
载货汽车多侧翻指标关联性分析与实用化表征方法研究
2018-05-14 12:19蒋元广皮大伟闫明帅
河北科技大学学报 2018年2期
关键词:车辆工程
蒋元广 皮大伟 闫明帅
摘要:以優化载货汽车实用化侧翻预警指标表征方法为目的,针对3种侧翻指标(侧向加速度、侧倾角、横向载荷转移率)展开理论关联性分析和动力学仿真试验验证。基于简化的车辆侧倾动力学模型,推导3种侧翻指标关联模型,在Matlab/Simulink中建立基于某轻型载货汽车实际参数的非线性多自由度动力学模型,设置车速与转向角独立变化的2组阶跃转向工况,研究车辆侧翻指标定量关联性及实用化表征方法。通过最终稳定点的分布拟合得到侧倾角和横向载荷转移率与侧向加速度之间的线性数值化模型,进而验证了提出利用侧向加速度间接表征侧倾角和横向载荷转移率的实用化侧翻预警指标表征方法。结果表明:随着方向盘转角和车速的提高,侧倾角和横向载荷转移率与侧向加速度在整个仿真过程中能够快速趋于稳态。通过此法计算出的车辆侧倾角和横向载荷转移率,为后续车辆侧翻预警控制系统的设计提供了良好的指标基础。
关键词:车辆工程;载货汽车;侧向加速度;侧倾角;横向载荷转移率
中图分类号:TK172文献标志码:A
收稿日期:20171103;修回日期:20180202;责任编辑:张军
基金项目:国家自然科学基金(51205204);江苏省六大人才高峰项目(2014003)
第一作者简介:蒋元广(1975—),男,山东菏泽人,工程师,博士,主要从事新能源汽车、车辆动力学控制等方面的研究。
通信作者:皮大伟副教授。Email:pidawei@mail.njust.edu.cn
蒋元广,皮大伟,闫明帅.载货汽车多侧翻指标关联性分析与实用化表征方法研究[J].河北科技大学学报,2018,39(2):107114.
JIANG Yuanguang,PI Dawei,YAN Mingshuai.Study on the correlation and practical characterization method of multirollover indices for trucks[J].Journal of Hebei University of Science and Technology,2018,39(2):107114.Study on the correlation and practical characterization method of
multirollover indices for trucks
JIANG Yuanguang1, PI Dawei2, YAN Mingshuai2
(1.Nanjing Yue Bo Power System Technology Company Limited, Nanjing, Jiangsu 210019, China; 2. School of Mechanical Engineering, Nanjing University of Science and Technology, Nanjing, Jiangsu 210096, China)
Abstract:In order to optimize practical characterization method of rollover warning indices for truck, the theoretical analysis of correlation and dynamic simulation test validation are carried out for three kinds of rollover indices (lateral acceleration, roll angle, lateral load transfer rate). Based on the simplified roll dynamics model of vehicle, the model about three kinds of rollover index correlation is deduced, and a nonlinear multidegreeoffreedom dynamic model with the actual parameters of a certain light truck is established in Matlab/Simulink. The two groups of stepsteering with setting the vehicle speed and steering angle changing independently, is used to study the quantitative correlation of vehicle rollover indices and practical characterization methods. The linear quantification model between roll angle or lateral load transfer rate and lateral acceleration is obtained by fitting the distribution of the final stability point. It is verified that the practical characterization method of rollover warning indices that uses lateral acceleration to indirectly characterize roll angle and lateral load transfer rate is feasible. The results show that with the increase of the steering wheel angle and the vehicle speed, the roll angle, the lateral load transfer rate and the lateral acceleration can quickly be tend to stable state in the whole simulation process. The vehicle roll angle and lateral load transfer rate calculated by this method provide a good index basis for the design of the following vehicle rollover warning control system.
