永磁同步电机电流控制模型的无传感器运行
2018-05-14 13:31魏海峰韦汉培张懿戴阳
电机与控制学报 2018年8期
关键词:永磁同步电机
魏海峰 韦汉培 张懿 戴阳
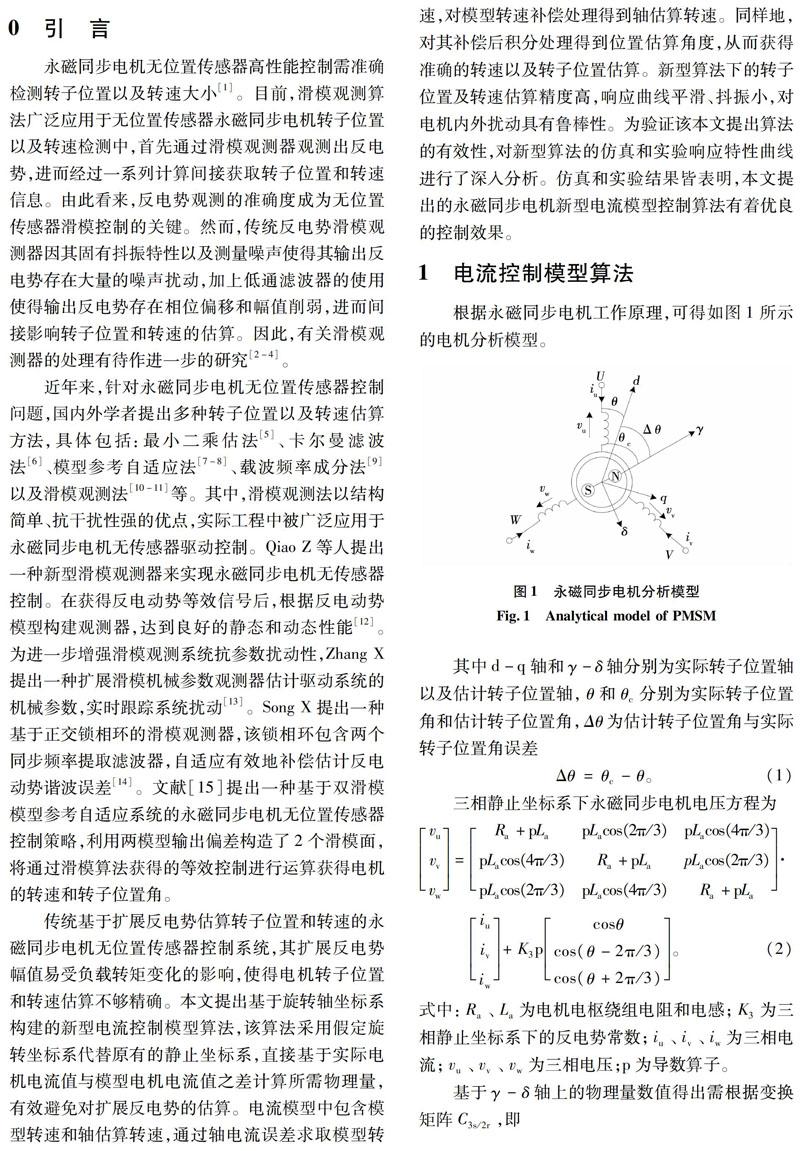

摘 要:传统基于扩展反电势估算转子位置和转速的永磁同步电机无位置传感器控制系统,其扩展反电势幅值易受负载转矩变化影响,使得电机转子位置和转速估算不精确。针对该问题,基于实际电机電流值与模型电机电流值之差,提出γ-δ旋转坐标系下的永磁同步电机无位置传感器电流控制模型算法。新型电流控制模型算法包含模型转速和γ-δ轴估算转速,通过δ轴电流误差求取模型转速,对模型转速补偿处理得到轴估算转速。在此基础上,对轴估算转速补偿后积分处理得到转子位置估算,从而获得准确的电机转速,避免了扩展反电势的求取。仿真和实验结果表明新型电流控制模型算法负载转矩波动下动态转矩性能良好,对电机内部参数摄动和外部干扰具有鲁棒性。
关键词:永磁同步电机;无传感器控制;γ-δ旋转坐标系;电流控制模型算法
中图分类号:TM 301
文献标志码:A
文章编号:1007-449X(2018)08-0075-07
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11