真空常温下空间用铜基粉末冶金摩擦材料的摩擦学行为及可靠性寿命
2018-05-11 03:16钟爱文姚萍屏肖叶龙周海滨樊坤阳贡太敏凌攀刘超
粉末冶金材料科学与工程 2018年1期
钟爱文,姚萍屏,肖叶龙,周海滨,樊坤阳,贡太敏,凌攀,刘超
真空常温下空间用铜基粉末冶金摩擦材料的摩擦学行为及可靠性寿命
钟爱文,姚萍屏,肖叶龙,周海滨,樊坤阳,贡太敏,凌攀,刘超
(中南大学 粉末冶金国家重点实验室,长沙 410083)
在真空常温下,对空间摩擦副进行大负荷服役条件(400 N)可靠性寿命摩擦循环试验,考察空间用铜基粉末冶金摩擦材料的摩擦磨损特性,探讨摩擦材料的可靠性寿命并揭示其摩擦磨损机理。结果表明:铜基摩擦材料在真空常温大负荷摩擦循环试验条件下,摩擦磨损过程可分成三个阶段:第一阶段(1~1 400次试验),摩擦因数由0.28增加到0.61,并趋于稳定,磨损机理以磨粒磨损为主;第二阶段(1 400~2 700次试验),摩擦因数稳定在0.61左右,磨粒磨损和粘着磨损并存;第三阶段(2 700次试验后),摩擦因数逐渐下降,磨损机理转变为较强的粘着磨损和疲劳磨损,材料表现为失效,整个试验过程中,摩擦因数稳定系数均高于0.9。研究表明,研制的铜基摩擦材料在真空常温条件下可满足转位机构和空间机械臂等的可靠性需求。
空间;摩擦材料;可靠性寿命;粉末冶金;摩擦磨损
根据中国载人航天工程“三步走”的发展战略,我国在突破并掌握空间交会对接、新一代重型运载火箭等关键技术后,预计在2020年建成空间站,成为我国空间科学研究和新技术实验的重要基地。空间站的建设和维护,要依靠对接机构、机械臂和转位机构等空间机构实现空间对接、在轨组装、燃料加注和空间维护等航天任务,而空间摩擦副是保证上述机构准确工作的重要部件之一[1]。对接机构用摩擦副承担航天器接近时的减速制动、航天器脱离时的反推离合及对接碰撞时对机构部件的安全保护等功能[2];空间机械臂中的关节制动摩擦副实现机械臂运作过程中的制动与过载保护[3−4];转位机构用摩擦副具有传递扭矩和过载保护的功能,可实现舱体的转位和再对接[5−7]。先进航天技术的国家/组织对空间用摩擦材料展开了研究,由于高度的技术保密,最新可参考的公开研究文献较少,而传统机械臂用摩擦材料难以满足空间苛刻使用要求。美国航天飞机机械臂曾采用石棉/酚醛树脂摩擦副,但由于酚醛树脂材料受强辐照后易发生交联、聚合和断链而失效[8],太空中的制动性能大幅衰减[9]。欧空局研制了一种空间机械臂用陶瓷摩擦副,但尚未明确提出摩擦副的综合安全指标,未得到应用验证[10]。俄罗斯概要性地提出一种空间用粉末冶金摩擦副,未论述摩擦副的性能指标。中南大学率先开展了空间用铜基粉末冶金摩擦副的研制,所研制的对接机构用摩擦副已成功应用于“神舟”载人飞船与“天宫”航天器的在轨交会对接[11−13]。