Keywords:vehicle engineering; truck; lateral acceleration; roll angle; lateral load transfer ratio
随着经济的迅速发展,载货汽车保有数量巨大[1],其行驶速度随着公路建设的完善得到了提高,由载货汽车造成的事故数量也有所增加。车辆转弯过程中由于受到离心力作用会发生侧倾现象[2],载货汽车的质心一般较高,如果盲目追求较高的转弯速度,将严重影响车辆的侧倾稳定性,甚至发生侧翻事故。侧翻事故的破坏性大,对人、车、货都具有极大的破坏性[36]。通过研究车辆侧向动力学原理,针对载货汽车提出相关侧翻指标,可以及时向驾驶员发出预警信息,甚至可以实施主动干预控制,河北科技大学学报2018年第2期蒋元广,等:载货汽车多侧翻指标关联性分析与实用化表征方法研究辅助驾驶员应对紧急工况[7]。在这个过程中,侧翻指标是整个预警系统的基础。目前有关学者提出横向载荷转移率、轮胎垂向力、侧倾角、侧向加速度[811]等指标。横向载荷转移率可以明确反映车辆内外侧车轮垂向力的变化,临界条件明确即横向载荷转移率为1时,与车辆参数无关。准确快速的轮胎垂向力测量成本较高,而且会受到路面激励的冲击影响。侧倾角虽然可以直观显示车身倾转状态,但较难精确测量。相比之下,侧向加速度测量成本较低,测量精度较高[12],但由于受到车辆参数的影响,其临界条件并不明确。笔者通过建立高自由度車辆动力学模型,从理论上建立侧向加速度与侧倾角、横向载荷转移之间的关联模型,通过设置具体仿真工况,提出基于侧向加速度、侧倾角和横向载荷转移率的实用化侧翻指标表征方法,为车辆侧翻的预警控制设计提供基础指标。
1仿真模型
1.1车辆动力学模型
为了仿真车辆在转向工况下的侧倾响应,建立14DOF(degree of freedom)整车动力学模型,如图1所示,包括车身纵向、横向、垂向位移运动,俯仰、侧倾、横摆旋转运动,以及4个车轮垂向运动和绕垂轴转动[13]。式(1)至式(31)表示了车辆各个自由度对应的动力学方程以及辅助计算方程。
图1车辆动力学模型
Fig.1Vehicle dynamics model
车辆纵向动力学方程:m(x-vyr)+mshp+mshrr=(Fwxfl+Fwxfr)cos δf-(Fwyfl+Fwyfr)sin δf+Fwxrl+Fwxrr。 (1)车辆侧向动力学方程:m(y+vxr)-mshr+mshpr=(Fwxfl+Fwxfr)sin δf+(Fwyfl+Fwyfr)cos δf+Fwyrl+Fwyrr。 (2)车身垂向动力学方程:ms(b+g)=Fsfl+Fsfr+Fsrl+Fsrr。(3)车身侧倾动力学方程:(Ix+msh2r)-Ixz-Ixy-mshr(y+vxr)cos =msghr sin +df2(Fsfl-Fsfr)+dr2(Fsrl-Fsrr)。(4)车辆横摆动力学方程:Iz-Ixz-Iyz=lf[(Fwxfl+Fwxfr)sin δf+(Fwyfl+Fwyfr)cos δf]-lr[Fwyrl+Fwyrr]+
