
永磁同步电机滑模直接转速观测器
2018-05-14 13:31陆骏杨建国
电机与控制学报 2018年1期
关键词:永磁同步电机
陆骏 杨建国
摘 要:在传统的间接转速观测器中,位置观测值的微分环节、反电势观测值的低通滤波及相位补偿环节会降低转速观测精确度和动态响应速度。针对该问题提出了一种基于滑模的永磁同步电机直接转速观测器(DSMSO)。通过永磁同步电机电流动态微分方程,建立滑模观测模型。根据李雅普诺夫稳定性原理,推导出观测器的收敛条件。在得出观测器参数的同时,推导出电机的转速估算公式。仿真和实验结果表明,提出的DSMSO与间接转速观测器相比,在低速和中高速稳态运行情况下转速稳态观测精确度分别提高了40.68%和50%,同时变速阶段的转速动态观测精确度分别提高了51.67%和32.61%,误差收敛速度分别提高了33.33%和25%,验证了DSMSO的可行性和有效性。
关键词:永磁同步电机;无传感器;滑模变结构;转速观测;直接转矩控制
中图分类号:TM 301.2
文献标志码:A
文章编号:1007-449X(2018)01-0086-07
0 引 言
永磁同步电机(permanent magnetic synchronous motor,PMSM)由于其体积小、结构简单、效率高等一系列的优点,在国防工业和日常生活中得到越来越广泛的应用。永磁同步电机的调速系统通常需要在电机轴上安装位置和速度传感器,由此带来以下问题:1)受环境温度、湿度、振动、检测距离等因素影响,传感器精度可能会降低甚至无法使用;2)传感器的安装和维护增加了系统的成本和复杂性,降低了系统可靠性;3)传感器增加了系统的转动惯量,加大了电机的空间尺寸和体积。因此,在航空航天飞行器、舰船潜艇等的现代机电控制系统中,永磁同步电机无传感器速度闭环伺服控制占有重要位置,成为了电机控制领域的研究热点。国内外很多学者对无传感器矢量控制[1]和直接转矩控制[2]系统进行了大量研究,取得了巨大进展,其中直接转矩控制(direct torque control,DTC)技术近年来引起了高度关注,这是因为直接转矩控制仅仅需要定子的电阻、电流、电压信息,具有很好的动态特性。相比于磁场定向控制,直接转矩控制不需要转子的位置信息来实现静止和旋转坐标系间的坐标转换,因此更适合实现转速闭环控制的无传感器运行,对转速估算的性能要求也更高。
