微创手术机器人丝传动器械的夹持力补偿模型
2018-05-18 05:42苏赫,孔康
天津大学学报(自然科学与工程技术版) 2018年5期
苏 赫,孔 康
(1. 南开大学计算机与控制工程学院,天津 300071;2. 天津大学机械工程学院,天津 300350)
微创手术是指通过内窥镜等现代医疗设备和器械进行的手术.在微创手术中,医生通过在患者体表开设的若干微小切口将细长的手术器械探入患者体内,并借助内窥镜装置提供的术野图像来实施手术操作.相比开口手术方式,微创手术可以有效减少手术创伤,降低手术安全风险,缩短术后恢复时间[1].然而,它在为患者带来诸多益处的同时,却增加了医生的手术操作难度.由于存在手术切口的约束限制而导致操作难度增加,其主要原因包括:①器械灵活性降低;②医生操作中的眼手不协调;③医生的手部抖动会在器械末端被放大.这些限制因素使得微创手术技术仅能在简单的微创手术环境中得到应用.
为突破固有的切口约束限制,融合微创手术技术与机器人技术的微创手术机器人应运而生.机器人辅助微创手术具有以下几个方面的优势:①增强运动灵活性;②动作稳定、连续;③具有三维立体视觉,能够实现眼手协调运动[2].这些优势促使越来越多的学者与研究机构致力于微创手术机器人的研究工作,Zeus微创机器人系统[3]、Raven微创机器人系统[4]以及da Vinci微创机器人系统[5-6]等相继面世.其中,da Vinci机器人是目前技术最为成熟、商业化水平最高的微创手术机器人系统.
手术器械是微创手术机器人的末端执行单元.由于结构尺寸要求严格,微创机器人手术器械多采用丝传动方式实现.UCB/UCSF RTW 机器人丝传动器械[7]具备3自由度,并通过钢丝绳将布置在后端的电机动力传递至器械末端各自由度;da Vinci 微创机器人手术器械 EndoWrist系列[8-9]及MicroHand微创机器人丝传动器械[10]均具有 4自由度,使机器人系统具备体内全维空间运动能力;Robin Heart 微创机器人丝传动器械[11]采用 5自由度冗余构型,然而冗余自由度的引入也极大地增加了机器人控制难度.
手术器械输出力控制对手术操作质量、安全性、可靠性等方面都有重要作用.在现有的已商业化的手术机器人系统中,尚未将力控制引入到控制当中.已商业化的da Vinci微创机器人系统通过视觉反馈操作[12],器械夹持力输出通过视觉反馈并凭医生经验进行判断.但在进行复杂动作时,存在夹持力输出不稳定的可能,这成为微创机器人的安全隐患.Cundy等[13]提出了一种基于操作经验的夹持力补偿方法,这种方法有利于减少因夹持力输出不稳定造成的组织损伤,但是这对医生手术操作经验的要求非常高;Lee等[14]提出了一种用于稳定夹持力输出的一阶线性预测模型,但该线性模型无法在全姿态下准确反映夹持力的复杂变化情况.为解决上述问题,实现夹持力的稳定输出,本文对器械夹持力的预补偿建模方法展开研究.
本文以实验室开发的“妙手 S”微创机器人 4自由度丝传动手术器械为研究对象.在系统地阐述所提出的器械夹持力预补偿建模方法与建模流程的基础上,对“妙手 S”微创机器人手术器械进行实例建模,并通过单元性能测试以及结合整机系统的动物实验,有效地验证了所提出的微创手术机器人丝传动器械夹持力预补偿建模方法的可行性.
1 夹持力预补偿建模方法
1.1 夹持力预估
建模原理为通过构建输入量(器械姿态)与输出量(夹持力)之间的映射函数作为器械的夹持力预估模型,如图 1所示.当器械末端姿态信息通过主从运动映射获得后,利用所构建的夹持力预估模型可得器械在相应姿态下的理想夹持力输出值,从而为实现器械夹持力输出补偿提供数值依据.夹持力预估模型以器械腕部关节角度值α、β、γ或对应的接口转角值φ1、φ2、φ3为输入变量,以夹持力值为输出变量.其中,腕部关节角度α、β、γ可以合写为(α,β,γ);接口转角值φ1、φ2、φ3可以合写为(φ1,φ2,φ3).