df2[(Fwxfr-Fwxfl)cos δf+(Fwyfl-Fwyfr)sin δf]+dr2[Fwxrr-Fwxrl]。 (5)车身俯仰动力学方程:(Iy+msh2p)-Iyz-Ixy+mshp(x-vyr)cos θ=msghp sin θ+(Fsrl+Fsrr)lr-(Fsfl+Fsfr)lf。(6)各个车轮的旋转动力学方程:Iwflfl=Tfl-FwxflRω-fFwzflRω,(7)
Iwfrfr=Tfr-FwxfrRω-fFwzfrRω,(8)
Iwrlrl=Trl-FwxrlRω-fFwzrlRω,(9)
Iwrrrr=Trr-FwxrrRω-fFwzrrRω。(10)各个车轮的垂向动力学方程:mwfl(wfl+g)=Fwzfl-Fsfl,(11)
mwfr(wfr+g)=Fwzfr-Fsfr,(12)
mwrl(wrl+g)=Fwzrl-Fsrl,(13)
mwrr(wrr+g)=Fwzrr-Fsrr。(14)悬架受力计算:Fsfl=msglr2l+Ksfl(Zwfl-Zbfl)+Csfl(wfl-bfl),(15)
Fsfr=msglr2l+Ksfr(Zwfr-Zbfr)+Csfr(wfr-brr),(16)
Fsrl=msglf2l+Ksrl(Zwrl-Zbrl)+Csrl(wrl-brl),(17)
Fsrr=msglf2l+Ksrr(Zwrr-Zbrr)+Csrr(wrr-brr)。(18)车身质心的垂向位移与车轮处车身的垂向位移的关系:Zbfl=Zb-lf sin θ+df2sin ,(19)
Zbrf=Zb-lf sin θ-df2sin ,(20)
Zbrl=Zb+lr sin θ+dr2sin ,(21)
Zbrr=Zb+lr sin θ-dr2sin 。(22)轮胎垂向载荷计算:Fwzfl=mglr2l+Kwfl(Zqfl-Zwfl)+Cwfl(qfl-wfl), (23)
Fwzfr=mglr2l+Kwfr(Zqfr-Zwfr)+Cwfr(qfr-wfr), (24)
Fwzrl=mglf2l+Kwrl(Zqrl-Zwrl)+Cwrl(qrl-wrl), (25)
Fwzrr=mglf2l+Kwrr(Zqrr-Zwrr)+Cwrr(qrr-wrr)。 (26)轮胎侧偏角计算:αfl=arctanvy+lfrvx-df2r-δf,(27)
αfr=arctanvy+lfrvx+df2r-δf,(28)
αrl=arctanvy-lfrvx-df2r,(29)
αrr=arctanvy-lfrvx+df2r。(30)轮胎滑移率计算:σi=vxi,c-vxvx,i=fl,fr,rl,rr。(31)公式中涉及的具体参数如表1所示。
表1参数说明
Tab.1Parameter Specification