为取代传感器,许多学者已经提出了以下多种估算转子位置和速度的方法[3-8]:定子磁链估算法、模型参考自适应法、状态观测法、高频注入法、人工智能估算法等。在状态观测法中,可利用滑模变结构控制理论来构建电机的转速、位置观测器[9-11]。滑模变结构控制已广泛应用于交流电机控制系统[12-13],它对系统数学模型精度要求不高,對系统参数变化、外界环境扰动及内部摄动等具有很强的鲁棒性[14-15]。通常的滑模变结构速度观测器是用来估算电机的反电动势,再根据反电动势里包含的转角信息计算出转子的位置,最后将得到位置进行微分处理得到电机转速。由于不是直接得出速度,因此属于间接速度观测器[16]。间接观测器中的位置微分环节会放大速度观测的误差[17]。另外,包含转子位置信号的反电动势通常用一定频率的开关信号表征,故需要对开关信号进行低通滤波才可以得到需要的位置信息。低通滤波使得观测计算量增大,并且需要对反电动势滤波后得到的位置信息进行相位补偿[18],其补偿又依赖反电动势的频率即转子转速,从而进一步降低了转速的估计精度,这在变速时尤为明显。
为了实现高性能的无传感器DTC转速闭环控制,本文针对其特点提出了一种新颖的直接转速观测器DSMSO。通过永磁同步电机电流动态微分方程,建立滑模观测模型。根据李雅普诺夫稳定性原理,推导出观测器的收敛条件。在得出观测器参数的同时,推导出电机的转速估算公式,省去了传统间接转速观测器常用的位置观测值微分环节、滑模高频开关信号的低通滤波环节以及反电势观测值的相位补偿。使用仿真工具SIMULINK建立无速度传感器直接转矩控制系统的仿真模型,基于TI公司DSP(TMS320F2812)进行实验,验证了该观测器的有效性和优异性能。
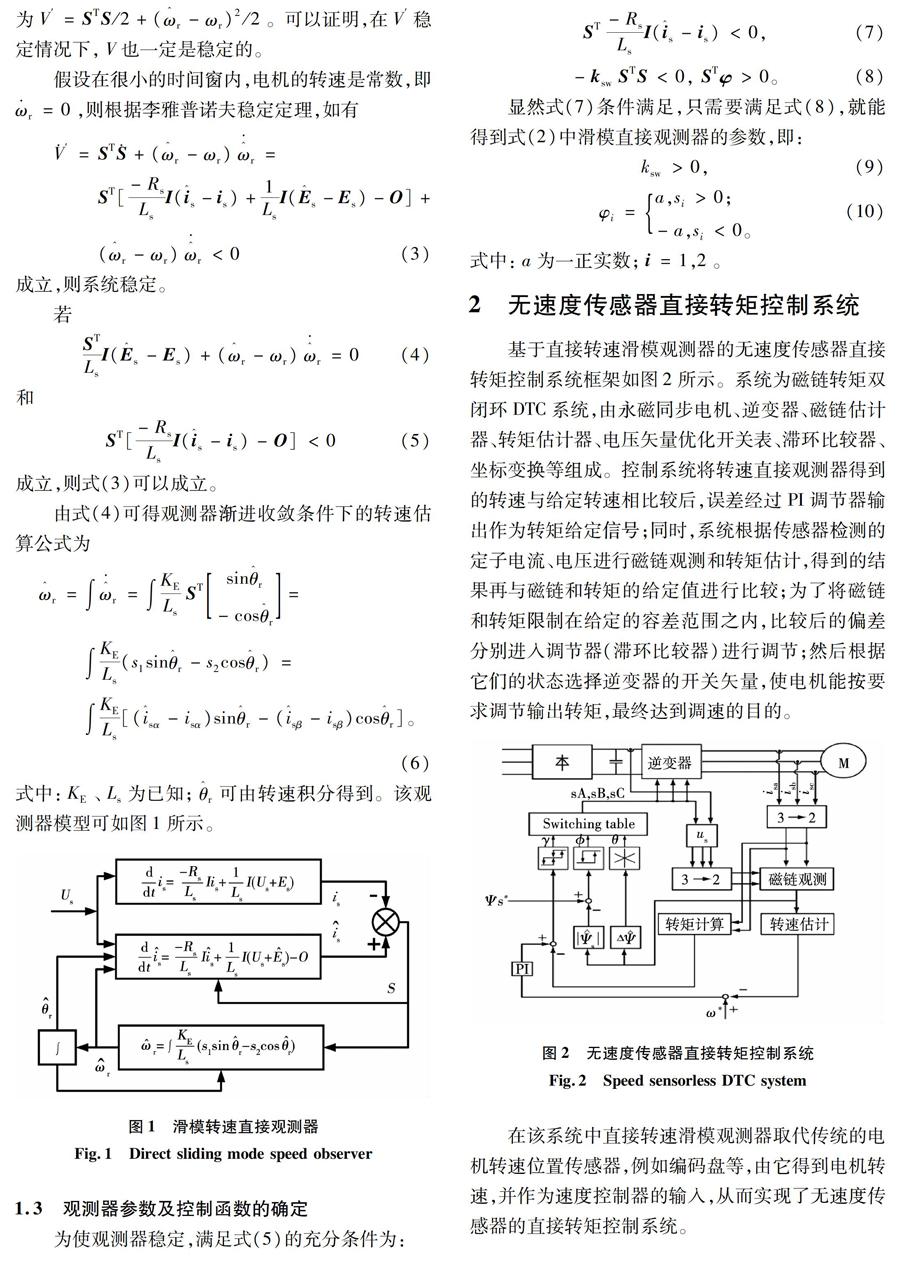
2 无速度传感器直接转矩控制系统
基于直接转速滑模观测器的无速度传感器直接转矩控制系统框架如图2所示。系统为磁链转矩双闭环DTC系统,由永磁同步电机、逆变器、磁链估计器、转矩估计器、电压矢量优化开关表、滞环比较器、坐标变换等组成。控制系统将转速直接观测器得到的转速与给定转速相比较后,误差经过PI调节器输出作为转矩给定信号;同时,系统根据传感器检测的定子电流、电压进行磁链观测和转矩估计,得到的结果再与磁链和转矩的给定值进行比较;为了将磁链和转矩限制在给定的容差范围之内,比较后的偏差分别进入调节器(滞环比较器)进行调节;然后根据它们的状态选择逆变器的开关矢量,使电机能按要求调节输出转矩,最终达到调速的目的。