图1 器械夹持力预估建模原理Fig.1 Modeling principle of the clamping force prediction for instrument
考虑到在微创机器人手术器械的“姿态-夹持力”关系研究中,腕部关节角度值(α,β,γ)对研究者更为直观形象,因此,本文选择(α,β,)γ作为构建器械预估模型的输入变量.
为定量分析输入与输出变量之间的关系,构建微创器械的夹持力初始预估模型为

式中:a0表示方程的零次项;a1~a3表示方程的 1次项系数;a4~a6表示方程的 2次项系数;b表示方程的高次及耦合项.
需要指出的是,考虑到1阶线性模型无法反映夹持力输出变化的复杂性,高阶的复杂模型则因待求解系数较多而使得数据采集与计算量较大,本文优先考虑建立2阶的夹持力预估模型,即先忽略原模型中的高次及耦合项b,当得到的2阶夹持力预估模型无法满足器械的夹持力输出要求时,再考虑求解高次及耦合项b.
由此,式(1)简化后的夹持力预估模型为

由于式(2)中包含有 7个未知系数,因此,需要获得至少 7组输入-输出变量数据组样本来求解模型中的未知系数.
接下来,首先需要通过样本采集,得到器械各姿态下的关节角(α,β,γ)数据,并测得每种姿态下对应的夹持力FC输出数据.为对模型未知系数进行计算与验证,选取i( i≥7)种的典型腕部姿态作为研究与测量对象,并得到每种姿态下的夹持力数据.从所有的i数据组中任意选取 7组“姿态-夹持力”数据对来求解初始预估模型中的未知系数a0~a6,从而得到一个数值模型,剩余的i-7组数据对用来计算该数值模型的模型误差.由此重复次计算与验证,模型误差最小的数值模型即为夹持力预估模型.
基于所提出的夹持力预估模型的建模方法,设计出手术器械夹持力预估模型的完整建模流程如图 2所示.

图2 夹持力预估模型的建模流程Fig.2 Modeling process of the clamping force prediction model
1.2 夹持力补偿建模
建立微创器械的夹持力预估模型后,即可在此基础上计算器械不同姿态下的开合关节驱动力矩的补偿量.Fd表示设定的微创器械夹持力的期望输出值,需要指出的是,因为手术任务和手术目的各异,不同的微创器械具有不同的夹持力期望输出值,具体的数值应根据实际手术需要设定.0τ表示驱动端的初始输出转矩,rτ表示驱动端在(α,β,)γ姿态下的期望输出转矩.为简化夹持力预补偿模型,假设在姿态不变的情况下,夹持力输出与驱动力输入呈线性关系,则可以得到

由此,可以得到(α,β,)γ姿态下的期望输出转矩表达式为

当器械末端运动至(α,β,)γ姿态处时,电机的输出力矩补偿量为

需要指出的是,本文所提出的建模方法是在对手术器械样本数据采集的基础上进行的,建模所需的输入、输出数据均来自于对微创手术器械的标定与测量.由于不同的手术器械具有不同的末端结构、传动形式、关节布局以及材料组成,其各项初始参数均会存在差异,因此,在基于该建模方法的实例应用中,应针对每种微创手术器械分别进行建模,夹持力期望输出值则需要根据器官或血管的软组织特性以及对夹持力的需求予以具体设定.
该建模方法的优点是只需要用到姿态信息(输入量)与夹持力信息(输出量)两种数据,而无需考虑器械传动中间环节中的各种复杂因素对夹持力的影响,因而变量少且计算量小.当然,由于夹持力预估模型是在有限数据量基础上建立起来的,通过增加姿态选取量可以有效降低模型的计算误差,但也会相应地增大计算量,因此,具体的姿态选取个数应根据具体器械的用途和目的来决定.
2 “妙手S”系统及其手术器械
“妙手S”系统组成如图3所示.该主从式微创机器人系统主要包括主操作端和从操作端两部分.其中,主操作端集成有主手和图像显示器;从操作端包含从手、手术器械和内窥镜.