与对接机构用摩擦副相比,空间机械臂和转位机构用摩擦副具有工作频率高、在轨服役时间长(至少10年)及工作负荷大等苛刻工况特点,对摩擦副的使用寿命及可靠性提出了更高要 求[14−15]。与大气环境相比,空间环境较为苛刻,具有高真空、各种宇宙射线及原子氧等特征。在世界宇航实践中,曾多次出现因空间机构中的摩擦学问题而导致空间任务失败的案例[16−17]。为了保证空间摩擦副的可靠性使用,模拟空间环境下的可靠性寿命测试不容忽视。前期中南大学的研究结果表明[18]:辐射、原子氧及微重力对空间摩擦副的影响较小,而真空环境与温度的变化对空间摩擦副的影响较大。因此,在前期研制的空间摩擦副基础上,模拟转位机构、机械臂大负荷的苛刻服役条件,开展真空常温下的摩擦副可靠性寿命试验,揭示真空常温下空间摩擦副的可靠性寿命及摩擦学行为,为判断机械臂、转位机构等用摩擦材料能否满足空间长服役时间的使用要求提供理论和试验依据。
1 实验
1.1 材料制备
表1所列为制备空间用铜基粉末冶金摩擦材料的主要原料化学成分配比及其技术参数。将上述粉末均匀混合后,采用粉末冶金方法加压烧结,烧结后材料的密度为5.58 g/cm3,孔隙度为3.7%,尺寸为80 mm×50 mm的环形试样。摩擦材料由基体组元(Sn和Fe等强化的铜基体)、摩擦组元(SiO2等)及润滑组元(MoS2、石墨等)组成,其金相显微组织如图1所示。
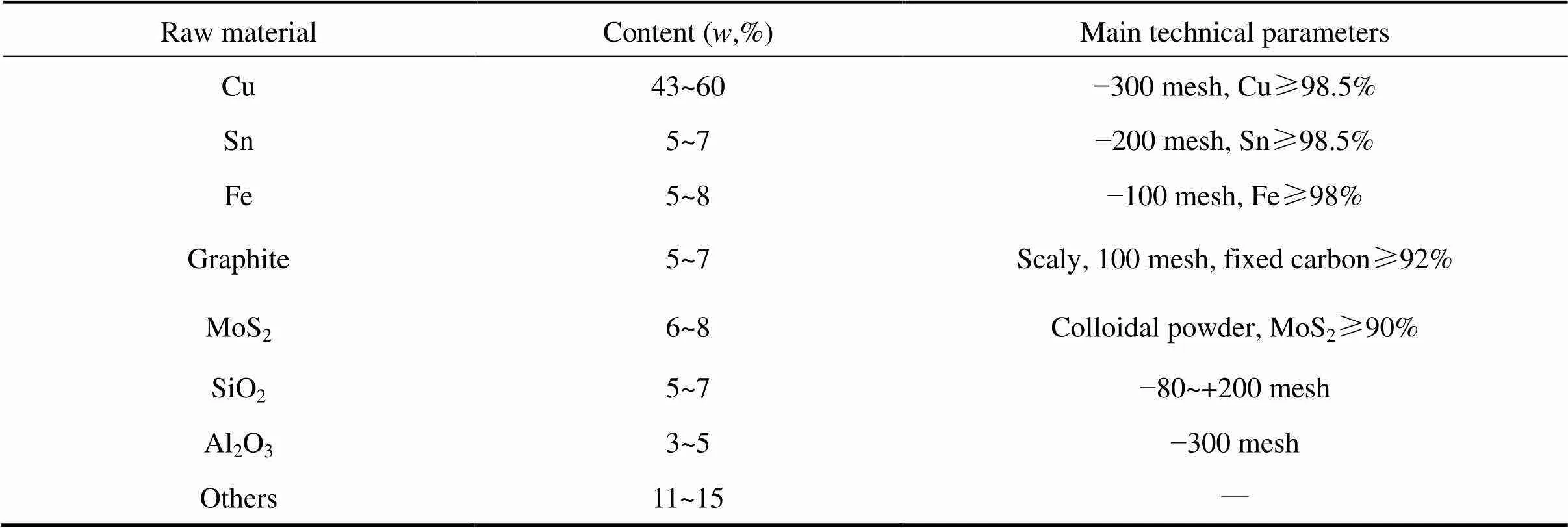
表1 摩擦材料主要原料的成分配比及其技术参数
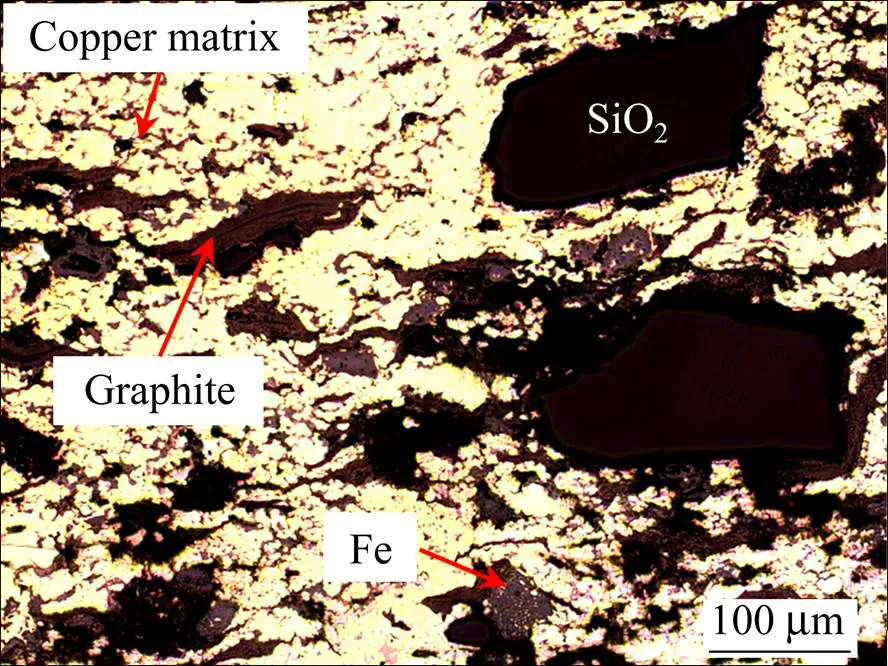
图1 粉末冶金摩擦材料显微组织
1.2 测试与表征
空间摩擦副装入图2所示的自制多片式离合器中,空间摩擦副在服役时以弹簧(5)的压紧力来实现各项功能,通过(3)与真空系统外的电机相连,为摩擦副传动提供动力,通过(4)与真空系统外的制动器相连,实现制动离合器的制动。制动离合器实现摩擦材料(2)配对2Cr13不锈钢(1) (HRC 37~ 42)的连续循环摩擦磨损性能测试,采用力矩传感器采集摩擦力矩M,与计算机相连记录数据,按照公式(1)将摩擦力矩数据换算成摩擦因数,具体实验参数如表2所列。

式中:摩擦因数;摩擦力矩;摩擦副所受的正向压力(400 N);摩擦材料半径(3.25×10−2 m);摩擦副的接触面数(9面)。

表2 空间摩擦副在真空常温下的实验参数
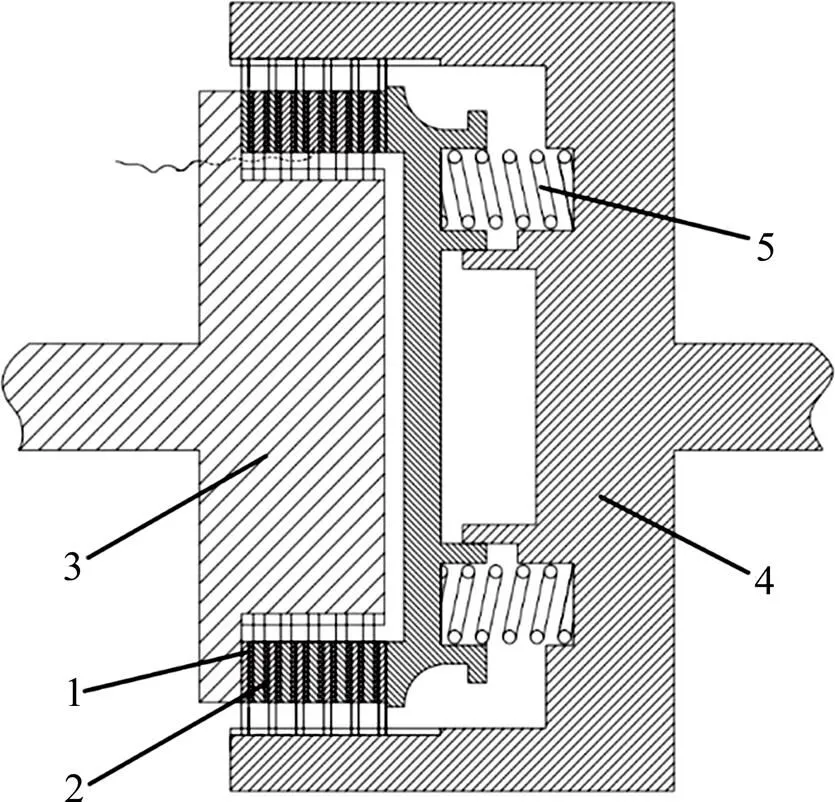
1—Friction discs; 2—Counterpart discs; 3—Central shaft connected with the motor; 4—Central shaft connected with brake; 5—Spring