参数描述整车质量m/kg前轮转角 δf/rad车轮角速度 ωi/(rad·s-1)滚动阻力系数 f车辆俯仰角 θ/rad前、后轴距 lf,lr/m车身俯仰半径 hp/m整车侧倾角阻尼 C/(N·m·s·rad-1)后轴侧偏刚度 Cr/(N·rad-1)后悬架刚度系数 Ksr/(N·m-1)参数描述簧上质量 ms/kg纵向车速 vx/(m·s-1)车轮转动惯量 Iwi/(kg·m-2)横摆角速度 r/(rad·s-1)整车转动惯量 Ix Iy Iz/(kg·m-2)前、后轮距 df, dr/m轮胎纵、侧向力 Fwxi, Fwyi/N整车侧倾角刚度 K/(N·m·rad-1)轮胎法向刚度 Kwi/(N·m-1)前悬架阻尼系数 Csf/(N·S·m-1)参数描述轮胎处质量 mwi /kg侧向车速vy/(m·s-1)车轮转动半径 Rω/m车身侧倾角/rad车身惯量矩 Ixy Iyz Ixz/(kg·m-2)车身侧倾半径 hr/m轮胎垂向载荷 Fwzi/N前轴侧偏刚度 Cf/(N·rad-1)前悬架刚度系数 Ksf/(N·m-1)后悬架刚度系数 Ksr/(N·s·m-1)注:i=fl,fr,rl,rr分别代表左前轮、右前轮、左后轮、右后轮,下文含义相同。
1.2轮胎模型
本研究采用Dugoff非线性轮胎模型。轮胎侧向力与垂直载荷、侧偏角有关。轮胎侧向力与侧偏角的关系可以分为线性区、非线性区和饱和区。垂直载荷对侧向力的影响体现在非线性区与饱和区。Dugoff轮胎模型的输入为轮胎滑移率、轮胎侧偏角和轮胎的垂向载荷,输出为轮胎的纵向力和侧向力[1415]。对于单个车轮,在轮胎坐标系下,轮胎纵向力和侧向力可由式(32)—式(34)表达。λi=μFwzi(1+σi)(1-εvvx(σ2i+(tan αi)2)1/2)2((Cσσi)2+(Cα tan αi)2)1/2。(32)
fi(λi)=(2-λi)λi,λi<1,1,λi≥1。 (33)
Fwxi=Cσσi1+σifi(λi),Fwyi=Cαtan αi1+σifi(λi)。 (34)式中:Fwxi,Fwyi为轮胎纵、侧向力;μ为轮胎路面附着系数;Cσ,Cα为轮胎纵、侧向刚度;εv为速度影响因子;λi为轮胎非线性因子,σi为轮胎滑移率,αi为轮胎侧偏角。
2侧翻指标关联性分析
目前表征车辆侧翻特性的指标主要包括横向载荷转移率、侧倾角和侧向加速度,3类指标中仅有侧向加速度能以合理的性价比进行准确测量,若能以侧向加速度建立间接表征横向载荷转移率和侧倾角的方法,则能显著提高侧翻预警控制系统的性能。
2.1横向载荷转移率指标
车辆在平直路面上行驶时,不会受到侧向力影响,车身质心位于左右对称面内,此时两侧车轮垂向负载相同;当车辆驶入弯道后,车身受到侧向离心力作用,车身绕侧倾轴向外侧倾转,质心不再位于对称面内,而是向外侧偏移,此时两侧车轮垂向负载不再对称分布,部分负载由车辆内侧横向转移至外侧,出现外侧车轮承受较大垂直载荷的现象。
如果车辆驶入弯道速度增加时,车辆本身受到的側向离心力将增大,车身发生更大倾转,两侧车轮的垂向载荷差值将会不断变大。当处于极限工况时,外侧车轮承受车辆全部垂直载荷(Gvehicle),即内侧车轮将处于不承受任何垂直载荷的临界状态。Fz,inner=0, Fz,outer=Gvehicle, (35)此时定义车辆横向载荷转移率(lateral load transfer ratio, LTR)指标表征这种载荷的整体分布变化[16],并且用来预警侧翻危险程度。LTR=∑Fz,left-∑Fz,right∑Fz,left+∑Fz,right。 (36)车辆在处于临界侧翻前,可能处于某一轴车轮先抬起离地的状态,此时式(36)所定义的指标无法给出具体信息。定义单个车轴的横向载荷转移率(LTRaxle)表征这种变化,并且用来预警车轮抬起危险程度。LTRaxle=Fz,left-Fz,rightFz,left+Fz,right,(37)