在该系统中直接转速滑模观测器取代传统的电机转速位置传感器,例如编码盘等,由它得到电机转速,并作为速度控制器的输入,从而实现了无速度传感器的直接转矩控制系统。
3 仿真及实验结果分析
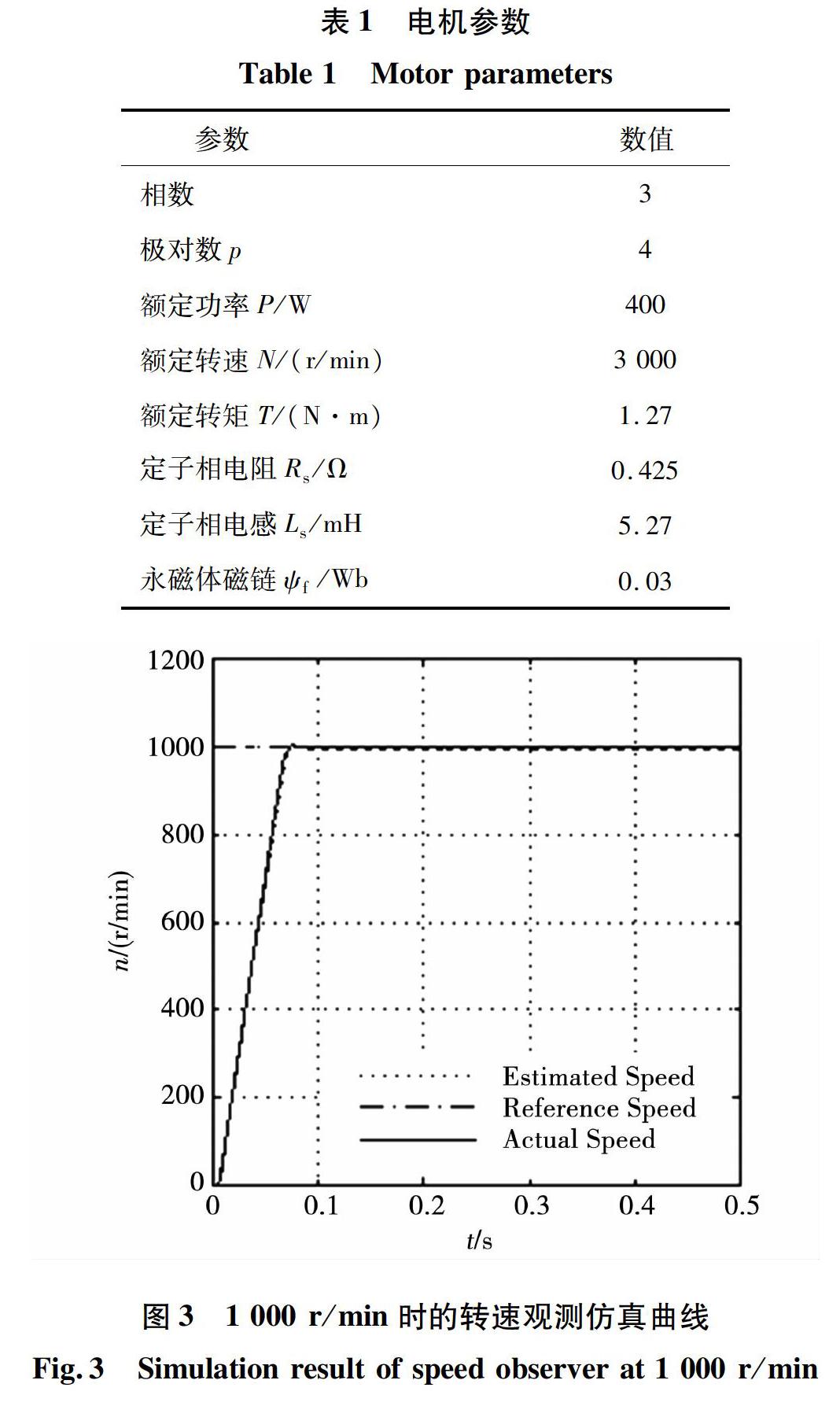
仿真及实验所用电机参数如表1所示,外加负载转矩为0.5 N·m。
3.1 仿真结果及分析
利用Matlab的仿真工具SIMULINK建立仿真模型。为了验证本文提出的滑模转速直接观测器的准确性,将电机实际转速和观测器估算结果之差作为观测精确度,并与现有的间接观测器[16]作对比。
首先进行电机在中高速范围内运行时(大于额定转速的10%)观测器的仿真及分析,图3显示了电机从静止启动后达到1 000 r/min的变速过程, DSMSO的转速估计值较好地跟踪了实际转速。
图4是该过程中的间接观测器与DSMSO的转速观测误差比较图。从图4可以看出,当转速从零升至1 000 r/min的动态过程中,间接观测器的动态误差为21.4 r/min,误差收敛时间为0.12 s;DSMSO的动态误差为14.9 r/min,误差收敛时间为0.076 s。在1 000 r/min的稳定转速下,间接观测器的稳态误差为4 r/min,DSMSO的稳态误差为2 r/min。与现有的间接转速观测器相比,在PMSM中高速稳态运行情况下,转速观测精度提高了50%;当变速时,转速观测精度提高了30.37%,误差收敛速度提高了36.67%。更多中高速下的转速观测仿真结果表明, 相比于其他文献提出的间接观测器,DSMSO观测器在中高速范围内始终具有更高的稳态和动态观测精确度以及观测误差收敛速度。
图5和图6是电机在低速范围内运行(小于额定转速的10%)观测器的仿真及分析。图5显示了电机从静止启动后达到50 r/min的变速过程, DSMSO的转速估计值较好地跟踪了实际转速,图6是该过程中的间接观测器与DSMSO的转速观测误差比较图。从图6可以看出,当转速从零升至50 r/min的動态过程中,间接观测器的动态误差为10.1 r/min,误差收敛时间为0.05 s;DSMSO的动态误差为7.2 r/min,误差收敛时间为0.03 s。在50 r/min的稳定转速下,间接观测器的稳态误差为1.3 r/min,DSMSO的稳态误差为1.2 r/min。与现有的间接转速观测器相比,在PMSM低速稳态运行情况下,转速观测精确度提高了7.69%;当变速时,转速观测精确度提高了28.71%,误差收敛速度提高了40%。更多30 r/min以上低速范围内的转速观测仿真结果表明,相比于其他文献提出的间接观测器,DSMSO观测器始终具有更高的稳态和动态观测精确度以及观测误差收敛速度。