摩擦因数稳定系数а用平均摩擦因数μ与最大摩擦因数max的比值来表征,见式(2),稳定系数越大,摩擦副运行越平稳可靠[11]。
式中:а为摩擦因数稳定系数;μ为平均摩擦因数;max为最大摩擦因数。
采用PTT-A+300型分析天平称量摩擦实验前后摩擦材料的质量来计算磨损量,HR−150A型洛氏硬度计测量材料表面宏观硬度。利用DM4500P型金相显微镜观察分析材料微观组织,KYKY−2800型扫描电子显微镜(SEM)观察摩擦表面形貌与亚表面显微组织,VEGA 3 LMU/LMH型扫描电子显微镜(SEM)分析磨屑,VANTAGE能谱仪(EDS)进行能谱分析。
2 结果与分析
2.1 摩擦磨损性能分析
图3为摩擦副的摩擦因数及其稳定系数与摩擦次数的关系曲线。随摩擦次数增加,摩擦因数及其稳定系数呈阶段性变化。在1~1 400次试验阶段,摩擦因数随制动次数增加,由0.28增加到0.61并趋于稳定;继续进行摩擦试验,于1 400~2 700次试验阶段,摩擦因数围绕0.61左右小幅波动,2 700次试验后,摩擦因数逐渐降低,波动现象较为显著。在整个试验过程中,摩擦因数稳定系数均高于0.9,为保证空间机构可平稳运行,要求摩擦副的摩擦因数稳定系数不应小于0.90,因此摩擦因数及其稳定系数常用于评估摩擦副的可靠性寿命。
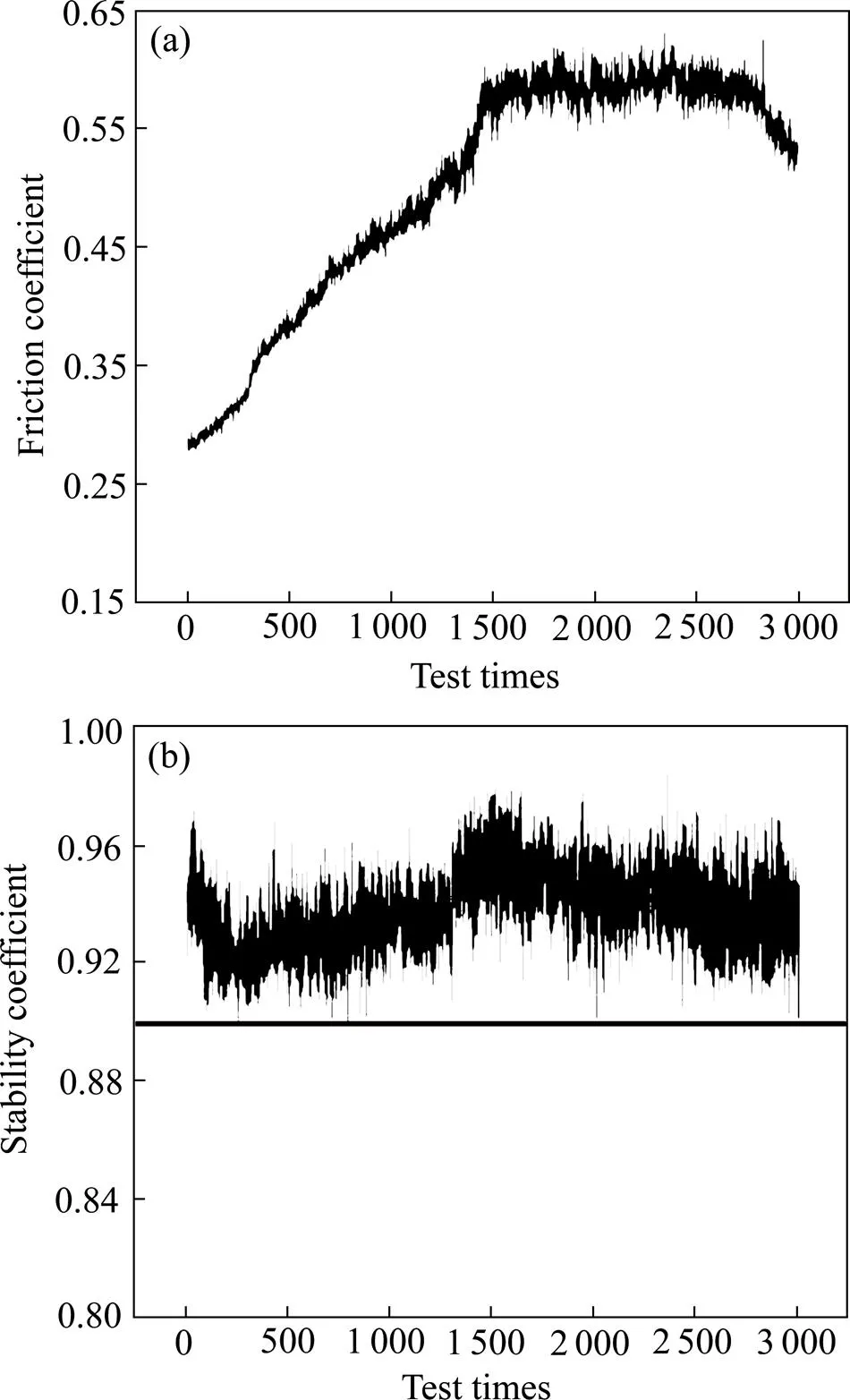
图3 真空常温连续循环大负荷摩擦试验下摩擦材料的摩擦性能
Fig.3 Friction properties as a function of friction cycles(in vacuum at +20 ℃)
(a) Friction coefficient; (b) Stability coefficient
图4为摩擦实验后磨屑形貌图,发现磨屑形貌随摩擦过程的进行而逐渐变化,1~1 400次试验阶段,主要为小颗粒磨屑(图4(a)),由图4(a)中A区放大图可知,尺寸在微米级及以下;1 400~2 700次试验阶段,磨屑为少量较大块状磨屑及分散的细小颗粒磨屑,其尺寸较第一阶段大,但仍在微米级及以下(图4(b)中B区放大图);2 700次试验后,小颗粒磨屑逐渐减少,较大块状磨屑逐渐增多(图4(c)),尺寸约在50 μm 以内。

图4 磨屑形貌SEM图
(a) First stage; (b) Second stage; (c) Third stage
因此,根据摩擦因数及其稳定系数和磨屑的变化特征,摩擦材料在连续循环大负荷摩擦试验中,可划成三个阶段:第一阶段,上升阶段(1~1 400次);第二阶段,稳定阶段(1 400~2 700次);第三阶段,下降阶段(2 700次后)。
图5为每个阶段摩擦材料单次摩擦平均磨损量,摩擦材料在整个制动过程中均产生磨损。第一阶段,摩擦材料平均每次摩擦磨损量约0.127 mg;第二阶段的磨损量(约0.214 mg/time)最高,要明显高于第三阶段(约0.038 6 mg/time)。