|LTR|=1。 (38)2.2侧向加速度指标
车辆转弯是纵向与侧向运动的合成。侧向加速度可以表征车辆侧向运动的程度,侧向加速度越大,车辆受到侧向离心力作用越大,车身倾转越大,车辆侧翻危险越大。因此可以用侧向加速度作为预测侧翻危险的指标\[17\]。侧向加速度由式(39)定义。ay=dvydt。(39)2.3侧倾角指标
车辆转弯时绕侧倾轴发生倾转的幅度可以用侧倾角直观表征。车辆受到侧向离心力越大,侧倾角也将越大。车辆侧翻是车身侧倾角超过最大自平衡的临界状态。因此,侧倾角也可以作为侧翻指标[18]。
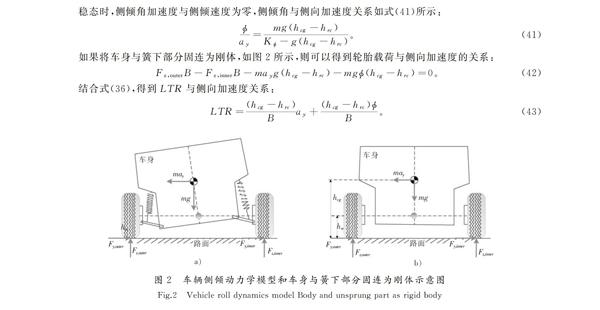
2.4多侧翻指标关联模型
简化的车辆侧倾动力学[19]可以表示为Ix+C+K-mg(hcg-hrc)-mayg(hcg-hrc)=0。(40)稳态时,侧倾角加速度与侧倾速度为零,侧倾角与侧向加速度关系如式(41)所示:ay=mg(hcg-hrc)K-g(hcg-hrc)。(41)如果将车身与簧下部分固连为刚体,如图2所示,则可以得到轮胎载荷与侧向加速度的关系:Fz,outerB-Fz,innerB-mayg(hcg-hrc)-mg(hcg-hrc)=0。 (42)结合式(36),得到LTR与侧向加速度关系:LTR=(hcg-hrc)Bay+(hcg-hrc)B。(43)图2车辆侧倾动力学模型和车身与簧下部分固连为刚体示意图
Fig.2Vehicle roll dynamics model Body and unsprung part as rigid body
式(41)和式(43)分别建立了侧向加速度与侧倾角、横向载荷转移的关联模型,从理论模型上看出,可基于侧向加速度建立间接表征侧倾角和横向载荷转移的侧翻指标表征方法。但是,从式(40)可看出,侧向加速度和侧倾角之间通过质量、质心高度、侧倾高度、侧倾刚度等参数建立联系,从式(42)可以看出侧向加速度与横向载荷转移之间通过侧倾角、质心高度、侧倾高度等建立联系。在实际应用中,需要考虑多参数实时标定与同步等问题,在建立侧向加速度和横向载荷转移率之间的关联时,还需设计侧倾角的实时估计算法,直接利用式(41)和式(43)进行侧翻指标表征是难以实现的。
3侧翻指标间接表征方法
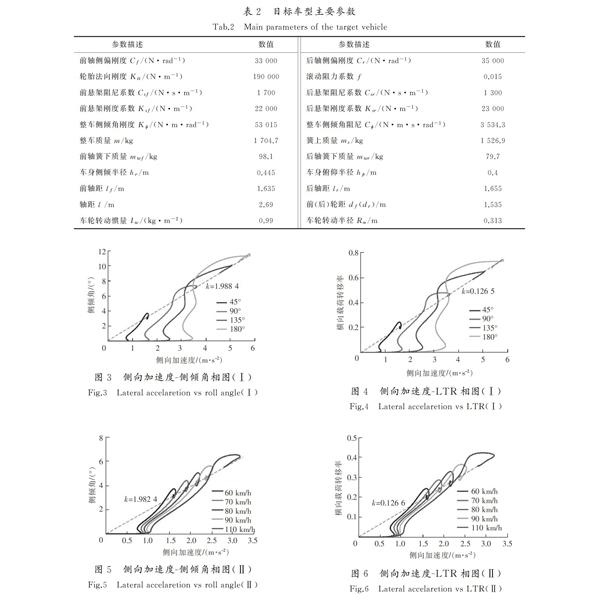
本研究基于建立的14自由度车辆模型,以某轻型货车为例展开多侧翻指标关联性仿真分析,车型参数如表2所示,通过仿真分析建立一套基于侧向加速度的侧翻指标实用化表示方法。为了研究车辆在不同工况下,车辆侧翻指标的响应情况,设置2组典型仿真工况。
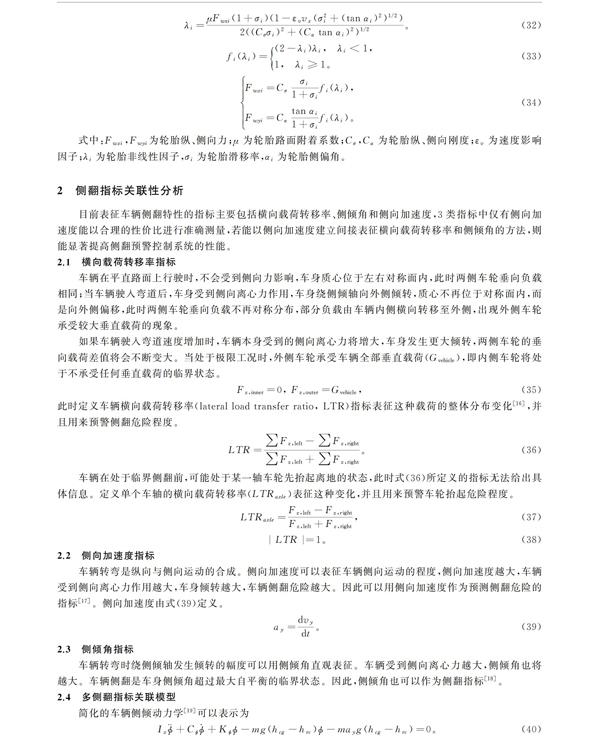