图3 “妙手S”机器人系统组成Fig.3 Composition of“Microhand S”robot system
从手通过在末端添加被动关节的方式[15]来满足切口约束要求.其手术器械则采用具有末端自转特性的“自转-偏转-自转-开合”式末端自由度布局形式,如图 4所示,器械末端各自由度关节均通过丝传动结构实现动力传递.

图4 “妙手S”机器人微创手术器械Fig.4 MIS instrument of“Microhand S”robot
“妙手 S”机器人手术器械的快换机构如图 5所示,快换机构布置在从手末端,用于实现手术器械的快速安装与撤离.驱动系统与快换接口高度集成在同一基座中,从而实现了快换机构的模块化设计.

图5 “妙手S”机器人手术器械快换机构Fig.5 Quick-exchange mechanism of the instrument of“Microhand S”robot
手术器械在术中属于无菌单元,为实现机器人无菌单元与非无菌单元之间的物理隔离,在快换接口处设计添加了隔离板.隔离板装入及手术器械快换流程如图 6所示.在上述程序执行过程中,对隔离板的装入感知以及对器械的装入与撤离感知分别通过接近传感器实现.

图6 隔离板装入及器械快换流程Fig.6 Isolating board loading and quick exchanging process of instrument
3 实验研究
由第2节可知,“妙手S”手术器械的快换机构采用高度集成的模块化设计,考虑到手术器械是微创手术机器人相对独立的结构单元,为方便实验测试,首先利用快换机构与手术器械搭建单元性能测试平台,并基于本文所提出的夹持力预补偿建模方法,建立微创手术器械的夹持力预补偿模型.随后,依托“妙手 S”系统,通过设计模拟缝合实验以及动物实验来验证所建立的微创机器人手术器械夹持力预补偿模型的有效性.
3.1 手术器械夹持力建模实验
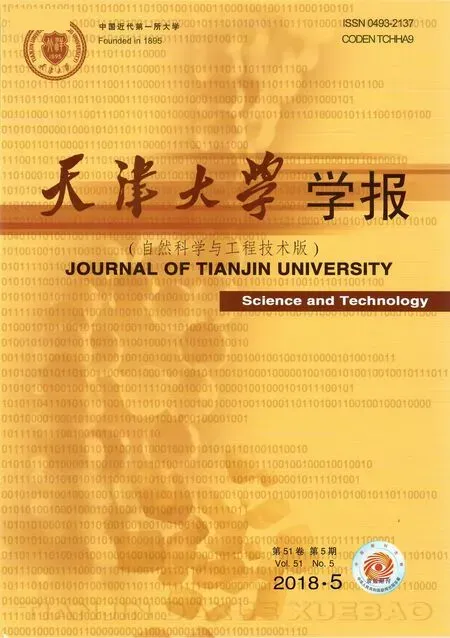
根据第 2节所提出的手术器械夹持力预补偿建模方法,实验主要包括夹持力测量、预补偿建模两部分.夹持力测量实验装置如图 7所示,通过在手术器械的两钳体之间布置压力传感器,可以测量出手术器械在闭合时的夹持力大小.本实验采用 TeKscan公司的超薄型电阻式压力传感器(Flexiforce,Tekscan,South Boston,MA,USA),标准量程为 25,N,线性度小于2%,.
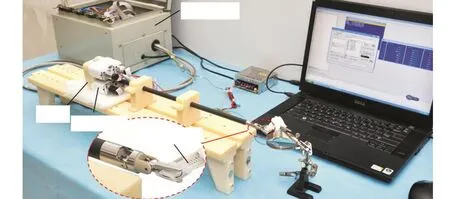
图7 夹持力测量实验设置Fig.7 Experimental setup of clamping force measurement
器械末端腕部 3个关节的(α,β,γ)转角范围分别是(-90°,90°)、(-70°,70°)、(-90°,90°).每个关节分别选取几种典型位姿下的关节角度值作为输入参数,所对应的姿态角度α、β、γ的取值分别为(-90°,0°,90°)、(-70°,0°,70°)和(-90°,0°,90°),在本实验中,共选取 27组姿态作为输入量,测量每组姿态下的器械夹持力值.
随后,在27组“姿态-夹持力”数据组中随机选取7组用来求解未知系数a0~a6,剩余的20组数据用来校验模型误差.因此,总共需要计算和分析888,030组系数,模型误差最小的那组系数即为最优系数组.实验中,预设电机的初始输出转矩0τ为3.5mN·m.对应每种腕部姿态下的夹持力重复测量5次,并计算平均夹持力,测量结果如图8和表1所示.
对测得的各姿态下的夹持力数据再求平均值,可以分别得到手术器械的整体平均夹持力为 14.13,N.Lee等[14]实验测得的 da Vinci微创机器人手术器械大针持的平均夹持力为 11.65,N,通过参考 da Vinci微创机器人手术器械的实验数据可知,“妙手 S”机器人手术器械所提供的夹持力可以满足微创手术需求.此外,由图 9 可知,在腕部关节转角(90°,0°,0°)处测得最大平均夹持力为 18.29,N,在腕部关节转角(0°,70°,-90°)处测得最小平均夹持力为 10.72,N,最大与最小平均夹持力之比为1.71,这也就意味着器械在不同末端姿态情况下的夹持力输出差值可能存在较大差异,因此,建立夹持力预补偿模型,实现器械夹持力的稳定输出显得尤为必要.
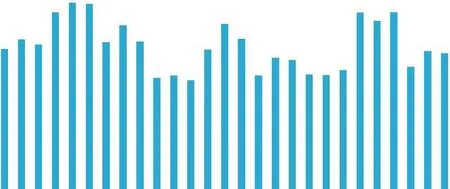
图8 不同姿态下的夹持力测量数据Fig.8 Clamping force measurement datas under different attitudes