图6为每个阶段试验后摩擦材料表面的宏观硬度值。由图可知,摩擦试验后,摩擦材料表面宏观硬度值相对未试验材料(RM)与磨合后材料(RI)大,且随着制动的不断进行,硬度逐渐增加,但硬度分布范围在整个制动过程中一直保持较宽。
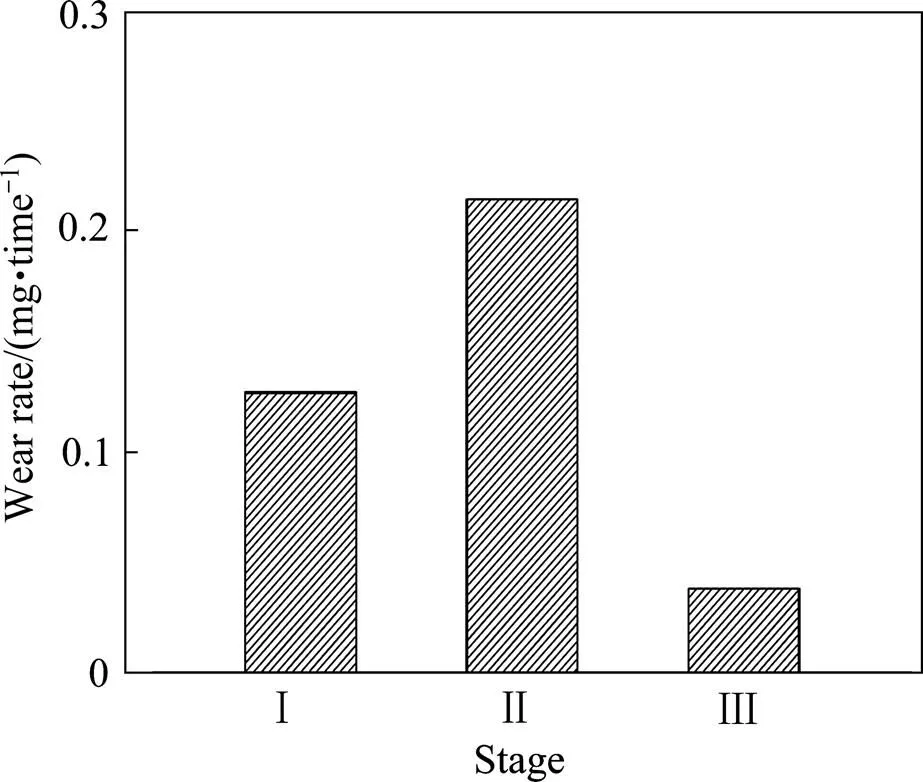
图5 每个阶段摩擦材料的单次平均磨损量
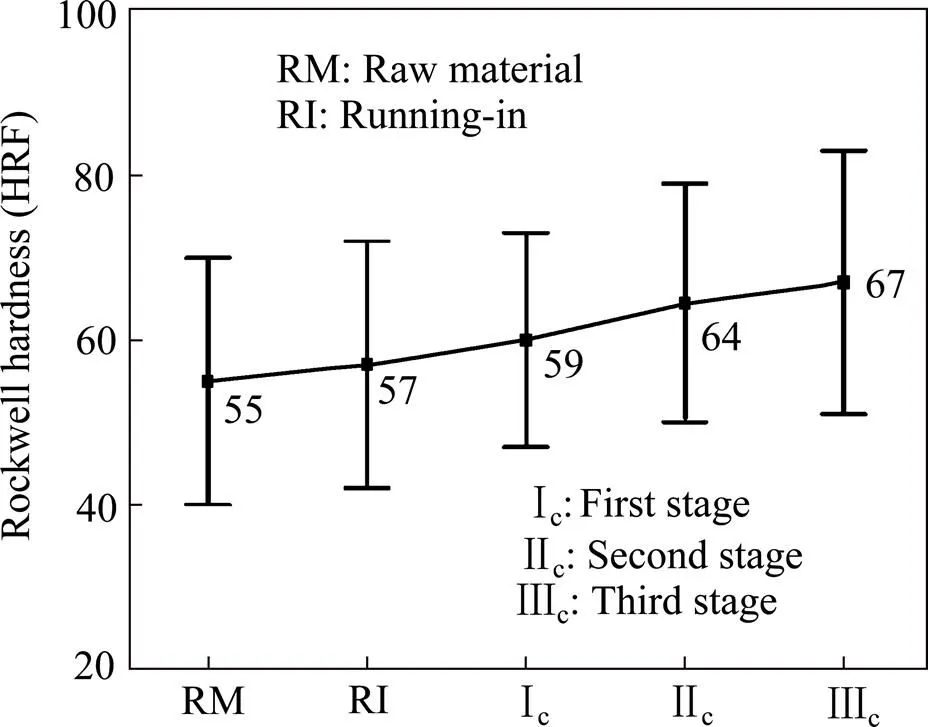
图6 每个阶段摩擦试验后摩擦材料的表面宏观硬度
2.2 摩擦学行为与可靠性寿命分析
2.2.1 摩擦表面分析
图7为真空常温摩擦磨损试验各阶段摩擦材料表面的SEM及EDS分析图。第一阶段,摩擦材料表面存在犁沟(图7(a)),由表面全扫能谱分析(图7(b))可知,摩擦材料表面几乎不存在对偶材料特征元素Cr,说明第一阶段对偶材料很少向摩擦材料转移。在大负荷循环制动下,较软摩擦材料表面经受对偶微凸体犁削,或表面脱落硬质相(磨屑)的嵌入,摩擦材料表面经反复碾压形成犁沟。在大气下,氧化膜能隔离材料间的直接接触,降低摩擦因数[19],真空下,材料表面水气析出与氧化物等物质脱落,是产生冷焊的首要条 件[20],且冷焊程度与压力、温度和载荷作用时间成正比[21]。
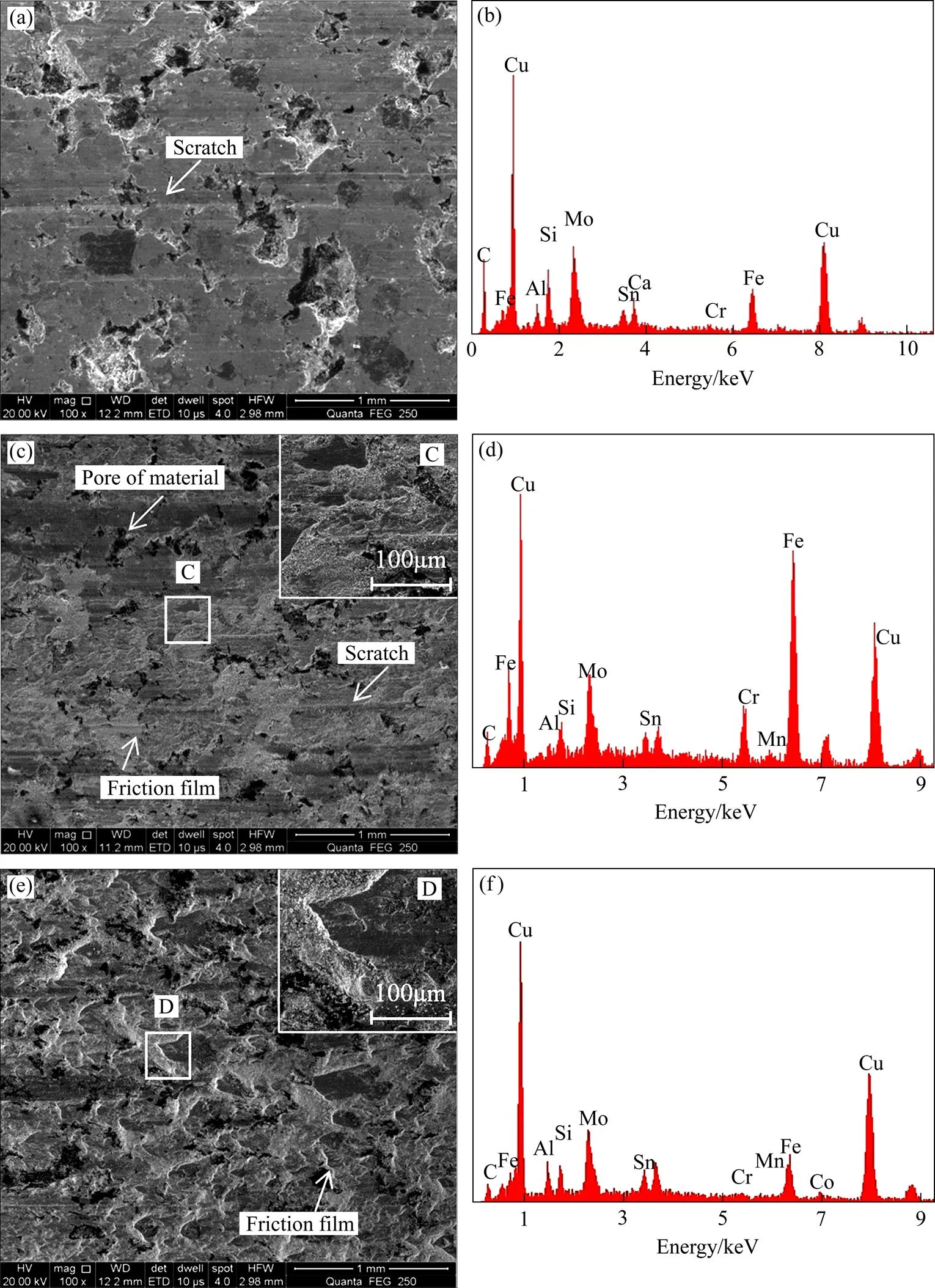
图7 摩擦材料摩擦表面SEM图及EDS分析
(a), (b) First stage; (c) Second stage; (d) EDS analysis of C area; (e) Third stage; (f) EDS analysis of D area
第二阶段摩擦材料表面存在少量犁沟与摩擦膜,摩擦膜将部分摩擦材料表面的孔隙涂抹,将图7(c)中摩擦膜覆盖区(C区)进行放大,发现摩擦膜表面存在少量犁沟,对C区能谱分析(图7(d))可知,摩擦膜除摩擦材料自身Cu,Si及Sn等元素外,还存在对偶材料特征元素Cr。说明摩擦过程中,对偶材料向摩擦材料表面转移,摩擦膜为摩擦材料与对偶材料的混合物。无氧化膜与水膜的摩擦材料与对偶材料表面易产生冷焊。
由图7(e)可知,第三阶段的摩擦材料表面涂抹有大量的“层片状”摩擦膜,已基本将表面孔隙填满,D区放大后可知,每一片层片状摩擦膜涂抹较均匀、平整且涂抹面积较大。对D区进行能谱分析(图7(f))可知,第三阶段摩擦膜内几乎不含对偶材料特征元素Cr,其成分几乎与摩擦材料一致,说明第二阶段转移到摩擦材料表面的对偶材料及其与摩擦材料的混合物一起转移到对偶材料表面。