3.2 实验结果及分析
为了检验滑模转速直接观测器的准确性,在一套完整的伺服系统上进行实验,图7是该实验平台及系统组成图。该系统中的永磁同步电机带有2500线的增量式编码盘,将编码盘反馈的转速作为电机实际转速同观测器观测结果进行比较。系统中逆变器开关频率为16 kHz,控制电路的数字信号处理芯片是TI公司的TMS320F2812。AD转换器为DSP自带的AD模块,分辨率为12位。可调直流电源与磁滞离合器共同组成了可调负载机构,负载力矩为0.5 N·m。
图8是实验过程中的转速观测曲线图,可以看出电机由静止启动经过0.05 s左右的加速后达到50 r/min转速,恒速运行大约25 s后,又经过0.1 s左右的加速后达到1 000 r/min转速。图9是该实验过程中编码器反馈转速和观测转速的差值曲线图。由于实验总时长较大,为更清晰地体现变速时的瞬态转速观测误差,在时间轴上对变速过程曲线进行了放大。
从图9可以看出实验结果和仿真结果基本相符,当转速从零分别升至50 r/min和1 000 r/min的动态过程中,间接观测器的动态误差分别为12 r/min和23 r/min,误差收敛时间分别为0.06 s和0.12 s;DSMSO的动态误差分别为5.8 r/min和15.5 r/min,误差收敛时间分别为0.04 s和0.09 s。在50 r/min和1 000 r/min的稳定转速下,间接观测器的稳态误差分别为5.9 r/min和8.2 r/min,DSMSO的稳态误差分别为3.5 r/min和4.1 r/min。与现有的间接转速观测器相比,在PMSM低速及中高速稳态运行情况下,转速观测精确度分别提高了40.68%和50%;当变速时,转速观测精确度分别提高了51.67%和32.61%,误差收敛速度提高了33.33%和25%。更多30 r/min以上的转速观测实验结果表明, 相比于其他文献提出的间接观测器,DSMSO观测器始终具有更高的稳态和动态观测精确度以及观测误差收敛速度。而在低于30 r/min的实验中,由于反电动势的估算已经相当困难,导致转速观测器误差过大甚至失效[19]。