第1种工况采用固定车速(60 km/h),方向盘转角逐步提高的阶跃(STEP)转向试验。方向盘转角试验序列分别为45°,90°,135°,180°,用以产生不同的侧向加速度下侧倾角和横向载荷转移率,通过拟合探索侧倾角、横向载荷转移率与侧向加速度之间的数学关系,从而建立实用化的表征方法。
第2种工况采用固定方向盘转角(45°),车速逐步提高的试验。试验车速序列分别为60,70,80,90,110 km/h,在这种工况下,研究不同侧向加速度下的仿真结果,验证前一种工况建立的实用化表征方法的正确性。
图3和图4为第1种工况下的仿真结果,由图可见,侧倾角和横向载荷转移率与侧向加速度在整个仿真过程中呈现瞬态和稳态2个阶段。在瞬态阶段,侧倾角与LTR值均随着侧向加速度增加而快速增加,最终稳定于某一点,进入稳态阶段;观察最终稳定点的分布,发现侧倾角、LTR值与侧向加速度存在线性比例关系,稳态侧倾角、LTR值随着侧向加速度增加成比例地增加。这说明侧倾角、横向载荷转移率与侧向加速度之间存在线性比例的内在关联,通过拟合可得出:=1.988 4ay;LTR=0.126 5ay。
图5和图6为第2种工况下的仿真结果,从图中可以看出,当车辆在某一转角输入下,随着车速的不断提升,车辆的侧倾角、横向载荷转移率与侧向加速度之间的关系表现出与第1种工况相同的趋势,通过拟合发现侧倾角与侧向加速度之间存在线性比例关系,拟合得到的斜率为1.982 4;横向载荷转移率与侧向加速度之间也存在线性比例关系,拟合得到的斜率为0.126 6。
表2目标车型主要参数
Tab.2Main parameters of the target vehicle
参数描述数值前轴侧偏刚度 Cf/(N·rad-1)33 000轮胎法向刚度 Ktt/(N·m-1)190 000前悬架阻尼系数 Csf/(N·s·m-1)1 700前悬架刚度系数 Ksf/(N·m-1)22 000整车侧倾角刚度 K/(N·m·rad-1)53 015整车质量 m/kg1 704.7前轴簧下质量 mwf/kg98.1车身侧倾半径 hr/m0.445前轴距 lf/m1.635轴距 l /m2.69车轮转动惯量 Iw/(kg·m-2)0.99参数描述数值后轴侧偏刚度 Cr/(N·rad-1)35 000滚动阻力系数 f0.015后悬架阻尼系数 Csr/(N·s·m-1)1 300后悬架刚度系数 Ksr/(N·m-1)23 000整车侧倾角阻尼 C/(N·m·s·rad-1)3 534.3簧上質量 ms/kg1 526.9后轴簧下质量 mwr/kg79.7车身俯仰半径 hp/m0.4后轴距 lr/m1.655前(后)轮距 df(dr)/m1.535车轮转动半径 Rω/m0.313
图3侧向加速度侧倾角相图(Ⅰ)
Fig.3Lateral accelaretion vs roll angle(Ⅰ)
图4侧向加速度LTR相图(Ⅰ)
Fig.4Lateral accelaretion vs LTR(Ⅰ)
图5侧向加速度侧倾角相图(Ⅱ)
Fig.5Lateral accelaretion vs roll angle(Ⅱ)
图6侧向加速度LTR相图(Ⅱ)