图8所示为真空常温摩擦试验各阶段对偶表面SEM照片及表面全扫EDS分析图。第一阶段,对偶表面存在犁沟与少量涂抹物(图8(a)),经能谱分析(图8(b))可知,涂抹物中存在摩擦材料特征元素Cu,结合第一阶段摩擦材料表面分析结果,表明第一阶段只存在少量摩擦材料向对偶材料的转移,摩擦表面并未形成第二阶段与第三阶段较为明显的层片状涂抹物。随着摩擦次数增多,对比图8(b),图8(d)与图8(f)可知,对偶表面的Cu/Cr(原子比)逐渐增加,说明摩擦材料向对偶材料转移量增多。对比图8(a),图8(c)与图8(e)可知,对偶表面层片状涂抹物面积逐渐增多,第三阶段层片状涂抹物相对第二阶段较大,且第二、三阶段对偶表面不存在犁沟。

图8 对偶材料摩擦表面SEM图及EDS分析
(a), (b) First stage; (c), (d) Third stage; (c), (d) Third stage
2.2.2 摩擦亚表面分析
图9为真空常温条件下摩擦材料亚表面SEM图。第一阶段,摩擦材料表面较平整,并未出现明显的摩擦膜。随摩擦次数增加,第二阶段的摩擦材料表面较破碎,但相对平整,摩擦材料表面涂抹少量摩擦膜。部分鳞片状石墨裸露于摩擦表面,减少了对偶材料与摩擦材料中金属成分的直接接触,降低冷焊倾向,稳定了摩擦因数。至第三阶段,摩擦层涂抹范围扩大,摩擦材料表面较不平整,并且在摩擦材料表面部分区域有裂纹出现,在大负荷循环作用下,裂纹易沿摩擦方向扩展并不断连接,最后在表层脱落,形成较大块状磨屑(图4(c))。
2.2.3 摩擦磨损机理及可靠性寿命分析
摩擦材料在大负荷循环制动下,表层不断发生塑性变形(加工硬化),致使摩擦材料硬度逐渐增加;摩擦材料为金属与非金属的混合物,其中金属成分与非金属成分的硬度差异较大,而真空中氧化膜无法形成,使得各阶段摩擦材料的成分与初始材料和磨合后材料并无较大差别,因此硬度分布范围在整个寿命过程中一直较宽。
第一阶段:真空中材料表面的氧化膜破碎脱落后无法形成,导致摩擦材料与对偶材料直接接触,对偶表面微凸体对较软的摩擦材料表面产生犁削;同时,小颗粒磨屑继续以第三体的形式在摩擦层内滚滑,参与磨粒磨损,对偶表面产生犁削。磨粒磨损的作用下,摩擦表面磨损程度逐渐增加,摩擦因数逐渐增加。综上所述,第一阶段磨损机理为磨粒磨损。
第二阶段:历经第一阶段大负荷循环作用后,金属间易形成原子键结合,局部过度摩擦,导致凸点处焊接,较软的摩擦材料易向对偶材料转移,冷焊加剧,产生粘着磨损;对偶表面微凸体对摩擦材料表面犁削,摩擦材料进行磨粒磨损。犁削、冷焊导致摩擦因数增加;石墨的暴露、MoS2烧结后分解物的存在[22]与小颗粒磨屑的“滚滑”都具有较好的减摩作用。各种因素相互制约使摩擦因数维持在0.61左右波动。磨粒磨损与较强的粘着磨损使摩擦材料磨损较大。综上所述,第二阶段磨粒磨损与粘着磨损共存,空间摩擦副能满足转位机构等的可靠性需求。
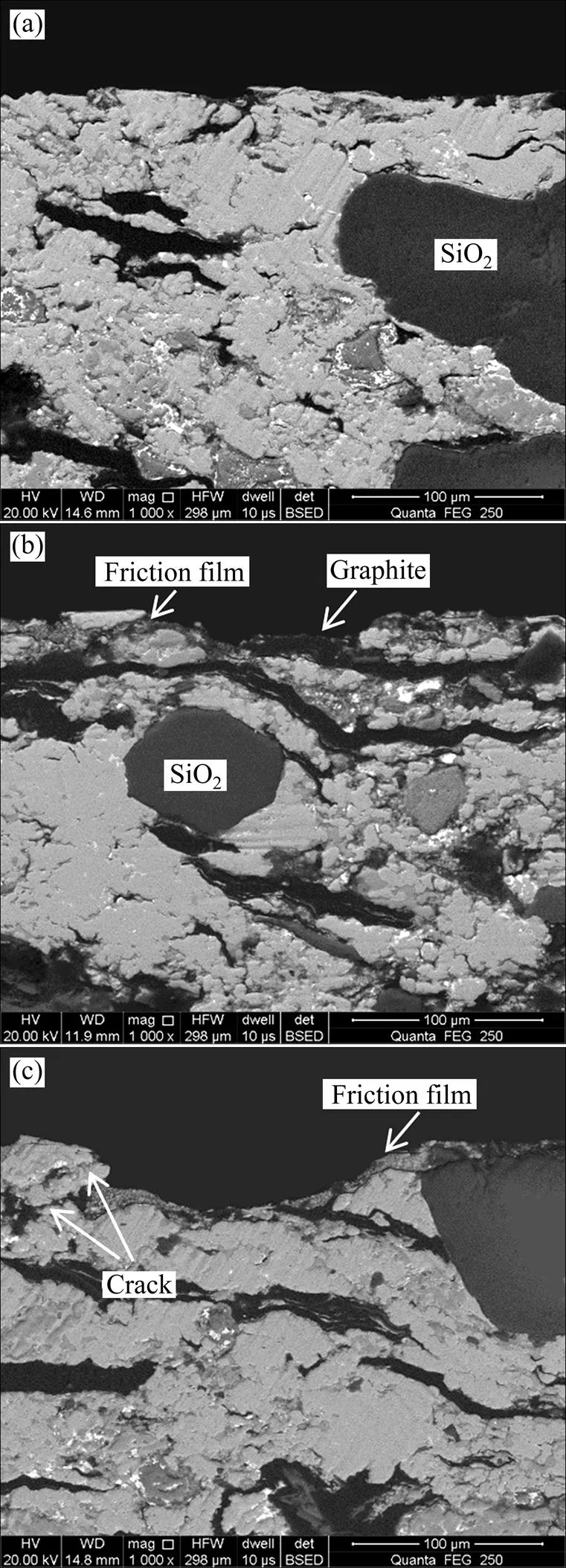
