3): 60-63.
[11] 刘海波, 王和平, 沈立顶. QTR无人机垂直起降模态分数阶滑模姿态控制[J]. 系统工程与电子技术, 2017, 39(1): 156-161.
[12] Lee D, Kim H J, Sastry S. Feedback linearization vs. adaptive sliding mode control for a quad-rotor helicopter[J]. International Journal of Control, Automation and Systems, 2009, 7(3): 419-428.
[13] Espinoza T, Dzul A E, Lozano R, et al. Backstepping-sliding mode controllers applied to a fixed-wing UAV[J]. Journal of Intelligent & Robotic Systems, 2014, 73(1-4): 67-79.
[14] Lee T, Kim Y. Nonlinear adaptive flight control using backstepping and neural networks controller[J]. Journal of Guidance, Control, and Dynamics, 2001, 24(4): 675-682.
[15] 李俊, 徐德民, 宋保维, 等. 非匹配不确定非线性系统的反演变结构控制[J]. 西北工业大学学报, 2004, 22(2): 145-148.
[16] 陈金辉, 潘佳笛, 王伟. 四旋翼无人机速度控制系统设计[J]. 计算机测量与控制, 2015, 23(6): 1940-1943.
[17] Gao Z, Jiang B, Shi P, et al. Active fault tolerant control design for reusable launch vehicle using adaptive sliding mode technique[J]. Journal of the Franklin Institute, 2012, 349(4): 1543-1560.
[18] Dong W, Farrell J A, Polycarpou M M, et al. Command filtered adaptive backstepping[J]. IEEE Transactions on Control Systems Technology, 2012, 20(3): 566-580.
[19] 钱默抒, 姜斌, 许德智, 等. 无人机姿控系统鲁棒动态面容错控制设计[J]. 系统工程与电子技术, 2014, 36(9): 1798-1803.
[20] Efe M Ö. Integral sliding mode control of a quad-rotor with fractional order reaching dynamics[J]. Transactions of the Institute of Measurement and Control, 2011, 33(8): 985-1003.
[21] 郑峰婴, 龚华军, 甄子洋. 基于积分滑模控制的无人机自动着舰系统[J]. 系统工程与电子技术, 2015, 37(7): 1621-1628.
[22] 谭健, 周洲, 祝小平, 等. 飞翼布局无人机分数阶积分滑模姿态控制[J]. 控制理论与应用, 2015, 32(5): 607-614.
[23] Gomez J F, Jamshidi M. Fuzzy adaptive control for a UAV[J]. Journal of Intelligent & Robotic Systems, 2011, 62(2): 271-293.
[24] Yadav A K, Gaur P. AI-based adaptive control and design of autopilot system for nonlinear UAV[J]. Sadhana, 2014, 39(4): 765-783.
[25] 张浩楠, 鲜斌. 基于神经网络的小型无人直升机非线性鲁棒控制设计[J]. 控制与决策, doi: 10.13195/kzyjc.2017.0350 j.kzyjc.2017.0350.
猜你喜欢
中等数学(2020年2期)2020-08-24 07:58:46
测控技术(2018年9期)2018-11-25 07:44:24
电子测试(2018年15期)2018-09-26 06:01:04
山东青年(2016年12期)2017-03-02 18:22:48
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
光学精密工程(2016年6期)2016-11-07 09:08:02
光学精密工程(2016年3期)2016-11-07 09:03:32
航天制造技术(2016年6期)2016-05-09 08:32:51
自动化学报(2016年8期)2016-04-16 03:38:51
西北工业大学学报(2015年1期)2016-01-19 03:29:56