Fig.6Lateral accelaretion vs LTR(Ⅱ)
2组试验结果基本相同,验证了提出的利用侧向加速度间接表征侧倾角和横向载荷转移率是一种切实可行的办法。但考虑到实际车辆应用,车辆的侧倾角和横向载荷转移率很难在可控性价比范围内实现精确测量,并且侧倾角和横向载荷转移率在表征车辆侧翻特性方面又表现出更好的特性,因此,可以利用高性价比的侧向加速度传感器测量得到车辆实际的侧向加速度,再通过本研究提出的实用化表征方法计算出车辆的侧倾角和横向载荷转移率,为更好地表征车辆的侧翻特性提供了一种高性价比的实用化方法,为后续车辆侧翻预警控制系统的设计提供良好的指标。
4结论
当车辆存在潜在侧翻危险时,向驾驶者提供有效预警,可以提高车辆的行驶安全性,降低事故的发生几率。侧翻指标是整个车辆预警系统的核心,理想的侧翻指标可以快速、准确地预测危险,向驾驶者发出预警信息。本研究分析多侧翻指标的关联性,建立多侧翻指标的关联模型,提出了一种实用化的侧翻指标表征方法。
1)通过对车辆侧翻危险程度可通过侧向加速度与横向载荷转移率进行表征。其中,横向载荷转移率分为整车与单轴,前者可以指示整车载荷转移状态,当其处于临界状态,即绝对值为1时,表示车辆一侧车轮即将抬起离地;后者表示车辆某一车轴载荷信息,当其处于临界状态,即绝对值为1时,表示此车轴内侧车轮即将离地抬起。侧向加速度表征车辆转弯程度,较大的侧向加速度意味着车辆绕侧倾中心倾转角度增加,质心偏离中心对称面越大,车辆越容易发生侧翻危险。
2)通過仿真分析研究侧翻指标的实用化表征方法,侧向加速度、侧倾角与横向载荷转移率作为不同种类的侧翻指标,在稳态数值上存在一定的正比例关系。当通过提高车速或者方向盘转角进行阶跃工况试验时,随着车辆侧向加速度的增加,车轮载荷将更多地从内侧转移至外侧。这样的关系对于选择侧翻指标具有指导意义,虽然横向载荷转移可以明确指示车辆的侧翻临界状态,但在实际中,涉及每个轮胎的垂直载荷测量,且直接测量成本高、误差大、易受到外界干扰。侧倾角的实际准确测量也比较困难。相比之下,侧向加速度可以利用安装在车架上的传感器直接测量得到,通过建立的实用化表征方法则能基于侧向加速度间接表征车辆的侧翻状态。
参考文献/References:
[1]张琪, 刘玉麒. 我国民用汽车保有量突破二千万辆[J]. 中国统计, 2003(8):60.
[2]余经历, 刘卡, 许利峰. 常用车辆侧翻评价标准及其发挥的作用[J]. 农业装备与车辆工程, 2016, 54(10):5154.
YU Jingli, LIU Ka, XU Lifeng. The commonly used vehicle rollover evaluation standard and its role[J]. Agricultural Equipment and Vehicle Engineering, 2016, 54(10):5154.
[3]WINKLER C B. Rollover of heavy commercial vehicles[J]. Umtri Research Review, 1999, 31(4):117.