图9 摩擦材料亚表面显微形貌SEM图
(a) First stage; (b) Second stage; (c) Third stage
第三阶段:层片状摩擦膜与对偶材料及其表面的涂抹物直接进行摩擦磨损,且热对流在真空下基本消失,摩擦热主要以热辐射与热传导方式散失且散失困难,当摩擦累积接触时间较长,摩擦层内积累大量的热,表面升温,冷焊加剧,粘着磨损加剧;材料表面无犁沟,说明不发生磨粒磨损;摩擦材料表面裂纹在摩擦力与正压力共同作用下逐渐扩展,连接至表层后剥落并形成磨屑,磨屑易在大负荷碾压中破碎并形成相对较小的块状磨屑,摩擦表面出现疲劳磨损。第三阶段磨损量低于第二阶段,说明第三阶段表层材料的脱落量(磨屑)相对第二阶段小,脱落物在两种材料表层间相互转移。综上所述,第三阶段产生粘着磨损和疲劳磨损。
3 结论
1) 空间摩擦副在真空常温下的大负荷连续循环摩擦试验,可分成三个阶段:第一阶段(上升阶段,1~ 1 400次),摩擦因数由0.28增加到0.61;第二阶段(稳定阶段,1 400~2 700次),摩擦因数维持在0.61左右波动;第三阶段(下降阶段,2 700以后),摩擦因数逐渐减小。整个试验过程中,摩擦因数稳定系数均高于0.9,摩擦材料一直处于磨损状态。
2) 第一阶段,摩擦副的主要磨损机理为磨粒磨损;第二阶段,摩擦副的磨损机理为磨粒磨损和粘着磨损;第三阶段,摩擦副的磨损机理为粘着磨损和疲劳磨损。
5) 研制的摩擦副在真空常温下可满足转位机构、空间机械臂的可靠性需求。
[1] 周建平. 我国空间站工程总体构想[J]. 载人航天, 2013, 19(2): 1−10. ZHOU Jianping. Chinese space station project overall vision[J]. Manned Spaceflight, 2013, 19(2): 1−10.
[2] XIAO Y, YAO P, ZHOU H, et al. Friction and wear behavior of copper matrix composite for spacecraft rendezvous and docking under different conditions[J]. Wear, 2014, 320(s1/2): 127−134.
[3] 于登云, 孙京, 马兴瑞. 空间机械臂技术及发展建议[J]. 航天器工程, 2007, 16(4): 1−8. YU Dengyun, SUN Jing, MA Xingrui. Suggestion on development of Chinese space manipulator technology[J]. Spacecraft Engineering, 2007, 16(4): 1−8.