表1 组合序号对应器械腕部各关节角Tab.1 Serial numbers correspond to the angle value of wrist joints of instrument
基于测量数据,并结合所提出的夹持力建模方法,可以确定通过(-90°,70°,90°),(-90°,70°,0°),(0°,0°,-90°),(0°,-70°,90°),(90°,-70°,0°),(90°,70°,-90°),(90°,70°,90°)等 7 组腕部转角所计算出的模型系数组为最优系数组,由式(2)得到夹持力预估模型为

根据针持的测试数据并结合腔镜器械的操作经验,设定器械的夹持力输出期望值Fd为 15.7,N,则由式(5),可以得到器械夹持力预补偿模型为

3.2 模拟缝合实验
接下来,通过模拟缝合操作实验来验证所得出的夹持力补偿模型的实用性.将手术器械装入微创手术机器人“妙手 S”的快换装置,器械前端伸入腹腔镜模拟器中,在模拟器底部固定放置缝合培训专用仿真组织,如图 9所示.在微创器械的两钳瓣之间加装压力传感器 Flexiforce,通过控制主手使器械夹持压力传感器,并操持主手模拟缝合轨迹重复完成两次器械位姿调整运动,并在执行第2次运动时在控制系统中加入夹持力预补偿模型.
两次缝合动作过程中手术器械的夹持力变化如图 10所示,在完成第 1次缝合动作中,夹持力随腕部各关节的运动而出现较大幅值的变化(变化范围11.2~16.7,N);在第 2次缝合动作中,夹持力变化幅值很小(变化范围 15.2~15.9,N),器械实现了稳定的夹持力输出.由此验证了夹持力补偿模型的实用性,也证明了本文所提出的夹持力建模方法的可行性.
图9 模拟缝合操作实验场景Fig.9 Experiment scene of simulated suture operation
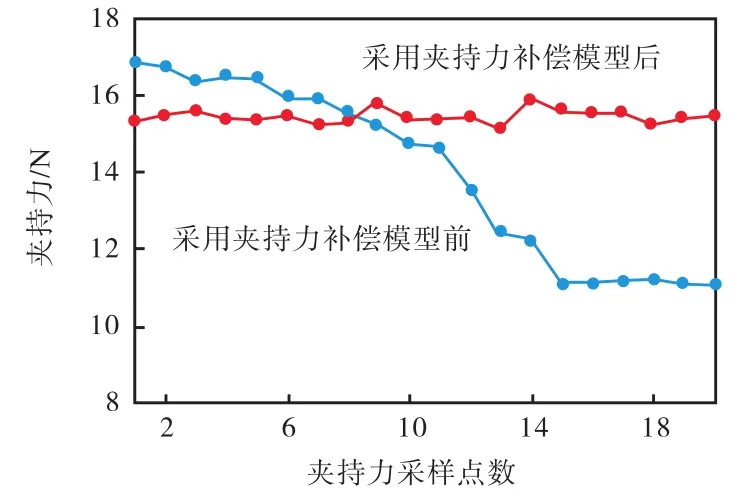
图10 夹持力输出变化曲线Fig.10 Curve of clamping force output
3.3 动物实验
本文以动物(猪)为实验对象,利用“妙手 S”微创手术机器人系统开展了动物实验研究.实验内容为猪胃肠吻合手术,实验场景以及手术操作过程如图11所示.手术中,由1名医师主刀操作,另有1名医师作为助手从旁协助.在手术实施过程中,根据手术任务和手术需要的不同,分别执行了胃肠组织牵拉、剪切、游离等手术操作,以及缝合、打结等精细手术操作.
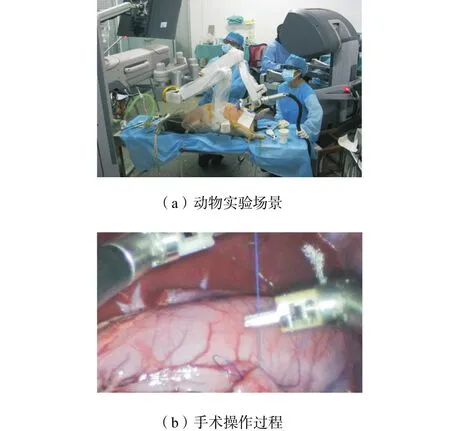
图11 动物实验过程Fig.11 Animal experiment
动物(猪)胃肠吻合手术顺利完成,各项手术操作均按预期完成,手术中无误操作产生.手术机器人分别在未引入补偿算法和引入补偿算法两种情况下实施手术操作,在执行组织提拉、游离等操作时,引入补偿算法前的器械在某些姿态下会出现组织滑脱现象,而引入补偿算法后的器械对组织和器官实施了连续稳定的夹持,未出现组织滑脱和损伤等现象;在执行缝合、打结等复杂操作中,引入补偿算法前的器械在一些姿态下进行缝合时出现了滑针现象,而引入补偿算法后的器械对缝合针、线实施了有效的夹持,缝合针在器械夹持下能够以准确的角度一次性穿过待缝合组织,打结中未出现线打滑情况.动物实验结果与模拟缝合实验的结果一致,进一步验证了微创机器人手术器械夹持力预补偿模型的实用性,进而有效验证了本文所提出的夹持力预补偿建模方法的可行性.
4 结 语
对微创手术机器人而言,稳定有效的夹持力输出是保证手术操作顺利完成的基本条件.本文基于输入输出样本建构中间模型的思想,提出一种微创手术机器人丝传动器械夹持力补偿建模方法,并通过实验研究验证了所提方法的可行性.该建模方法可以在不额外引入传感设备的情况下,准确地完成微创手术机器人夹持力的预测与补偿,实现稳定连续的夹持力输出,对提高机器人辅助微创手术操作质量、降低手术安全风险具有重要意义.