[4]DAHLBERG E. Commercial Vehicle Stability Focusing on Rollover[D].Stockholm: KTH Royal Institute of Technology, 2001.
[5]LIM C S, PATTERSON J F, CHEN H H. Vehicle Antirollover System and Method[P]. US:20090076683 A1,2009.
[6]SCHOFIELD B, HAGGLUND T, RANTZER A. Vehicle dynamics control and controller allocation for rollover prevention[C]// Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications. Munich:[s.n.], 2006:149154.
[7]张不扬, 宗长富, 王德平. 车辆侧翻预警研究现状与关键技术[J]. 汽车技术, 2010(8):2731.
ZHANG Buyang, ZONG Changfu, WANG Deping. Status of research and key technology of vehicle rollover warning system[J]. Automobile Technology, 2010(8):2731.
[8]HAC A. Rollover stability index including effects of suspension design[J]. Proceedings of the Society for Experimental Biology and Medicine, 2004, 139(139):582588.
[9]YOON J, KIM D, YI K. Design of a rollover indexbased vehicle stability control scheme[J]. Vehicle System Dynamics, 2007, 45(5):459475.
[10]JOHANSSON B, GAFVERT M. Untripped SUV rollover detection and prevention[C]//IEEE Conference on Decision and Control. Bahamas:[s.n.], 2004:54615466.
[11]DONGYOON H, REZA L. Modeling to predict rollover threat of tractorsemitrailers[J]. Vehicle System Dynamics, 2003, 39(6):401414.
[12]KONNO N, TOKUNAGA T, INOUE S. Rollover Sensing Device[P].US:20060184301 A1, 2006.
[13]GHIKE C, SHIM T. 14 degreeoffreedom vehicle model for roll dynamics study[J]. SAE Technical Paper, 2006(1):12771287.
[14]GUNTUR R, SANKAR S. A friction circle concept for dugoffs tyre friction model[J]. International Journal of Vehicle Design, 1980(1):373377.
[15]DUGOFF H P, FANCHER P S, SEGEL L. An analysis of tire traction properties and their influence on vehicle dynamic performance[J]. SAE Technical Paper,1970:10.4271/700377.
[16]王睿, 張浩, 郑雪莲. 考虑横向载荷转移的重型车辆建模研究[J]. 长春理工大学学报(自然科学版), 2014,37(6):4550.
WANG Rui, ZHANG Hao, ZHENG Xuelian. Research on heavy vehicle modeling considering lateralload transfer[J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2014,37(6):4550.
[17]陈启鹏, 熊巧巧, 周成. 汽车侧翻预警报警装置的研究[J]. 机械与电子, 2012(11):6466.
CHEN Qipeng, XIONG Qiaoqiao, ZHOU Cheng. Research of the warning alarm device of vehicle rollover[J]. Mechinery and Electronics, 2012(11):6466.
[18]朱颖, 周炜, 郭志平,等. 基于车辆侧倾角侧翻预警算法的研究[J]. 机械设计与制造, 2011(2):5254.
ZHU Ying, ZHOU Wei, GUO Zhiping, et al. The study of vehicles rollover forewarning algorithm based on pattern recognition[J]. Mechinery Design and Manufacture, 2011(2):5254.
[19]LUNDAHL K, LEE C F, FRISK E,et al.Analyzing rollover indices for critical truck maneuvers[J].International Journal of Commercial Vehicles, 2015,8(1):189196.第39卷第2期河北科技大学学报Vol.39,No.2
2018年4月Journal of Hebei University of Science and TechnologyApr. 2018
猜你喜欢
东方教育(2016年8期)2017-01-17
大学教育(2016年12期)2017-01-03
大学教育(2016年11期)2016-11-16
科教导刊·电子版(2016年23期)2016-10-31
考试周刊(2016年76期)2016-10-09
大学教育(2016年7期)2016-07-27
大学教育(2016年7期)2016-07-27
考试周刊(2016年48期)2016-06-29
求知导刊(2016年11期)2016-06-20