[4] RUSCONI A, MAGNANI P, GRASSO T. DEXARM-a dextrous robot arm for space applications[C]. Proceedings of the8th ESA Workshop on Advanced Space Technologies for Robotics and Automation. Noordwijk Netherlands: ESTEC, 2004.
[5] 汤树人, 陈宝东, 柏合民, 等. 对接转位机构末端抓手装置的创新设计[J]. 机械传动, 2009, 33(5): 32−35. TANG Shuren, CHEN Baodong, BAI Hemin, et al. Innovated design of terminal capture device in module redocking mechanism[J]. Journal of Mechanical Transmission, 2009, 33(5): 32−35.
[6] 秦文波, 陈萌, 张崇峰, 等. 空间站大型机构研究综述[J]. 上海航天, 2010, 27(4): 32−42. QIN Wenbo, CHEN Meng, ZHANG Chongfeng, et al. Surveys on large-scale mechanism of space station[J]. Aerospace Shanghai, 2010, 27(4): 32−42.
[7] 白鑫林. 空间站对接与转位机构性能测试研究[D]. 沈阳: 中国科学院沈阳自动化研究所, 2015. BAI Xinlin. Research on capacity test of space docking mechanism and redocking manipulator[D]. Shenyang: Shenyang Institute of Automation, 2015.
[8] GROSSMAN E, GOUZMANn I. Space environment effects on polymers in low earth orbit[J]. Nuclear Instruments & Methods in Physics Research, 2003, 208(9): 48−57.
[9] DIPIPPO S, COLOMBINA G, BOUMANS R, et al. Future potential applications of robotics for the International Space Station[J]. Robotics and Autonomous Systems, 1998, 23(1/2): 37−43.