需要指出的是,该建模方法的适用范围并不局限于常用的四自由度手术器械,还可应用于更高自由度手术器械的夹持力建模中,但相应的待求模型参数也会增加,即输入输出样本选取量以及建模计算量也会相应加大.建模计算中夹持力期望输出值,需要根据各种器官与血管的软组织特性以及对夹持力基本需求而定,这就需要在实际手术前测定待手术器官或血管的夹持特性.此外,建模计算中为简化模型考虑,假定输出力与驱动力矩之间是线性关系,实验研究证明所建立的模型可以满足手术需求,即该种假定在实例应用中是可行的.然而,由于钢丝弹性伸长量变化、丝轮摩擦等因素影响,实际输出力与驱动力矩之间往往不是严格呈线性关系的,因此,从提高模型精度、提升手术操作质量方面考虑,还应进一步研究输出力与驱动力矩之间的非线性关系.上述两部分内容将在后续工作中予以扩展研究.作为一种辅助手术设备,微创机器人除应具备精准的操作性能外,还需满足安全性、操作舒适性等手术要求.因此,接下来的研究工作应是在充分调研手术安全性要求、医生操作需求的基础上,优化与完善系统的各项功能,为下一步的临床测试打下扎实的基础.
:
[1] Wang X F,Wang S X,Li J M,et al. Easy grasp:A novel hybrid-driven manual medical instrument for laparoscopic surgery[J]. Journal of Mechanical Engineering Science,2012,226(12):2990-3001.
[2] 王树新,刘玉亮,李进华,等. 腹腔微创手术机器人远程控制平台开发及实验[J]. 天津大学学报:自然科学与工程技术版,2015,48(12):1041-1049.Wang Shuxin,Liu Yuliang,Li Jinhua,et al. Development and experiment of a tele-operated platform forminimally invasive laparoscopic surgery based on microhand robot[J],Journal of Tianjin University:Science and Technology,2015,48(12):1041-1049(in Chinese).
[3] Marescaux J,Rubino F. The Zeus robotic system:Experimental and clinical application [J]. Surgical Clinics of North America,2003,83(6):1305-1315.
[4] Lewis A,Hannaford B. Dynamically evaluated gravity compensation for the Raven surgical robot[C]//IEEE International Conference on Robotics & Automation. Hong Kong,China,2014:2534-2539.
[5] Mohareri O,Ramezani M,Adebar T K,et al.Automatic localization of the da Vinci surgical instrument tips in 3-D transrectal ultrasound[J]. IEEE Transactions on Biomedical Engineering,2013,60(9):2663-2672.
[6] Haber G P,White M A,Autorino R,et al. Novel robotic da Vinci instruments for laparoendoscopic singlesite surgery[J]. Urology,2010,76(6):1279-1282.
[7] Cavusoglu M C,Williams W,Tendick F,et al. Robotics for telesurgery:Second generation Berkeley/UCSF laparoscopic telesurgical workstation and looking towards the future applications[J]. Industrial Robot,2003,30(1):22-29.