4 结 论
本文提出了一种新颖的无速度传感器直接转矩控制的实现方法——滑模直接转速观测器DSMSO,构建了永磁同步电机的高性能无传感器转速闭环控制系统。实验结果表明,由于省去了位置观测值微分环节、滑模高频开关信号的低通滤波环节以及反电势观测值的相位补偿环节,相比传统的间接转速观测器,本文提出的DSMSO在低速和中高速运行情况下,转速稳态观测精确度分别提高40.68%和50%,转速动态观测精确度分别提高51.67%和32.61%,误差收敛速度分别提高33.33%和25%。
由于本文提出的滑模直接转速观测器仍然依赖电机的基波模型,因此在极低速或零速时反电动势的估算已经相当困难,导致转速观测器误差过大甚至失效,只能通过外加高频激励等其他方式来实现无传感器控制。
参 考 文 献:
[1] 刘和平, 薛鹏飞, 彭东林. 基于非线性磁链动态模型的无速度传感器矢量控制系统[J].电机与控制学报,2015,19(12):33.
LIU Heping, XUE Pengfei, PENG Donglin. Speed sensorless vector control system based on nonlinear flux dynamic model[J]. Electric Machines and Control,2015,19(12):33.
[2] 牛峰, 李奎, 王尧. 永磁同步电机模型预测直接转矩控制[J].电机与控制学报,2015,19(12):60.
NIU Feng, LI Kui, WANG Yao. Model predictive direct torque control for permanent magnet synchronous machines[J]. Electric Machines and Control,2015,19(12):60.
[3] 刘毅, 贺益康, 秦峰.基于转子凸极跟踪的无位置传感器PMSM矢量控制研究[J].中国电机工程学报,2005,25(17):121.
LIU Yi,HE Yikang,QIN Feng. Investigation of rotor saliencytracking based sensorless vector control drive for PMSM[J]. Proceedings of the CSEE,2005,25(17):121.