[10] BAKER F C, FAVRE E, MOZZON J M, et al. European Robotic Arm (ERA) manipulator joint system motor unit and tribologicalbrake[C]// 8th European Space Mechanisms and Tridology Symposium, 1999.
[11] YAO Pingping, XIAO Yelong, DENG Junwang. Study on space copper-based powder metallurgy friction material and its tribological properties[J]. Advanced Materials Research, 2011, 284/286: 479−487.
[12] 肖叶龙, 姚萍屏, 贡太敏, 等. 石墨与MoS2配比对空间对接用摩擦材料性能的影响[J]. 中国有色金属学报, 2012, 22(9): 2539−2545. XIAO Yelong, YAO Pingping, GONG Taimin, et al. Effects of proportion of graphite and MoS2on performances of space docking friction material[J]. The Chinese Journal of Nonferrous Metals, 2012, 22(9): 2539−2545.
[13] YAO Pingping, XIAO Yelong, ZHOU Haibin, et al. Tribological and mechanical properties of materials for friction pairs used to space docking[J]. Advanced Materials Research, 2012, 538/541: 1929−1934.
[14] COWAN R S, WINER W O. Friction lubrication and wear technology[M]. New York: ASM, 1992: 39−44.
[15] LOGAN J. China’s space program: Options for U S China cooperation[C]. Congressional Research Service Reports. Library of Congress. Congressional Research Service, 2008: 1−6.
[16] BURT R R, LOFFI R W. Failure analysis of international space station control moment gyro[C]. Proceedings of the 10th European Space Mechanisms and Tridology Symposium, San Sebastián, 2003, 524(524): 13−25.
[17] JOHNSON M R, GEHLING R, HEAD R. Failure of harmonic gears during verification of a two-axis gimbal for the mars reconnaissance orbiter spacecraft[C]. Proceedings of the 38th Aerospace Mechanisms Symposium, Langley Research Center, 2006: 17−19.
[18] 肖叶龙,. 模拟空间环境及结构变化对空间对接用摩擦副性能的影响[D]. 长沙: 中南大学, 2012,XIAO Yelong. Effects of the aerospace environmental factors and structural changes on properties of friction pairs for space docking[D]. Changsha: Central South University, 2012.
[19] STOTT F H, GLASCOTT J, WOODG C. Models for the generation of oxides during sliding wear[J]. Proceedings of the Royal Society A, 1985, 402(1822): 167−186.
[20] 汪力, 闫荣鑫. 超高真空环境冷焊与防冷焊试验现状与建议[J]. 航天器环境工程, 2008, 25(6): 558−563. WANG Li, YAN Rongxin. A study on cold welding and protection against cold welding[J]. Spacecraft Environment Engineering, 2008, 25(6): 558−563.
[21] 翟文杰, 高云峰, 齐毓霖, 等. 超高真空下电流对铜/铝接触副静态粘着的影响[J]. 机械工程师, 2001(10): 23−25. ZHAI Wenjie, GAO Yunfeng, QI Yulin, et al. Effect of electric currents on static adhesion for Cu/Al contact under ultrahigh vacuum condition[J]. Mechanical Engineer, 2001(10): 23−25.
[22] 姚萍屏, 邓军旺, 熊翔, 等. 空间用铜基粉末冶金摩擦材料及其摩擦性能研究[C]. 2007全国粉末冶金学术及应用技术会议暨海峡两岸粉末冶金技术研讨会, 2007. YAO pingping, DENG Junwang, XIONG Xiang, et al. The research of space docking copper-based powder metallurgy friction material and its tribological performances[C]. National Conference on Powder Metallurgy Academic and Applied Technology and Cross Strait Powder Metallurgy Technology Conference, 2007.
(编辑 高海燕)
Tribological behaviors and reliability life of Cu-based friction materials for space applications in vacuum at room temperature
ZHONG Aiwen, YAO Pingping, XIAO Yelong, ZHOU Haibin, FAN Kunyang, GONG Taimin, LING Pan, LIU Chao
(State Key Laboratory of Powder Metallurgy, Central South University, Changsha 410083, China)
The friction and wear characteristics of Cu-based powder metallurgy friction materials were evaluated on a space friction testing machine at high load (400 N) in vacuum at room temperature. The reliability life and wear mechanism of friction materials were investigated and revealed respectively. The experimental results show that there are three stages during the friction process. At the first stage, the friction coefficient increases from 0.28 to 0.61, and the abrasive wear is the dominant wear mechanism. In the second stage, the friction coefficient remains steadily (~0.61), and the dominant wear mechanism is the mixture of abrasive wear and adhesive wear. At the third stage, the friction coefficient begins to decrease. The dominant wear mechanism transforms to be the mixture adhesive wear and severe fatigue wear, leading to the material failure. During the test, the stability friction coefficient keeps up 0.9. The friction pairs can meet the demand of indexing mechanism and space manipulator in vacuum at room temperature.
space; friction materials; reliability life; powder metallurgy; friction and wear
TF125
A
1673-0224(2018)01-110-09
国家自然科学基金资助项目(51475476,51175516);中南大学研究生自主探索创新项目(2014 zzts023,2015zzts029);湖南省战略性新兴产业科技攻关类资助项目(2015GK1034);粉末冶金国家重点实验室资助项目(621020006)
2017−03−29;
2017−06−28
姚萍屏,研究员,博士。电话:0731-88876614;E-mail: ppyao@csu.edu.cn
猜你喜欢
北京生物医学工程(2022年6期)2022-12-24
摩擦学学报(2022年5期)2022-10-11
材料保护(2022年12期)2022-02-16
小学生学习指导(中年级)(2021年3期)2021-04-06
小学生学习指导(低年级)(2020年9期)2020-11-09
数学物理学报(2019年6期)2020-01-13
数学物理学报(2019年4期)2019-10-10
材料研究与应用(2019年1期)2019-04-01
中学数学教学(2018年6期)2018-12-22
小学生学习指导(中年级)(2018年9期)2018-11-29