[8] Kroh M,Elhayek K,Rosenblatt S,et al. First human surgery with a novel single-port robotic system:Cholecystectomy using the da Vinci single-site platform[J]. Surgical Endoscopy,2011,25(11):3566-3573.
[9] Bae S U,Jeong W K,Bae O S,et al. Reduced-port robotic anterior resection for left-sided colon cancer using the da Vinci single-site platform[J]. International Journal of Medical Robotics and Computer Assisted Surgery,2015,12(3):517-523.
[10] Sang H Q,Wang S X,Li J M,et al. Control design and implementation of a novel master-slave surgery robot system,MicroHand A[J]. International Journal of Medical Robotics and Computer Assisted Surgery,2011,7(3):334-347.
[11] Nawrat Z. Robin heart progress-advances material and technology in surgical robots[J]. Bulletin of the Polish Academy of Sciences,2010,58(2):323-327.
[12] Kong K,Li J M,Zhang H F,et al. Kinematic design of a generalized double parallelogram based remote center-of-motion mechanism for minimally invasive surgical robot[J]. Journal of Medical Device,2016,10(4):041006.
[13] Cundy T P,Gattas N E,Yang G Z,et al. Experience related factors compensate for haptic loss in robotassisted laparoscopic surgery[J]. Journal of Endourology,2014,28(5):532-538.
[14] Lee C,Park Y H,Yoon C,et al. A grip force model for the da Vinci end-effector to predict a compensation force[J]. Medical & Biological Engineering & Computing,2015,53(3):253-261.
[15] 王树新,孔 康,杨英侃,等. 具有自适应能力的手术机器人操作臂:201610536548. 7[P]. 2016-10-26.Wang Shuxin,Kong Kang,Yang Yingkan,et al. An Adaptive Surgical Manipulator Operating Arm:201610536548. 7[P]. 2016-10-26(in Chinese).
猜你喜欢
护理与康复(2022年6期)2022-11-25
健康体检与管理(2022年4期)2022-05-13
世界最新医学信息文摘(2021年12期)2021-06-09
世界最新医学信息文摘(2021年12期)2021-06-09
世界最新医学信息文摘(2020年88期)2020-12-24
甘肃教育(2020年18期)2020-10-28
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
意林(2015年20期)2015-10-21