[4] 尹忠刚,刘静,钟彦儒,等. 基于双参数模型参考自适应的感应电机无速度传感器矢量控制低速性能[J].电工技术学报,2012,27(7):124.
YIN Zhonggang,LIU Jing,ZHONG Yanru,et al. Lowspeed performance for induction motor sensorless vector control based on twoparameter model reference adaptation[J]. Transactions of China Electrotechnical Society,2012,27(7):124.
[5] 滕青芳,柏建勇,朱建国,等. 基于滑模模型参考自适应观测器的无速度传感器三相永磁同步电机模型预测转矩控制[J].控制理论与应用,2015,32(2):150.
TENG Qingfang,BAI Jianyong,ZHU Jianguo,et al.Sensorless model predictive torque control using slidingmode model reference adaptive system observer for permanent magnet synchronous motor drive system[J]. Control Theoryand Applications,2015,32(2):150.
[6] QUANG N K,HIEU N T, HA Q P. FPGAbased sensorless PMSM speed control using reducedorder extended kalman filters[J]. IEEE Transactions on Industrial Electronics,2014,61(12):6574.
[7] MAURIZIO C,MARCELLO P. An MRASbased sensorless highperformance induction motor drive with a predictive adaptive model[J]. IEEE Transactions on Industrial Electronics,2005,52(2):532.
[8] 秦峰, 贺益康.两种高频注入法的无传感器运行研究[J].中国电机工程学报,2005,25(5):116.
QIN Feng, HE Yikang. Comparative investigation of sensorless control with two highfrequency signal injection schemes[J]. Proceedings of the CSEE,2005,25(5):116.
[9] HOSSEYNI A,TRABELSI R,MIMOUNI M F,et al. Sensorless sliding mode observer for a fivephase permanent magnet synchronous motor drive[J]. ISA Transactions,2015,58:462.
[10] FOO G,RAHMAN M F. Sensorless slidingmode MTPA control of an IPM synchronous motor drive using a slidingmode observer and HF signal injection[J]. IEEE Transactions on Industrial Electronics,2010,57(4):1270.
[11] WANG Gaolin,LI Zhuomin,ZHANG Guoqiang,et al. Quadrature PLLbased highorder slidingmode observer for IPMSM sensorless control with online MTPA control strategy[J]. IEEE Transactions on Energy Conversion,2013,28(1):214.
[12] 万健如,宫成,刘暐,等. 基于MTPA的永磁同步电机滑模变结构直接转矩控制[J].电机与控制学报,2012,16(3):30.
WAN Jianru,GONG Cheng,LIU Wei,et al. Sliding mode variable structure control of permanent magnet synchronous machine based on MTPA[J]. Electric Machines and Control,2012,16(3):30.
[13] SALEM F B,DERBEL N. Direct torque control of induction motors based on discrete space vector modulation using adaptive sliding mode control[J]. Electric Power Components and Systems,2014,42(14):1598.
[14] 王豐尧.滑模变结构控制[M].北京:机械工业出版社,2008:10-11.
[15] 姚琼荟,黄继起,吴汉松, 等.变结构控制系统[M].重庆:重庆大学出版社,2005:20-21.
[16] CHI Wenchun, CHENG Mingyang. Implementation of a slidingmodebased position sensorless drive for highspeed micro permanentmagnet synchronous motors[J]. ISA Transactions,2014,53(2):444.
[17] ZHAO Yue,QIAO Wei,WU Long. Improved rotor position and speed estimators for sensorless control of interior permanentmagnet synchronous machines[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics,2014,2(3):627.
[18] QIAO Zhaowei,SHI Tingna,WANG Yindong,et al. New slidingmode observer for position sensorless control of permanentmagnet synchronous motor[J]. IEEE Transactions on Industrial Electronics,2013,60(2):710.
[19] LIU Jingbo,NONDAHL T A,SCHMIDT P B, et al. Rotor position estimation for synchronous machines based on equivalent EMF[J]. IEEE Transactions on Industry Applications,2011,47(3):1310.
(编辑:张 楠)
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11
